激光条纹中心线提取算法总结和复现
滤波、分割等预处理过程省略。
输入图像为灰度图,激光条纹水平走向。

目录
-
- 几何中心法
- 极值法
- 细化法
- 灰度重心法
- 法向质心法
- Steger算法
几何中心法
检测出光条边界 l、h 后,把两边界的中间线(l + h)/2作为激光条纹的中心线。
#include 极值法
极值法是将激光条纹横截面上灰度值最大点作为激光条纹的中心。
#include 细化法
骨架细化法是重复地剥掉二值图像的边界像素,在剥离的过程中必须保持目标的连通性,直到得到图像的骨架。
具体原理介绍可见Zhang-Suen 图像骨架提取算法的原理和OpenCV实现
#include 灰度重心法
灰度重心法就是对图像中的每一列(行)提取灰度重心作为激光条纹的中心位置。若某行的非零区间为[p,q],则该行的灰度重心位置为:
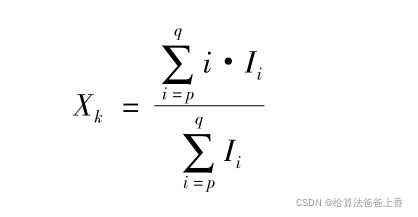
式中,I i 是第 i 个像素点的灰度值。
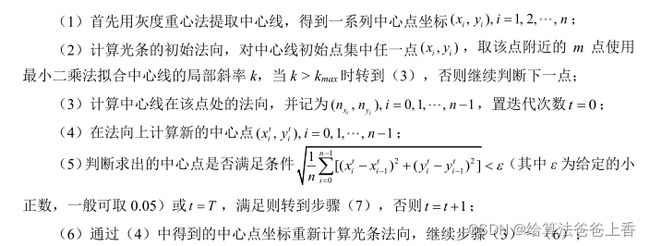
#include 法向质心法
#include Steger算法

#include 后续文章:中心线提取–GPU加速