山东大学机器学习实验六 K-Means
山东大学机器学习实验6报告
实验学时: 4 实验日期:2021.11.29
文章目录
- 山东大学机器学习实验6报告
-
- 实验题目:Experiment 6 : K-Means
- 实验目的
- 实验环境
-
- 软件环境
- 实验步骤与内容
-
-
- 了解K-Means
-
- K-Means (Lloyd 1957)
- Loss Function
- K-Means Objective
- Choosing K
- Task Description:
- Experimental steps :
-
- K-Means Algorithm
- Reassigning Colors to The Large Image
- Choosing A Good Initial Point
-
- 结论分析与体会
-
-
- K-Means 整体算法架构
- Some Limitations Of K-Means
- Kernel K-Means
- Hierarchical Clustering
-
- 实验源代码
实验题目:Experiment 6 : K-Means
实验目的
In this exercise, you will use K-means to compress an image by reducing the
number of colors it contains使用K-means 通过减少颜色的数量来压缩图像
实验环境
软件环境
Windows 10 + Matlab R2020a
CPU: Intel® Core™ i5-8300H CPU @ 2.30GHz 2.30 GHz
实验步骤与内容
了解K-Means
K-Means (Lloyd 1957)
-
更新每个点的Class K: 通过计算每个数据点 X i X_i Xi 到 每个类别中心点 μ k \mu_k μk的距离,来选择某点属于哪个类别

-
更新每个cluster means : 即根据当前这个类别的点,进行求mean操作,来得到中心点
-
当 μ k \mu_k μk或者Loss 不变时,认为迭代完成。
Loss:
Loss Function
μ k \mu_k μk认为是第K个聚类的质心, z i , k z_{i,k} zi,k认为是 x i x_i xi是否属于 C k C_k Ck的一个指示,然后对于每一条数据都会有一个 z i z_i zi,因此定义某个数据 x i x_i xi的 l o s s loss loss为:

总的 L o s s F u n c t i o n : Loss Function: LossFunction: 其中 X i s N × D X \, is \, N \times D\, XisN×D 然后 Z i s N × K 且 μ i s K × D Z\, is \, N \times K 且 \mu \, is \, K \times D ZisN×K且μisK×D

意思就是X表示所有D维数据,Z表示所有N个数据的聚类类别指示, μ \mu μ表示K个聚类的D维中心点。K-Means 就是去最小化这个Loss Function
K-Means Objective
K-Means 是一个启发式的方法,来解决这个NP-hard问题,并且他是一个Non-Convex problem,存在很多local minima
而算法描述为:

Choosing K
选择聚类的个数也是一个问题。
-
可以通过尝试不同的K值,画对于不同的K下的Loss图,选择elbow point 即可。
-
也可以使用AIC 来求解计算
Task Description:
Your task is to compute 16 cluster centroids from this image, with each centroid being a vector of length three that holds a set of RGB values.
计算16个聚类,每一个中心点都是一个 s i z e = 3 × 1 size = 3 \times 1 size=3×1的RGB p i x e l pixel pixel像素点 v a l u e value value表示RGB的值
鉴于计算 538 × 538 × 3 538 \times 538 \times 3 538×538×3的图片的中心点会耗时巨大,因此先在 小图片 ( 128 × 128 × 3 ) (128\times128\times3) (128×128×3)训练完之后,应用在大图片上,得到一个只使用16个color就表示的新图片
Experimental steps :
K-Means Algorithm
-
随机初始化: 从整个picture中随机选取16个pixel 作为初始化的迭代中心点。我采取的随机数方案可以实现不重复采样。
function code:
%% 随机选取初始点 return K * 3 function sample_Datas = sample_random(num,datas,dimx,dimy) % datas 为原始数据 num 为目标数目 sample_Datas = zeros(num,3); a = rand(dimx,1); b = rand(dimy,1); [vala,posa] = sort(a); [valb,posb] = sort(b); chose_x = posa(1:num,1); chose_y = posb(1:num,1); for i=1:num sample_Datas(i,:) = datas(chose_x(i),chose_y(i),:); end end -
计算每个Pixel的最邻近点: 遍历每个像素,每个pixel都有一个 R G B v e c t o r RGB \, vector RGBvector 并且 s i z e = 3 × 1 size = 3\times 1 size=3×1 然后和 所有中心点求距离,选最小距离对应的中心点的K 作为这个pixel的class
function code:
%% 计算每个pixel 的 类别 return Clusters: N * N val 为 类别 function Clusters = calculate_Ci(centroids,dimx,dimy,datas,K) Clusters = []; % 遍历每个pixel 计算一个z(i,j) for i= 1:dimy for j = 1:dimx % 得到xi pixel_rgb = [datas(i,j,1),datas(i,j,2),datas(i,j,3)]; diff = ones(K,1)*pixel_rgb - centroids; distance = sum(diff.^2,2); [~,class] = min(distance); % 得到最小的对应的类别的index Clusters(i,j) = class; end end end -
更新中心点 μ \mu μ 通过
Function code:
%% 更新中心点 return 16 * 3
function newcenters = updatemeans(Clusters,dimx,dimy,dimz,datas,K)
newcenters = zeros(K,dimz);
nums = zeros(K);
sumred = zeros(K,1);
sumgreen = zeros(K,1);
sumblue = zeros(K,1);
for i=1:dimx
for j=1:dimy
class = Clusters(i,j);
nums(class) = nums(class) + 1;
sumred(class) = sumred(class) + datas(i,j,1);
sumgreen(class) = sumgreen(class) + datas(i,j,2);
sumblue(class) = sumblue(class) + datas(i,j,3);
end
end
for i=1:K
if nums(i) ~= 0
sumred(i) = sumred(i) / nums(i);
sumgreen(i) = sumgreen(i) / nums(i);
sumblue(i) = sumblue(i) / nums(i);
end
end
newcenters = [sumred,sumgreen,sumblue];
newcenters = round(newcenters);
end
-
判断收敛:
我设定了最大收敛次数为150次,或者根据所有中心点更新前后的平方之和如果< 1 0 − 5 10^{-5} 10−5就认为是没变化了,收敛了。
编程实现上述过程,最后得到 每个像素点对应的** C l u s t e r s , s i z e = N × N Clusters,size = N \times N Clusters,size=N×N** 以及 每个中心点的RGB值: C e n t r o i d s , s i z e = K ∗ 3 Centroids,size = K*3 Centroids,size=K∗3
Reassigning Colors to The Large Image
在这里,我分别对小图和大图都进行了处理。
小图片:即对每个pixel 转化为 对应的class 的 RGB 值
大图片:首先计算每个pixel 和 训练出来的中心点的最临近点,然后更换RGB值,得到新图片。
随机一次初始值的效果:
小图片:

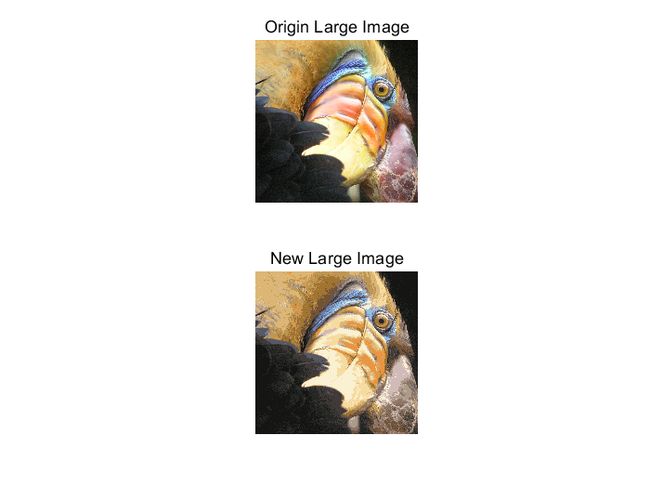
大图片:分辨率更高
Choosing A Good Initial Point
选择一个好的初始点,为此我对上述过程进行循环,设定次数。意在选一个比较好的初始点。
每次计算出最后的图片之后,与原图进行逐一pixel的rgb差值求解,然后对RGB进行平方均值,计算出Loss,得到最低loss 的图片
作为Best New Small / Large Image
效果如下:
小图片:

大图片:

与原图对比一下,效果不错:

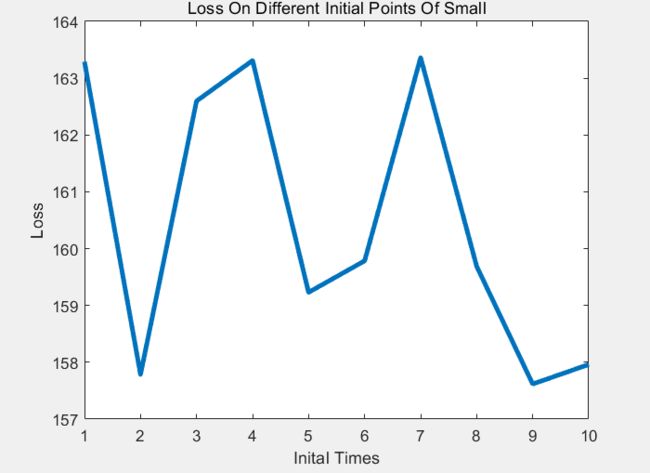
同时记录以下Loss 和 不同次进行随机初始的关系,画出图表:
可以看出:整体效果与初始点的初始有关系,可能存在Local Mininum
结论分析与体会
K-Means 整体算法架构
即:
每次固定中心点,然后更新每个点的类别
或者固定每个点的类别,据此来更新中心点位置信息
Some Limitations Of K-Means
K-Means 具有适用范围:
- 适用于每个cluster 规模差不多,此时效果会不错
- 在round-shaped 的效果好
同时在non-convex shaped 表现不好
Kernel K-Means
即进行高维映射,以此来解决non-convex问题。同时仍不会显式投影,而是用 K K K
Hierarchical Clustering
层次聚类,bottom-up、top-down
实验源代码
Lab61.m
clear,clc
%% K-means
% small_img : 128 * 128 * 3
% large_img : 538 * 538 * 3
small_img = imread('bird_small.tiff');
large_img = imread('bird_large.tiff');
% 转化为double 矩阵 A(50,33,3) 表示 y = 50 x =33 的Blue 的val
small_img_matrix = double(small_img);
large_img_matrix = double(large_img);
%% show image
% imshow(large_img)
%%
K = 16; % 16个class
[small_dimx,small_dimy,small_dimz] = size(small_img_matrix);
[large_dimx,large_dimy,large_dimz] = size(large_img_matrix);
max_iter_times = 200;
convergence_condition = 10^-5;
[centroids,Clusters] = kmeans(K,small_img_matrix,max_iter_times,convergence_condition);
%% 重新展示小图片
new_small_pic=[];
new_large_pic=[];
% 小图片处理
for i=1:small_dimx
for j=1:small_dimy
new_small_pic(i,j,:) = centroids(Clusters(i,j),:);
end
end
% 大图片处理
for i=1:large_dimy
for j=1:large_dimy
pixel_rgb = [large_img_matrix(i,j,1),large_img_matrix(i,j,2),large_img_matrix(i,j,3)];
diff = ones(K,1)*pixel_rgb - centroids;
distance = sum(diff.^2,2);
[~,class] = min(distance); % 得到类别
new_large_pic(i,j,:) = centroids(class,:);
end
end
%% 展示小图片 和 大图片
figure
subplot(2,1,1);
imshow(uint8(small_img_matrix)),title('Origin Small Image');
subplot(2,1,2);
imshow(uint8(new_small_pic)),title('New Small Image')
%%
figure
subplot(2,1,1);
imshow(uint8(large_img_matrix)),title('Origin Large Image');
subplot(2,1,2);
imshow(uint8(new_large_pic)),title('New Large Image')
%% K-Means Fuction Return ?
function [centroids,Clusters] = kmeans(K,datas,max_iter_times,convergence_condition)
% 返回中心点 K * dimz
centroids = [];
[dimy,dimx,dimz] = size(datas);
% 随机初始化中心点 K*3
centroids = sample_random(K,datas,dimx,dimy);
for it = 1 : max_iter_times
% 计算its nearest mean
Clusters = calculate_Ci(centroids,dimx,dimy,datas,K);
% 更新中心点
new_centroids = updatemeans(Clusters,dimx,dimy,dimz,datas,K);
% 看是否收敛
convergence = judge(new_centroids,centroids,convergence_condition);
centroids = new_centroids;
if convergence
break
end
end
end
%% 随机选取初始点 return K * 3
function sample_Datas = sample_random(num,datas,dimx,dimy)
% datas 为原始数据 num 为目标数目
sample_Datas = zeros(num,3);
a = rand(dimx,1);
b = rand(dimy,1);
[vala,posa] = sort(a);
[valb,posb] = sort(b);
chose_x = posa(1:num,1);
chose_y = posb(1:num,1);
for i=1:num
sample_Datas(i,:) = datas(chose_x(i),chose_y(i),:);
end
end
%% 计算每个pixel 的 类别 return Clusters: N * N val 为 类别
function Clusters = calculate_Ci(centroids,dimx,dimy,datas,K)
Clusters = [];
% 遍历每个pixel 计算一个z(i,j)
for i= 1:dimy
for j = 1:dimx
% 得到xi
pixel_rgb = [datas(i,j,1),datas(i,j,2),datas(i,j,3)];
diff = ones(K,1)*pixel_rgb - centroids;
distance = sum(diff.^2,2);
[~,class] = min(distance); % 得到最小的对应的类别的index
Clusters(i,j) = class;
end
end
end
%% 更新中心点 return 16 * 3
function newcenters = updatemeans(Clusters,dimx,dimy,dimz,datas,K)
newcenters = zeros(K,dimz);
nums = zeros(K);
sumred = zeros(K,1);
sumgreen = zeros(K,1);
sumblue = zeros(K,1);
for i=1:dimx
for j=1:dimy
class = Clusters(i,j);
nums(class) = nums(class) + 1;
sumred(class) = sumred(class) + datas(i,j,1);
sumgreen(class) = sumgreen(class) + datas(i,j,2);
sumblue(class) = sumblue(class) + datas(i,j,3);
end
end
for i=1:K
if nums(i) ~= 0
sumred(i) = sumred(i) / nums(i);
sumgreen(i) = sumgreen(i) / nums(i);
sumblue(i) = sumblue(i) / nums(i);
end
end
newcenters = [sumred,sumgreen,sumblue];
newcenters = round(newcenters);
end
%% 判断是否收敛
function convergence = judge(newcenter,oldcenter,condition)
convergence = 0;
d = sum(sqrt(sum((newcenter - oldcenter).^2, 2)));
if d < condition
convergence = 1;
end
end
%% 返回行列坐标
function [row,col] = findrc(Clusters,val)
[dimx,dimy] = size(Clusters);
row = [];
col = [];
for i=1:dimx
for j=1:dimy
if Clusters(i,j) == val
row = [row;i];
col = [col;j];
end
end
end
end
Lab62.m (多次迭代选最好效果)
clear,clc %% 多进行几次,目的是初始点不同,找一个效果最好的。 %% K-means % small_img : 128 * 128 * 3 % large_img : 538 * 538 * 3 small_img = imread('bird_small.tiff'); large_img = imread('bird_large.tiff'); % 转化为double 矩阵 A(50,33,3) 表示 y = 50 x =33 的Blue 的val small_img_matrix = double(small_img); large_img_matrix = double(large_img); Best_new_small_pic=[]; Best_new_large_pic=[]; %% show image % imshow(large_img) %% inital_times = 10; for inital_time = 1 : inital_times K = 16; % 16个class [small_dimx,small_dimy,small_dimz] = size(small_img_matrix); [large_dimx,large_dimy,large_dimz] = size(large_img_matrix); max_iter_times = 200; convergence_condition = 10^-5; [centroids,Clusters] = kmeans(K,small_img_matrix,max_iter_times,convergence_condition); %% 重新展示小图片 loss_small = 1e9; loss_large = 1e9; new_small_pic=[]; new_large_pic=[]; % 小图片处理 for i=1:small_dimx for j=1:small_dimy new_small_pic(i,j,:) = centroids(Clusters(i,j),:); end end new_loss_small = calculate_Kmeans_Loss(small_img_matrix,new_small_pic,small_dimx,small_dimy); if new_loss_small < loss_small loss_small = new_loss_small; Best_new_small_pic = new_small_pic; end % 大图片处理 for i=1:large_dimy for j=1:large_dimx pixel_rgb = [large_img_matrix(i,j,1),large_img_matrix(i,j,2),large_img_matrix(i,j,3)]; diff = ones(K,1)*pixel_rgb - centroids; distance = sum(diff.^2,2); [~,class] = min(distance); % 得到类别 new_large_pic(i,j,:) = centroids(class,:); end end new_loss_large = calculate_Kmeans_Loss(large_img_matrix,new_large_pic,large_dimy,large_dimx); if new_loss_large < loss_large loss_large = new_loss_large; Best_new_large_pic = new_large_pic; end end %% 展示小图片 和 大图片 figure subplot(2,1,1); imshow(uint8(small_img_matrix)),title('Origin Small Image'); subplot(2,1,2); imshow(uint8(Best_new_small_pic)),title('Best New Small Image') imwrite(uint8(Best_new_small_pic),'Best New Small Image.png') figure subplot(2,1,1); imshow(uint8(large_img_matrix)),title('Origin Large Image'); subplot(2,1,2); imshow(uint8(Best_new_large_pic)),title('Best New Large Image') imwrite(uint8(Best_new_large_pic),'Best New Large Image.png') %% K-Means Fuction Return ? function [centroids,Clusters] = kmeans(K,datas,max_iter_times,convergence_condition) % 返回中心点 K * dimz centroids = []; [dimy,dimx,dimz] = size(datas); % 随机初始化中心点 K*3 centroids = sample_random(K,datas,dimx,dimy); for it = 1 : max_iter_times % 计算its nearest mean Clusters = calculate_Ci(centroids,dimx,dimy,datas,K); % 更新中心点 new_centroids = updatemeans(Clusters,dimx,dimy,dimz,datas,K); % 看是否收敛 convergence = judge(new_centroids,centroids,convergence_condition); centroids = new_centroids; if convergence break end end end %% 随机选取初始点 return K * 3 function sample_Datas = sample_random(num,datas,dimx,dimy) % datas 为原始数据 num 为目标数目 sample_Datas = zeros(num,3); a = rand(dimx,1); b = rand(dimy,1); [vala,posa] = sort(a); [valb,posb] = sort(b); chose_x = posa(1:num,1); chose_y = posb(1:num,1); for i=1:num sample_Datas(i,:) = datas(chose_x(i),chose_y(i),:); end end %% 计算每个pixel 的 类别 return Clusters: N * N val 为 类别 function Clusters = calculate_Ci(centroids,dimx,dimy,datas,K) Clusters = []; % 遍历每个pixel 计算一个z(i,j) for i= 1:dimy for j = 1:dimx % 得到xi pixel_rgb = [datas(i,j,1),datas(i,j,2),datas(i,j,3)]; diff = ones(K,1)*pixel_rgb - centroids; distance = sum(diff.^2,2); [~,class] = min(distance); % 得到最小的对应的类别的index Clusters(i,j) = class; end end end %% 更新中心点 return 16 * 3 function newcenters = updatemeans(Clusters,dimx,dimy,dimz,datas,K) newcenters = zeros(K,dimz); nums = zeros(K); sumred = zeros(K,1); sumgreen = zeros(K,1); sumblue = zeros(K,1); for i=1:dimx for j=1:dimy class = Clusters(i,j); nums(class) = nums(class) + 1; sumred(class) = sumred(class) + datas(i,j,1); sumgreen(class) = sumgreen(class) + datas(i,j,2); sumblue(class) = sumblue(class) + datas(i,j,3); end end for i=1:K if nums(i) ~= 0 sumred(i) = sumred(i) / nums(i); sumgreen(i) = sumgreen(i) / nums(i); sumblue(i) = sumblue(i) / nums(i); end end newcenters = [sumred,sumgreen,sumblue]; newcenters = round(newcenters); end %% 判断是否收敛 function convergence = judge(newcenter,oldcenter,condition) convergence = 0; d = sum(sqrt(sum((newcenter - oldcenter).^2, 2))); if d < condition convergence = 1; end end %% 计算K-Means 之后的图片的loss:计算所有pixel的rgb sum 然后 avg function Loss1 = calculate_Kmeans_Loss(ori_img,new_img,dimx,dimy) Loss = zeros(3,1); div_num = dimx*dimy; for i=1:dimx for j = 1 :dimy Loss(1) = Loss(1) + (ori_img(i,j,1)-new_img(i,j,1)).^2 / div_num; Loss(2) = Loss(2) + (ori_img(i,j,2)-new_img(i,j,2)).^2 / div_num; Loss(3) = Loss(3) + (ori_img(i,j,3)-new_img(i,j,3)).^2 / div_num; end end Loss1 = sum(Loss) / 3; end
n
convergence = 1; endend
%% 计算K-Means 之后的图片的loss:计算所有pixel的rgb sum 然后 avg
function Loss1 = calculate_Kmeans_Loss(ori_img,new_img,dimx,dimy)
Loss = zeros(3,1);
div_num = dimx*dimy;
for i=1:dimx
for j = 1 :dimy
Loss(1) = Loss(1) + (ori_img(i,j,1)-new_img(i,j,1)).^2 / div_num;
Loss(2) = Loss(2) + (ori_img(i,j,2)-new_img(i,j,2)).^2 / div_num;
Loss(3) = Loss(3) + (ori_img(i,j,3)-new_img(i,j,3)).^2 / div_num;
end
end
Loss1 = sum(Loss) / 3;
end