视觉SLAM十四讲学习第一部分(ch1-ch6)
Debug过程中遇到的问题
0、写在前言
题头诗:
初尝视觉SLAM,代码头挠秃
代码好在哪,看完云雾里
度娘google来回切,方知知易行难
这篇Debug的记录是按照章节组织的,内容包括但不限于如下的内容:
- 环境配置
- 代码解析
- 运行报错
- 其他杂项
每一个内容讲述的要点我都在小标题里有比较详细的说明,可以先查看目录看看是否有你遇到的疑问。
一、ch3
1. 运行报错:cannot find trajectory file at trajectory.txt
这个问题出现的原因在于,cmake过后的文件路径是从cmake文件出发的,可以看我利用以下代码输出的当前路径,路径输出代码如下:
char *buffer;
//也可以将buffer作为输出参数
if((buffer = getcwd(NULL, 0)) == NULL)
{
perror("getcwd error");
}
else
{
printf("%s\n", buffer);
free(buffer);
}
而输出的结果为:
/home/zhuhj/slambook2/ch3/cmake-build-debug/examples
PS:因为我使用的clion生成的项目,所以build名称是cmake-build-debug
所以,直接针对cpp文件来写相对路径的思路是不对的,正确的相对路径应为:
string trajectory_file = "../../examples/trajectory.txt"; //后退两次
2. 代码解析:vector>
vector
这是因为,对eigen中的固定大小的类使用STL容器的时候,如果直接使用会出错,向量化时必须要求向量明确给定出需要分配的内存大小。(而int,char这些是c++自己定义好的,所以我们平常写的时候忽略了这一部分),所以aligned_allocator在做一件事,告诉vector容器Isometry3d的内存大小。
3. pangolin画图解析
首先是pangolin的初始化配置
// 创建绘图窗口
pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768);
// 启动深度检测(即遮掩物体将被剔除)
glEnable(GL_DEPTH_TEST);
// 启用混合(色块在同一像素点下以叠加方式处理而不是覆盖),只能适用于RGB模式
glEnable(GL_BLEND);
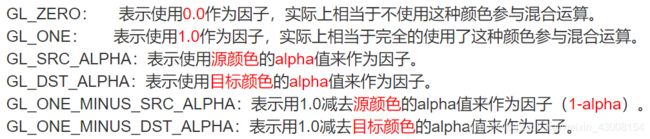
// 设置混合时源因子与目标因子间的混合权重
// 混合方式与两个参数的意义见下表
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
// 创建一个观测相机视图(类比unity的主视角)
pangolin::OpenGlRenderState s_cam(
// ProjectionMatrix-投影矩阵,六个参数分别为(left, right, bottom, top, near和far边界值)
//near和far就代表着相机可拉伸的深度
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
// ModelViewLookAt 定义观测方向向量
// (0,-0.1,-1.8) - 观测点位置:(mViewpointX mViewpointY mViewpointZ)
// (0,0,0) 观测目标位置
// (0.0,-1.0,0.0) 观测的方位向量
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
// 定义地图面板
// SetBound最后一个参数(-1024.0f/768.0f)为显示长宽比
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, 0.0, 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
然后是根据传入的vector进行绘图
while (pangolin::ShouldQuit() == false) {
// 清图
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
// 设定摄像机
d_cam.Activate(s_cam);
// 设定颜色、线宽
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glLineWidth(2);
for (size_t i = 0; i < poses.size(); i++) {
// 画每个位姿的三个坐标轴
// 获得平移向量
// 对于一个机器人来说,平移向量就代表着从世界坐标轴原点移动到当前坐标轴原点
Vector3d Ow = poses[i].translation();
// 获得坐标轴变换向量
// 原点受平移向量影响,当前坐标轴则受旋转和平移同时影响,将世界坐标轴乘以变换矩阵就可以得到变换后的坐标轴
// 旋转后的坐标轴就构成了机器人的观测维(一般依据的是相机的变换而建立得到),观测维观测到的结果是在其当前坐标系下的结果,可以反变换映射到世界坐标系
Vector3d Xw = poses[i] * (0.1 * Vector3d(1, 0, 0));
Vector3d Yw = poses[i] * (0.1 * Vector3d(0, 1, 0));
Vector3d Zw = poses[i] * (0.1 * Vector3d(0, 0, 1));
glBegin(GL_LINES);
// 设定RGB颜色
glColor3f(1.0, 0.0, 0.0);
// 画连线
glVertex3d(Ow[0], Ow[1], Ow[2]);
glVertex3d(Xw[0], Xw[1], Xw[2]);
glColor3f(0.0, 1.0, 0.0);
glVertex3d(Ow[0], Ow[1], Ow[2]);
glVertex3d(Yw[0], Yw[1], Yw[2]);
glColor3f(0.0, 0.0, 1.0);
glVertex3d(Ow[0], Ow[1], Ow[2]);
glVertex3d(Zw[0], Zw[1], Zw[2]);
glEnd();
}
// 画出连线
for (size_t i = 0; i < poses.size(); i++) {
glColor3f(0.0, 0.0, 0.0);
glBegin(GL_LINES);
auto p1 = poses[i], p2 = poses[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
二、ch4
1. 环境配置:sophus版本有问题
slambook2代码提供的sophus直接cmake是有问题的,可以直接去git仓库下载下来,这个版本是正确无误的(前提是安装好eigen3库且版本在3.3以上)
Eigen3的版本可以去以下路径查看:
/usr/include/eigen3/Eigen/src/Core/util/Macros.h
// 版本信息
#define EIGEN_WORLD_VERSION 3
#define EIGEN_MAJOR_VERSION 3
#define EIGEN_MINOR_VERSION 7
// 这表示当前版本是3.3.7
sophus从git仓库备份下来的方式就是常见的那一套,如下所示:
// 因为备份时会自动新建Sophus文件夹,不需要提前新建
git clone https://github.com/strasdat/Sophus.git
cd ./Sophus/
mkdir build
cd ./build
cmake ..
make
sudo make install
这样就会在usr/local/include下新建好一个包含sophus头文件的文件夹,但是请注意,到这一步还不算完成,直接编译ch4的代码会报一个严重的错误:
Fatal error !! cannot find <fmt/core.h>
是的,这是因为缺少fmt头文件导致的,所以还需要去git下载编译fmt
git clone https://github.com/fmtlib/fmt.git
(PS: 如果github上不去,可以复制该链接,到码云中去找相同的仓库,然后再用码云相同仓库的链接替换即可:https://gitee.com/leizh74/fmt.git)
cd ./fmt
mkdir build
cmake ..
make
sudo make install
但是,实际使用过程中,如果直接编译ch4未做任何修改,你还会获得如下报错
/usr/bin/ld: CMakeFiles/useSophus.dir/useSophus.cpp.o: in function `std::make_unsigned<int>::type fmt::v7::detail::to_unsigned<int>(int)':
/usr/local/include/fmt/core.h:396: undefined reference to `fmt::v7::detail::assert_fail(char const*, int, char const*)'
/usr/bin/ld: CMakeFiles/useSophus.dir/useSophus.cpp.o: in function `fmt::v7::format_error::format_error(char const*)':
/usr/local/include/fmt/format.h:798: undefined reference to `vtable for fmt::v7::format_error'
/usr/bin/ld: CMakeFiles/useSophus.dir/useSophus.cpp.o: in function `fmt::v7::detail::throw_format_error(char const*)':
/usr/local/include/fmt/format.h:832: undefined reference to `fmt::v7::format_error::~format_error()'
这样的报错一般是由于libraray文件路径未指定/未导入,所以还需要再CMakelist.txt文件中,指定链接fmt库(注意,在target_link_libraries中,应遵循调用层次,从依赖到被依赖,比如这里useSophus依赖于Sophus,Sophus依赖于fmt)
target_link_libraries(useSophus ${Sophus_LIBRARIES} fmt)
这样,ch4的代码已经可以完整运行了
另外,如果你报fmt::v8的错误,那就是你fmt版本太高了,和sophus不匹配的原因(使用我给的链接不会存在这个问题,只是记录一下这个问题)
2. 代码解析:sophus下李群和李代数的转换
sophus下李群和李代数的转换与真实代数下是有区别的,真实代数下,李代数不是做一一次指数运算直接变成的李群,而是先转换成反对称矩阵,再由反对称矩阵做矩阵的指数运算转换成李群;同理,李群转换成李代数也是先做矩阵的对数运算,再由反对称矩阵转换到李代数。
而在sophus下,不需要我们去完成反对称矩阵与向量间的转换,这简化了中间的操作:
// 李代数到李群
Vector3d so3(1,0,0);
Sophus::SO3d SO3=Sophus::SO3d::exp(so3); //这里需指明exp的来源,避免出现误解
// 李群到李代数
Vector3d result=SO3.log()
三、ch5
1. 环境配置:安装opencv的前置依赖项出现的一系列问题
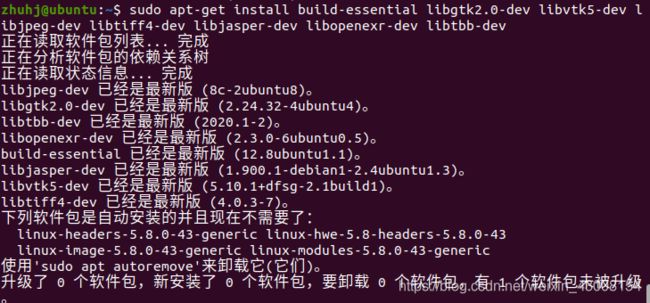
写书时不注意细节,给安装者带来了太多的问题啊,书里给出的前置依赖项安装如下代码所示:
sudo apt−get install build−essential libgtk2.0−dev libvtk5−dev libjpeg−dev libtiff4−dev libjasper−dev libopenexr−dev libtbb−dev
直接用该代码安装,会报apt-get不存在,其实在报这个错的时候我就应该发现的,那就是这行代码有着一个严重的错误,“-”号用的是中文全角,ubuntu无法识别!将全角符号全部替换,正确的代码如下:
sudo apt-get install build-essential libgtk2.0-dev libvtk5-dev libjpeg-dev libtiff4-dev libjasper-dev libopenexr-dev libtbb-dev
无法找到apt-get以及无法找到安装包的问题解决(还查找了一些相关资料,有说无法找到包的原因是安装源版本低,需要更新,参考:链接地址,这也会是无法找到安装包的可能原因,但本文不是这个原因)
之后会遇到libvtk5-dev的报错如下:
下列软件包有未满足的依赖关系:
libvtk5-dev : 依赖: libqt4-dev 但是它将不会被安装
依赖: libvtk5.10 (= 5.10.1+dfsg-2.1build1) 但是它将不会被安装
需要注意的是,这个问题不是前置安装包缺失,而是同名安装包的版本过高,libvtk无法完成依赖,这种情况,我们可以使用aptitude来处理这个问题,它可以一键完成高版本依赖包的删除以及需要的低版本依赖包安装,具体的处理代码如下:
sudo apt-get install aptitude
sudo aptitude install libvtk5-dev
注意的是,aptitude可以给出多个方案(但是是一个一个给出),最开始给出的方案比较保守,对于缺乏的依赖都是采取[不安装]的处理办法,遇到这种情况选择n否定该方案,直到aptitude给出不包含[不安装]的处理方案,选择y确定
这个过程中可能出现bug,我们可以再度运行sudo apt-get install XXX(也就是本段第二句代码)查看有哪些安装完毕,有哪些还有问题,并不断使用aptitude更改有问题的安装包,直到sudo apt-get install XXX后反馈如下:
则表明所有的依赖均安装完毕
2. 环境配置:安装opencv
在编译opencv的cmake工程时,出现了fatal error,报错说缺乏

可以看到,该头文件在安装vtk6之后,已经可以成功查询到!
之后再重新make没有问题,再sudo make install后可以在usr/local/include中看到已经生成了opencv头文件库
3. 其他杂项:运行imageBasics
在运行之前,我想首先对c++main函数的argc和argv参数进行讲解,讲解内容来源于博客:地址
首先是int argc参数,argc参数表示命令行中参数的个数,其值是在输入命令时由系统按实际参数的个数自动赋值的
然后是char **argv参数,argv参数是字符串指针数组,存放命令行中的参数,长度即为参数个数argc
这是在调用可执行程序时,由命令行附加给main函数的,例如本例中的调用程序以及附加参数的代码如下:
build/imageBasics ubuntu.png xxx.png //同时附上两个图片的地址(可相对也可绝对)中间以空格隔开
而如果使用IDE,例如我使用的是CLION,又该如何完成这一附加操作?
以下内容来源于博客:地址
1、在顶部菜单栏的run中找到Edit configurations
2、在左侧选择配置的项目,如本例imageBasics
3、在 Working directory 选择运行路径(本例直接选择了图片所在文件夹)
4、在Program arguments输入参数(本例为两张图片具体路径,从上一步的设置出发,可以直接写相对路径“ ./ ”确定图片位置即可),多个参数通过空格隔开
5、点击apply并run即可
最终配置如下图所示:

4. 代码解析:stereoVision重要代码句解析
stereoVision算法的目的是实现双目视觉下的点云地图生成(即3维深度地图),这里我们对stereoVision.cpp中比较重要的一些代码进行解读:
sgbm->compute(left, right, disparity_sgbm); //通过sgbm方法生成视差矩阵
解析:
1、 视差是左右视图中描述相同现实物体的像素间的差
2、 视差可以直接反应深度(通过相似三角形),视差越大距离越近
3、 sgbm是一种计算视差图的方法,更为简单的计算视差图方法还有SAD
4、 视差图就是以某一图为基准(一般以左视图),矩阵大小为图大小,矩阵值为像素对应视差
5、 sgbm计算视差图是一种全局匹配的思想,保证在所有像素匹配误差最小的情况下计算视差
6、 SAD则是一种局部匹配思想,所以其计算速度更快,准确率要低一些
disparity_sgbm.convertTo(disparity, CV_32F, 1.0 / 16.0f); //将生成的16位整形MAT转换成32位浮点型MAT,除以16得到真实视差值
解析:
之所以除以16,是因为SGBM在计算时以16位整形存储,为了保证精度,扩大了16倍(多保留4bit),所以在还原成浮点型时,需要除以16
5. 代码解析:joinMap重要代码解析
Sophus::SE3d T = poses[i]; //poses存储的机器人到世界坐标的位姿变换(T_RW取逆)
这一部分内容可以参看三维空间刚体运动时的小萝卜的例子,这里的T是T_WR,也就是从机器人坐标系到世界坐标系的变换向量。
Eigen::Vector3d pointWorld = T * point; // 可能出现多张图观测到世界坐标系下同一点,将通过色块混合处理重复
当同一三维空间点被多张图同时观测到,将通过色块融合处理重复(这是在pangolin中设置的)