强化学习相关概念梳理
强化学习相关概念梳理
强化学习概念特别多,且涉及大量数学知识,此文章旨在梳理一些基本概念,如有错误,欢迎指正!
目录
- 强化学习的基本组成元素
- 马尔科夫决策过程(MDP)
- 贝尔曼方程
正文
1.强化学习的基本组成元素
为了便于理解,举一个爷青回的例子:超级玛丽,相信大家都玩过!

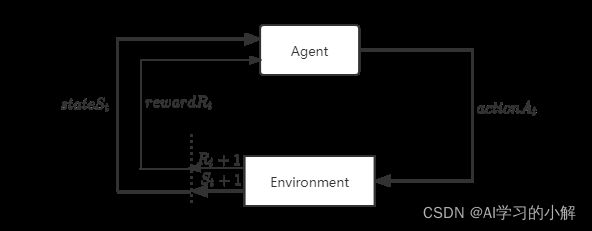
- agent(智能体):强化学习的本体,作为学习者或决策者存在。例如上图中的马里奥。
- environment(环境):agent以外的一切,主要指状态。例如上图的马里奥游戏环境。
- state(状态):记为S,表示environment的数据,例如马里奥游戏的一帧。状态集是environment中所有可能的state。
- action(动作):记为A,agent所能执行的操作。例如图中马里奥智能执行up,left,right。动作集是agent所能做出的所有动作。
- policy(策略):记为π,从state到action的映射,agent基于某种state选择某种action的过程。根据观测到的state,做出决策,控制agent运动。公式如下:
π ( a ∣ s ) = P ( A = a ∣ S = s ) π(a | s) = P(A = a | S = s) π(a∣s)=P(A=a∣S=s)
实际上 π ( a ∣ s ) π(a | s) π(a∣s) 是一个 概率密度函数,即:给定状态s,做出动作a的概率密度
eg:
π ( l e f t ∣ s ) = 0.2 π(left | s) = 0.2 π(left∣s)=0.2 , 20%的可能性朝左走
π ( r i g h t ∣ s ) = 0.1 π(right | s) = 0.1 π(right∣s)=0.1, 10%的可能性朝右走
π ( u p ∣ s ) = 0.7 π(up | s) = 0.7 π(up∣s)=0.7, 70%的可能性朝上走
在state S = s时,agent的动作是随机的。
- reward(奖励):记为R,agent在执行一个动作后,获得的正负奖励信号。
eg:如上图马里奥游戏中:
收集到金币:R = + 1
赢得游戏:R = + 10000
碰到敌人(game over):R = - 10000
无事发生:R = 0
这些奖励都是根据实际情况认为设计的。
- state transition(状态转移):
p ( s ′ , r ∣ s , a ) = P ( S t + 1 = s ′ , R t + 1 = r ∣ S t = s , A t = a ) p(s^{'}, r | s, a)=P(S_{t+1} = s^{'},R_{t+1}= r | S_{t} = s,A_{t} = a) p(s′,r∣s,a)=P(St+1=s′,Rt+1=r∣St=s,At=a)
从式子中可以看出t+1时刻的状态s’,和奖励r是由t时刻的状态s和执行的动作a决定的。是一个 条件概率密度函数
注意:
1.状态转移可以是确定的,也可以是随机的,通常都是随机的。例如多臂赌博机中就是确定的,马里奥游戏中就是不确定的。
2.状态转移的随机性来源于环境内部。例如马里奥游戏中,当前状态执行一个动作后,下一个状态是由游戏内部机制所决定的。
- rerurn(未来的累计奖励):记为U(也有的记为G),未来所有时刻的总回报。公式如下:
U t = R t + 1 + γ R t + 2 + γ 2 R t + 3 + γ 3 R t + 4 + . . . U_{t} = R_{t+1} + \gamma R_{t+2} + \gamma^{2} R_{t+3} + \gamma^{3} R_{t+4} + ... Ut=Rt+1+γRt+2+γ2Rt+3+γ3Rt+4+...
其中, γ \gamma γ为折扣率, γ ∈ [ 0 , 1 ] \gamma\in[0,1] γ∈[0,1],因为时间越久远的回报对当前的回报价值越低,就比如说,你今天掉了一百块钱,可能会影响你中午的伙食(钱丢了,少吃一点),但对100天后的你来说,之前丢的一百块钱并不算什么。
强化学习的目标:获得的累计奖励要尽可能高!!!
2.马尔科夫决策过程(MDP)
- MDP是在环境中模拟智能体的随机性策略(policy)与回报的数学模型,且环境的状态具有马尔可夫性质。
- 马尔可夫性质:也叫后无效性,指在时间步t+1时,环境的反馈仅取决于上一时间步t的状态s和动作a,与时间步t-1及t-1步之前的时间步都没有关联性。马尔科夫性是一种为了简化问题而做的假设。
具体过程如下图:
马尔科夫过程可表示为一个五元组:
M D P ( S , A , P , R , γ ) MDP(S, A, P, R, γ ) MDP(S,A,P,R,γ)
其中S为状态,A为动作,P为状态转移概率,R为奖励, γ \gamma γ为折扣率
基本流程如下:
其中,T为终止时间步数。
MDP会产生一个状态-动作-奖励序列:
s 0 , a 0 , r 1 , s 1 , a 1 , r 2 , s 2 , a 2 , r 3 , … , s t , a t , r t + 1 , … , s T − 1 , a T − 1 , r T , s T s_{0}, a_{0}, r_{1}, s_{1}, a_{1}, r_{2}, s_{2}, a_{2}, r_{3}, …, s_{t}, a_{t}, r_{t+1}, …, s_{T-1}, a_{T-1}, r_{T}, s_{T} s0,a0,r1,s1,a1,r2,s2,a2,r3,…,st,at,rt+1,…,sT−1,aT−1,rT,sT
累计奖励为: G t = R t + 1 + γ R t + 2 + γ 2 R t + 3 + γ 3 R t + 4 + . . . G_{t} = R_{t+1} + \gamma R_{t+2} + \gamma^{2} R_{t+3} + \gamma^{3} R_{t+4} + ... Gt=Rt+1+γRt+2+γ2Rt+3+γ3Rt+4+...
目标:使累计奖励最大。
下面举一个例子将上述l两部分概念捋一遍:
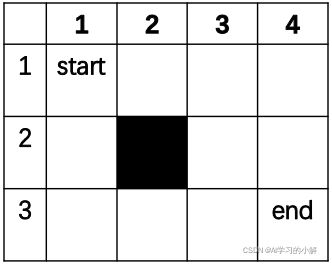
机器人在如下表格中走路,障碍为(2,2)的格子,机器人碰到墙或障碍物会保持不动。机器人初始状态为格子(1,3),若机器人走到格子(3,4),则过程结束。
- 状态集合:由11个状态构成,分别为除障碍物外的每一个格子
S = { ( 1 , 1 ) , ( 1 , 2 ) , . . . , ( 3 , 4 ) } S=\left \{ (1, 1), (1, 2), ..., (3, 4) \right \} S={(1,1),(1,2),...,(3,4)}- 动作集合:由4个动作组成,每个移动方向为一个动作
A = { u p , d o w n , l e f t , r i g h t } A = \left \{ up, down, left, right \right \} A={up,down,left,right}- 状态转移概率:由于机器人轮子打滑等原因,即便给出的动作命令是down,机器人也会以0.1的概率分别执行left或right,比如当机器人处在状态(1, 3),被要求执行动作down时,我们有:
P ( 1 , 3 ) , d o w n ( ( 2 , 3 ) ) = 0.8 P_{(1, 3),down}((2, 3)) = 0.8 P(1,3),down((2,3))=0.8 在状态(1, 3)执行动作down时,转移到状态(2, 3)的概率为0.8
P ( 1 , 3 ) , l e f t ( ( 1 , 2 ) ) = 0.1 P_{(1, 3),left}((1, 2)) = 0.1 P(1,3),left((1,2))=0.1
P ( 1 , 3 ) , r i g h t ( ( 1 , 4 ) ) = 0.1 P_{(1, 3),right}((1, 4)) = 0.1 P(1,3),right((1,4))=0.1- 奖励函数:
R ( ( 2 , 3 ) , d o w n , ( 3 , 3 ) ) = 0 R((2, 3), down, (3, 3)) = 0 R((2,3),down,(3,3))=0 在状态(2, 3)执行动作down,到达状态(3, 3),所得到的奖励为0
R ( ( 3 , 3 ) , l e f t , ( 3 , 4 ) ) = 1 R((3, 3), left, (3, 4)) = 1 R((3,3),left,(3,4))=1 在状态(3, 3)执行动作left,到达状态(3, 4),所得到奖励为1,因为到达了终点- 折扣因子:
γ ∈ [ 0 , 1 ] γ \in [0, 1] γ∈[0,1]- MDP序列:
s 0 , a 0 , r 1 , s 1 , a 1 , r 2 , s 2 , a 2 , r 3 , … , s T − 1 , a T − 1 , r T , s T s_{0}, a_{0}, r_{1}, s_{1}, a_{1}, r_{2}, s_{2}, a_{2}, r_{3}, …, s_{T-1}, a_{T-1}, r_{T}, s_{T} s0,a0,r1,s1,a1,r2,s2,a2,r3,…,sT−1,aT−1,rT,sT- 累计奖励:
G 0 = r 1 + γ r 2 + γ 2 r 3 + γ 3 r 4 + . . . + γ T − 1 r T G_{0} = r_{1} + \gamma r_{2} + \gamma^{2} r_{3} + \gamma^{3} r_{4} + ... +\gamma^{T-1} r_{T} G0=r1+γr2+γ2r3+γ3r4+...+γT−1rT
3.贝尔曼方程

- Value Function(价值函数):定义如下:
V π ( s ) = E π [ G t ∣ S t = s ] V_{π}(s) = E_{π}[G_{t} | S_{t} = s] Vπ(s)=Eπ[Gt∣St=s]
其中, G t = R t + 1 + γ R t + 2 + γ 2 R t + 3 + γ 3 R t + 4 + . . . G_{t} = R_{t+1} + \gamma R_{t+2} + \gamma^{2} R_{t+3} + \gamma^{3} R_{t+4} + ... Gt=Rt+1+γRt+2+γ2Rt+3+γ3Rt+4+...
解释:在当前状态已知的情况改下,采取策略π,所获得的累计奖励的期望。为什么是期望呢?
如上图的回溯图,当状态 S t = s S_{t} = s St=s时,根据策略函数 π ( a ∣ s ) π(a | s) π(a∣s),会执行动作 a 1 , a 2 , a 3 a_{1},a_{2},a_{3} a1,a2,a3中的一个(由于策略函数π是个概率密度函数,所以这三个动作都有被执行的可能);在选择执行哪个动作之后,再根据状态转移函数 p ( s ′ , r ∣ s , a ) p(s^{'}, r | s, a) p(s′,r∣s,a)得到下一个状态 s ′ s^{'} s′,并获得奖励 r t r_{t} rt,由于状态转移函数也是概率密度函数,此过程也是随机的, s 1 , s 2 , s 3 s_{1},s_{2},s_{3} s1,s2,s3都有被执行的可能。由于以上这些随机性,用期望的形式才能更好的表示价值函数。
价值函数还可以化简如下:
V π ( s ) = E π [ G t ∣ S t = s ] V_{π}(s) = E_{π}[G_{t} | S_{t} = s] Vπ(s)=Eπ[Gt∣St=s]
= E π [ R t + 1 + γ R t + 2 + γ 2 R t + 3 + γ 3 R t + 4 + . . . ∣ S t = s ] = E_{π}[R_{t+1} + \gamma R_{t+2} + \gamma^{2} R_{t+3} + \gamma^{3} R_{t+4} + ...| S_{t} = s] =Eπ[Rt+1+γRt+2+γ2Rt+3+γ3Rt+4+...∣St=s]
= E π [ R t + 1 + γ ( R t + 2 + γ R t + 3 + γ 2 R t + 4 + . . . ) ∣ S t = s ] = E_{π}[R_{t+1} + \gamma (R_{t+2} + \gamma R_{t+3} + \gamma^{2} R_{t+4} + ...)| S_{t} = s] =Eπ[Rt+1+γ(Rt+2+γRt+3+γ2Rt+4+...)∣St=s]
= E π [ R t + 1 + γ G t + 1 ∣ S t = s ] =E_{π}[R_{t+1} + \gamma G_{t+1}| S_{t} = s] =Eπ[Rt+1+γGt+1∣St=s]
= ∑ a π ( a ∣ s ) ∑ s ′ ∑ r p ( s ′ , r ∣ s , a ) [ r + γ E π [ G t + 1 ∣ S t + 1 = s ′ ] ] =\sum_{a}^{}\pi \left (a|s \right )\sum_{s^{'}}\sum_{r}^{}p\left ( s^{'},r\mid s,a\right )\bigg [ r+\gamma E_{\pi}\left [ G_{t+1}\mid S_{t+1}=s^{'}\right ] \bigg ] =∑aπ(a∣s)∑s′∑rp(s′,r∣s,a)[r+γEπ[Gt+1∣St+1=s′]] 离散随机变量的期望定义
= ∑ a π ( a ∣ s ) ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ V π ( s ′ ) ] =\sum_{a}^{}\pi \left (a|s \right )\sum_{s^{'},r}p\left ( s^{'},r\mid s,a\right )\bigg [ r+\gamma V_{\pi}\left ( s^{'}\right ) \bigg ] =∑aπ(a∣s)∑s′,rp(s′,r∣s,a)[r+γVπ(s′)]
价值函数的意义:
说通俗一点就是:判断当前的局势好不好,比如游戏中是快赢了还是快输了, V π ( s ) V_{\pi}\left ( s\right ) Vπ(s)越大代表局势越好。
- Action-value Function(动作价值函数):定义如下:
Q π ( s , a ) = E π [ G t ∣ S t = s , A t = a ] Q_{π}(s,a) = E_{π}[G_{t} | S_{t} = s,A_{t}=a] Qπ(s,a)=Eπ[Gt∣St=s,At=a]
解释:在当前状态已知的情况改下,采取策略π并执行动作a之后,所获得的累计奖励的期望。
动作价值函数化简如下:
Q π ( s , a ) = E π [ G t ∣ S t = s , A t = a ] Q_{π}(s,a) = E_{π}[G_{t} | S_{t} = s,A_{t}=a] Qπ(s,a)=Eπ[Gt∣St=s,At=a]
= E π [ R t + 1 + γ G t + 1 ∣ S t = s , A t = a ] =E_{π}[R_{t+1} + \gamma G_{t+1}| S_{t} = s,A_{t}=a] =Eπ[Rt+1+γGt+1∣St=s,At=a]
= ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ V π ( s ′ ) ] ( 1 ) =\sum_{s^{'},r}p\left ( s^{'},r\mid s,a\right )\bigg [ r+\gamma V_{\pi}\left ( s^{'}\right ) \bigg ](1) =∑s′,rp(s′,r∣s,a)[r+γVπ(s′)](1)
动作价值函数的意义:
Q π ( s , a ) Q_{\pi}\left ( s,a\right ) Qπ(s,a)对当前状态s下,通过策略执行的动作a进行评估(打分), Q π ( s , a ) Q_{\pi}\left ( s,a\right ) Qπ(s,a)越大说明当前执行的动作a越好。
- Value Function 和 Action-value Function二者之间的关系:
很多资料都是从公式角度出发,一步一步推导出二者关系,对于数学底子薄弱的同学可能很难理解,所以我将从回溯图的角度直观的介绍二者之间的关系。
 回溯图
回溯图如上图所示,状态价值函数 V π ( s ) V_{\pi}\left ( s\right ) Vπ(s)只要知道当前状态和策略就可以进行计算之后的累计回报,而动作价值函数 Q π ( s , a ) Q_{\pi}\left ( s,a\right ) Qπ(s,a)还需要知道确切的选择动作,才能计算之后的累计回报。二者之间仅仅差了一个动作的选择,而动作的选择靠的就是策略 π ( a ∣ s ) π(a | s) π(a∣s)。所以很明显的可以得到下式:
V π = ∑ a ∈ A π ( a ∣ s ) ⋅ Q π ( s , a ) V_{\pi }=\sum_{a\in A}^{}\pi(a|s)\cdot Q_{\pi }(s,a) Vπ=a∈A∑π(a∣s)⋅Qπ(s,a)
Q π ( s , a ) = ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ V π ( s ′ ) ] ( 1 ) Q_{π}(s,a)=\sum_{s^{'},r}p\left ( s^{'},r\mid s,a\right )\bigg [ r+\gamma V_{\pi}\left ( s^{'}\right ) \bigg ] (1) Qπ(s,a)=s′,r∑p(s′,r∣s,a)[r+γVπ(s′)](1)
- Optimal Value Function(最优价值函数):定义如下:
V ∗ ( s ) = m a x π V π ( s ) V_{*}(s)=max_{\pi}V_{\pi}(s) V∗(s)=maxπVπ(s)
解释:所有策略 π \pi π中,所计算出来的 V π ( s ) V_{\pi}(s) Vπ(s)中的最大值,即为 V ∗ ( s ) V_{*}(s) V∗(s),此时策略 π \pi π就是最好的策略。也就是说,无论采取任何策略 π \pi π,所计算出来的 V π ( s ) V_{\pi}(s) Vπ(s)都不可能大于 V ∗ ( s ) V_{*}(s) V∗(s)。
最优价值函数化简如下:
V ∗ ( s ) = m a x π V π ( s ) V_{*}(s)=max_{\pi}V_{\pi}(s) V∗(s)=maxπVπ(s)
= m a x E π [ R t + 1 + γ G t + 1 ∣ S t = s ] =maxE_{π}[R_{t+1} + \gamma G_{t+1}| S_{t} = s] =maxEπ[Rt+1+γGt+1∣St=s]
= m a x ∑ a π ( a ∣ s ) ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ V π ( s ′ ) ] =max\sum_{a}^{}\pi \left (a|s \right )\sum_{s^{'},r}p\left ( s^{'},r\mid s,a\right )\bigg [ r+\gamma V_{\pi}\left ( s^{'}\right ) \bigg ] =max∑aπ(a∣s)∑s′,rp(s′,r∣s,a)[r+γVπ(s′)] 取最好的策略 π \pi π
= m a x a ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ V ∗ ( s ′ ) ] =max_{a}\sum_{s^{'},r}p\left ( s^{'},r\mid s,a\right )\bigg [ r+\gamma V_{*}\left ( s^{'}\right ) \bigg ] =maxa∑s′,rp(s′,r∣s,a)[r+γV∗(s′)]
- Optimal Action-value Function(最优动作价值函数):定义如下:
Q ∗ ( s , a ) = m a x π Q π ( s , a ) Q_{*}(s,a)=max_{\pi}Q_{\pi}(s,a) Q∗(s,a)=maxπQπ(s,a)
解释:无论使用什么策略 π \pi π,所计算出最大的 Q π ( s , a ) Q_{\pi}(s,a) Qπ(s,a)。
最优动作价值函数化简如下:
Q ∗ ( s , a ) = m a x π Q π ( s , a ) Q_{*}(s,a)=max_{\pi}Q_{\pi}(s,a) Q∗(s,a)=maxπQπ(s,a)
= m a x π E π [ G t ∣ S t = s , A t = a ] = max_{\pi}E_{π}[G_{t} | S_{t} = s,A_{t}=a] =maxπEπ[Gt∣St=s,At=a]
= ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ m a x a ′ Q ∗ ( s ′ , a ′ ) ] =\sum_{s^{'},r}p\left ( s^{'},r\mid s,a\right )\bigg [ r+\gamma max_{a'}Q_{*}\left ( s^{'},a^{'}\right ) \bigg ] =∑s′,rp(s′,r∣s,a)[r+γmaxa′Q∗(s′,a′)]