openc-Python扫描照片中的文档
目录
- 文档扫描预览
- 具体实现
-
- 利用Canny算子对图片进行处理
- 对处理后图片进行轮廓检测
- 筛选轮廓并拉直为四边形
- 对图像进行透视变换
-
- 对轮廓的四角坐标进行排序
- 得到变换后坐标,并变换
- 附录
文档扫描预览
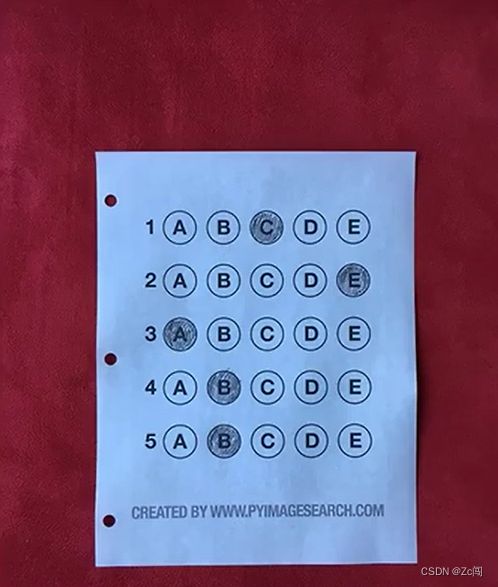
将图片中的档变成易于查看的扫描件
当前图片:
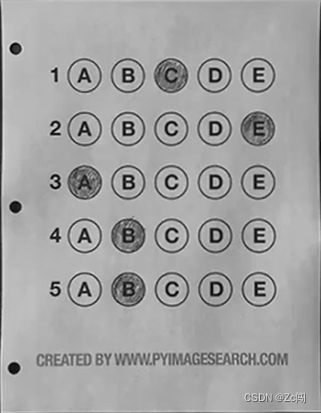
处理后的图片:
具体实现
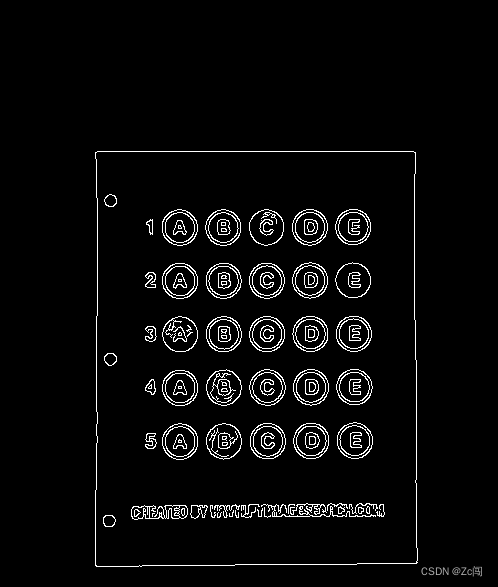
利用Canny算子对图片进行处理
利用Canny算子对图片进行边缘检测,得到一个二值化相对较好的图片,滤除背景颜色。
#滤波
blur_picture = cv2.GaussianBlur(picture_for_scan, (5, 5), 0)
cv_show('blur_picture', blur_picture)
#canny算子,边缘检测(双阈值处理)
edged_picture = cv2.Canny(blur_picture, 50, 200)
ret , edged_picture = cv2.threshold(edged_picture, 200, 255, cv2.THRESH_BINARY)
cv_show('edged_picture', edged_picture)
边缘处理后的图片:
对处理后图片进行轮廓检测
contours , hes = cv2.findContours(edged_picture.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
draw_contours_picture = cv2.drawContours(color_picture, contours, -1, (0, 255, 0), 2)
cv_show('draw_contours_picture', draw_contours_picture)
轮廓检测效果:

筛选轮廓并拉直为四边形
因为检测出的轮廓可能是多个,我们选择面积最大的那个轮廓框架。
if len(contours) > 0:
#按面积大小排序
contours = sorted(contours, key = cv2.contourArea , reverse = True)
选出最大轮廓后,因为轮廓可能是个多边形,所以需要把它拉直为四边形。
#将轮廓拉直为四边形
c = contours[0]
peri = cv2.arcLength(c, True)
for k in np.arange(0,0.1,0.01):
approx = cv2.approxPolyDP(c, k*peri, True)
if len(approx) == 4:
docCnt = approx
break
对图像进行透视变换
对轮廓的四角坐标进行排序
将四个角坐标进行重排,重排顺序为:左上, 右上, 左下, 右下。
#将四个角坐标排序:左上, 右上, 左下, 右下
def order_points(pts):
#按x坐标重排
sort_id = np.argsort(pts[:,0])
pts = pts[sort_id, :]
#按y坐标重排
mid_sort_id = np.argsort(pts[0:2, 1])
pts[0:2, :] = pts[mid_sort_id, :]
mid_sort_id = np.argsort(pts[2:4, 1])
mid_pts = pts[2:4, :]
pts[2:4 :] = mid_pts[mid_sort_id, :]
return pts
得到变换后坐标,并变换
选取长变和最大的高作为变换后图片的长和宽。(ps:变换后坐标顺序为:左上, 右上, 左下, 右下)
rect = order_points(pts)
(tl, tr, bl, br) = rect
#计算轮廓参数
widthA = distance(br, bl)
widthB = distance(tr, tl)
maxWidth = max(int(widthA), int(widthB))
heigthA = distance(tr, br)
heigthB = distance(tl, bl)
maxHeigth = max(int(heigthA), int(heigthB))
#变换后坐标
dst = np.array([
[0, 0],
[0, maxWidth-1],
[maxHeigth-1, 0],
[maxHeigth-1, maxWidth-1]
],dtype = np.float32)
#数据类型转换
rect = rect.astype(np.float32)
坐标变换:
#计算变换矩阵
M = cv2.getPerspectiveTransform(rect, dst)
#图像坐标变换
warped = cv2.warpPerspective(img, M, (maxHeigth, maxWidth))
附录
#扫描图片
import cv2
import numpy as np
def cv_show(name,img):
cv2.imshow(name, img)
cv2.imwrite('./scan_picture/' + name + '.png', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
def order_points(pts):
#按x坐标重排
sort_id = np.argsort(pts[:,0])
pts = pts[sort_id, :]
#按y坐标重排
mid_sort_id = np.argsort(pts[0:2, 1])
pts[0:2, :] = pts[mid_sort_id, :]
mid_sort_id = np.argsort(pts[2:4, 1])
mid_pts = pts[2:4, :]
pts[2:4 :] = mid_pts[mid_sort_id, :]
return pts
#计算两点间曼哈顿距离
def distance(x , y):
dis = np.sqrt(((x[0]-y[0])**2)+((x[1]-y[1])**2))
return dis
#图像坐标变换
def four_point_transform(img , pts):
rect = order_points(pts)
(tl, tr, bl, br) = rect
#计算轮廓参数
widthA = distance(br, bl)
widthB = distance(tr, tl)
maxWidth = max(int(widthA), int(widthB))
heigthA = distance(tr, br)
heigthB = distance(tl, bl)
maxHeigth = max(int(heigthA), int(heigthB))
#变换后坐标
dst = np.array([
[0, 0],
[0, maxWidth-1],
[maxHeigth-1, 0],
[maxHeigth-1, maxWidth-1]
],dtype = np.float32)
#数据类型转换
rect = rect.astype(np.float32)
#计算变换矩阵
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(img, M, (maxWidth, maxHeigth))
return warped
picture_for_scan = cv2.imread('./scan_picture/origina_picture.png' , 0)
origina_picture = cv2.imread('./scan_picture/origina_picture.png' , 1)
color_picture = origina_picture.copy()
cv_show('origina_picture', origina_picture)
#滤波
blur_picture = cv2.GaussianBlur(picture_for_scan, (5, 5), 0)
cv_show('blur_picture', blur_picture)
#canny算子,边缘检测(双阈值处理)
edged_picture = cv2.Canny(blur_picture, 50, 200)
ret , edged_picture = cv2.threshold(edged_picture, 200, 255, cv2.THRESH_BINARY)
cv_show('edged_picture', edged_picture)
contours , hes = cv2.findContours(edged_picture.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
draw_contours_picture = cv2.drawContours(color_picture, contours, -1, (0, 255, 0), 2)
cv_show('draw_contours_picture', draw_contours_picture)
if len(contours) > 0:
#按面积大小排序
contours = sorted(contours, key = cv2.contourArea , reverse = True)
#将轮廓拉直为四边形
c = contours[0]
peri = cv2.arcLength(c, True)
for k in np.arange(0,0.1,0.01):
approx = cv2.approxPolyDP(c, k*peri, True)
if len(approx) == 4:
docCnt = approx
break
scaned_picture = four_point_transform(picture_for_scan.copy() , docCnt.reshape(4, 2))
#二值化处理,使得背景为白色
#ret , scaned_picture = cv2.threshold(scaned_picture, 0, 255, cv2.THRESH_OTSU)
cv_show('scaned_picture', scaned_picture)