CCF CSP认证2022年6月 归一化处理、寻宝!大冒险!、光线追踪
这是我第一次参加了这次CSP考试,300分,写了124三题,模拟题到现在都没看过题面没看,笑,t4写成模拟加数据结构,200+行,因为一个小错误调了1h,错失了大好机会。考试环境的VSC配置的字体太小,甚至连空格都看不清有还是没有,当时没想到可以重新配置,这可能也是我t4调了1h的原因。
距离下一次CSP考试考试还有20天左右,特此回顾。代码均为考试时提交的代码,补充思路。
T1 归一化处理
思路
数据归一化处理,根据给定公式进行计算。


这里要求了输出精度,通过流的格式标志值 i o s _ b a s e : : f i x e d ios\_base::fixed ios_base::fixed和 s e t p r e c i s i o n ( ) setprecision() setprecision()设置输出小数点后10位。
cout << fixed << setprecision(10) << (a[i] - av) / sD << '\n';
代码
void solve() {
int n; cin >> n;
vector<double> a(n);
double sum = 0;
for (int i = 0; i < n; i++) cin >> a[i], sum += a[i];
double av = sum / n;
double sD = 0;
for (int i = 0; i < n; i++) {
sD += (a[i] - av) * (a[i] - av);
}
sD /= n;
sD = sqrt(sD);
for (int i = 0; i < n; i++) {
cout << fixed << setprecision(10) << (a[i] - av) / sD << '\n';
}
}
T2 寻宝!大冒险!
思路
![]()
给定一个大矩阵 L L L和小矩阵 S S S,均为01矩阵,问 L L L有多少处和 S S S匹配( L L L有多少个子矩阵和 S S S相等)。
暴力匹配,时间为 O ( L 2 S 2 ) O(L^2S^2) O(L2S2),虽然一旦不匹配就可以终止,但乐观估计不优于 O ( L 2 ) O(L^2) O(L2).
因此,需要采取一些方法,注意到 n ≤ 1000 n\leq 1000 n≤1000,即‘1’的个数不超过1000,而且
![]()
因此从大矩阵‘1’的位置开始匹配,理论复杂度为 O ( n × S 2 ) O(n\times S^2) O(n×S2),约为 2.5 e 6 2.5e6 2.5e6,时间上可以过,但是还有空间的问题,无法开 1 e 18 1e18 1e18的 b o o l bool bool数组,因此用 s e t < p a i r < i n t , i n t > > set
代码
set<pair<int, int> > Set;
vector<pair<int, int> > a, b;
void solve() {
int n, L, S;
cin >> n >> L >> S;
int x, y;
for (int i = 1; i <= n; i++) {
cin >> x >> y;
Set.insert({x, y});
}
int m;
for (int i = 0; i <= S; i++) {
for (int j = 0; j <= S; j++) {
cin >> m;
if (m) {
a.push_back({S - i, j}); // a tree
}
else b.push_back({S - i, j});
}
}
int ans = 0;
for (auto i : Set) {
if (i.first + S > L || i.second + S > L) continue;
bool ok = 1;
// cout << "i: " << i.first << ' ' << i.second << '\n';
for (auto j : a) {
// cout << "j: " << j.first << ' ' << j.second << '\n';
int tx = i.first + j.first;
int ty = i.second + j.second;
// cout << tx << ' ' << ty << '\n';
if (Set.find({tx, ty}) == Set.end()) {
ok = 0;
break;
}
}
for (auto j : b) {
if (!ok) break;
int tx = i.first + j.first;
int ty = i.second + j.second;
// cout << tx << ' ' << ty << '\n';
if (Set.find({tx, ty}) != Set.end()) {
ok = 0;
break;
}
}
if (ok) ans++;
}
cout << ans << '\n';
}
T4 光线追踪
思路
原来这题是图形学的背景,这学期刚刚在学CG,确实CG中很多用数据结构优化(比如多边形填充的APT)的算法。

限制了光线只能水平或者竖直地射,包括反射后的光线,而反射面的端点坐标均为整数,光源也设置在整点位置,因此可以认为光线在网格格线上运动,更进一步,可以认为反射面只设定在格点上。

光线在反射过程中存在耗散。
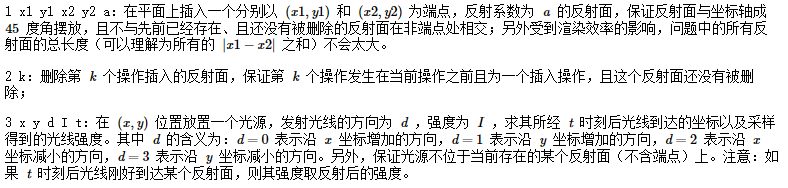
1,2定义了反射面的增删操作,3设置光源询问 t t t时间后,光线的位置 ( x , y ) (x,y) (x,y),以及剩余光线强度 I I I。
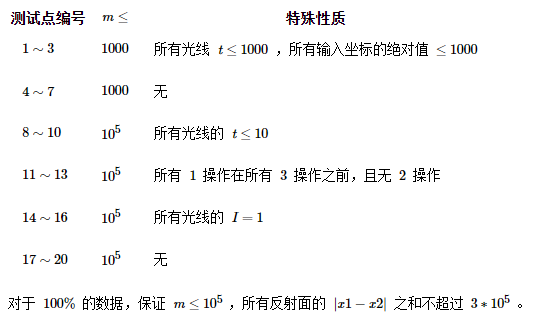
这个 3 e 5 3e5 3e5的保证意味着可以 O ( n ) O(n) O(n)地将反射面的性质(耗散率,放置方向)存储(或者移除)到一定区间的格点中,用格点代表反射面,格点数就是 ∑ ∣ x 1 − x 2 ∣ \sum|x_1-x_2| ∑∣x1−x2∣.
![]()
网格大小为 1 e 9 2 1e9^2 1e92,因此必须不能 O ( t ) O(t) O(t)模拟光线的运动。光线的运动状态通过当前位置 ( x , y ) (x,y) (x,y)和方向 d d d,如果 d d d不变,可以 O ( 1 ) O(1) O(1)确定 t t t时间后的位置,而 d d d变化由反射引起,反射是由于经过了反射面,即具有反射性质的格点(下称为格点)。
- 如何快速找到该点? s e t set set上二分,将反射点存储于 s e t set set中,从当前点 ( x , y ) (x,y) (x,y)出发找第一个反射点。
- 通过 m a p < l l , s e t < l l > > map
setX[2 * N] set<int>setX[2∗N],提交后RE了,因为坐标可能为负数,而下标不能为负,然后第一次想到了这种用法,将数组下标范围扩大至负数域,而且是动态地开辟空间,不用为内存限制而烦恼!
结合代码讲讲:
定义了结构体 m i r r o r mirror mirror,解决题目规定的对反射面整体的增加和删除操作,对应结构体方法 i n i t init init和 c l r clr clr,而 r e s e t reset reset是将反射性质赋予区域中的格点,就是将该点存储于 m a p < l l , s e t < l l > > map
if (setX[x].size() == 0) setX.erase(x);
w o r k work work函数模拟光线的运动,是递归函数,输入参数 x , y x,y x,y是当前坐标, d d d是方向, I I I是强度, t t t是询问 t t t时刻后的位置。
void work(ll x, ll y, int d, double I, ll t) {
这个函数我按照运动方向分为了4个部分写,因为每个方向上 s e t set set调用的二分方法不同, u p p e r _ b o u n d upper\_bound upper_bound或者 l o w e r _ b o u n d lower\_bound lower_bound,而且边界情况也不好统一表达,只能 i f e l s e ifelse ifelse分类讨论了。
具体看一种情况,光线沿着 x x x轴增加:
此时 y y y不变,首先判断该格线上是否有反射点,没有访问会RE:
if (setY.find(y) == setY.end()) {
若没有,则一直前进;否则,则调用 s e t set set自带的二分方法:
auto it = setY[y].upper_bound(x); // 找到第一个大于x的数
若没有找到这样的反射点,则一直前进;否则可能发生发射,还要检查到达该点的用时,时间充足发生反射,写到这里大家肯定发现这是道具有大模拟性质的t4了。
发生反射,由于光线原来方向沿 x x x增加,只可能变为沿 y y y方向增加或者减少,这个通过镜子的放置方向确定,递归。
代码
const int N = 1e5 + 5;
const int maxn = 1e5 + 5;
// set setX[2 * N];
// set setY[2 * N];
map<ll, set<ll> > setX;
map<ll, set<ll> > setY;
map<pair<ll, ll>, int> mp;
struct mirror
{
void init(int ID, ll a1, ll b1, ll a2, ll b2, double A) {
id = ID;
x1 = a1; y1 = b1; x2 = a2; y2 = b2; a = A;
}
void reset() {
if (x1 > x2) dx = -1;
else dx = 1;
if (y1 > y2) dy = -1;
else dy = 1;
ll x = x1 + dx, y = y1 + dy;
while (x != x2) {
setX[x].insert(y);
setY[y].insert(x);
mp[{x, y}] = id; // 将点对应至镜子
x += dx; y += dy;
}
}
void clr() {
ll x = x1 + dx, y = y1 + dy;
while (x != x2) {
setX[x].erase(y);
setY[y].erase(x);
if (setX[x].size() == 0) setX.erase(x);
if (setY[y].size() == 0) setY.erase(y);
mp.erase({x, y});
x += dx; y += dy;
}
}
int id;
ll x1, y1, x2, y2;
int dx, dy;
double a;
} M[maxn];
void work(ll x, ll y, int d, double I, ll t) {
// cout << "work: " << x << ' ' << y << ' ' << d << ' ' << I << ' ' << t << '\n';
if (I < 1.0) { // 已经完全耗散
cout << "0 0 0\n";
return;
}
// if (x < 0 || y < 0) return;
if (d == 0) { // x -> 沿着x轴增加
if (setY.find(y) == setY.end()) {
cout << x + t << ' ' << y << ' ' << (int)I << '\n';
return;
}
auto it = setY[y].upper_bound(x); // 找到第一个大于x的数
if (it == setY[y].end()) { // 若无则代表没有镜子
cout << x + t << ' ' << y << ' ' << (int)I << '\n';
return;
}
else {
ll nx = *it;
if (t < nx - x) { // 看剩余时间是否充足
cout << x + t << ' ' << y << ' ' << (int)I << '\n';
return;
}
int mir = mp[{nx, y}]; // 进行一次反射
auto Mir = M[mir];
if (Mir.dx * Mir.dy > 0) { // 判断镜子方向
work(nx, y, 1, I * Mir.a, t - (nx - x));
}
else {
work(nx, y, 3, I * Mir.a, t - (nx - x));
}
}
}
else if (d == 1) { // y ^
if (setX.find(x) == setX.end()) {
cout << x << ' ' << y + t << ' ' << (int)I << '\n';
return;
}
auto it = setX[x].upper_bound(y);
if (it == setX[x].end()) {
cout << x << ' ' << y + t << ' ' << (int)I << '\n';
return;
}
else {
ll ny = *it;
if (t < ny - y) {
cout << x << ' ' << y + t << ' ' << (int)I << '\n';
return;
}
int mir = mp[{x, ny}];
auto Mir = M[mir];
if (Mir.dx * Mir.dy > 0) {
work(x, ny, 0, I * Mir.a, t - (ny - y));
}
else {
work(x, ny, 2, I * Mir.a, t - (ny - y));
}
}
}
else if (d == 2) { // x <- 沿着x轴减少
if (setY.find(y) == setY.end()) {
cout << x - t << ' ' << y << ' ' << (int)I << '\n';
return;
}
auto it = setY[y].lower_bound(x);
if (it == setY[y].begin()) { // 没有小于x的数
cout << x - t << ' ' << y << ' ' << (int)I << '\n';
return;
}
else {
it--; // 第一个小于x的数
ll nx = *it;
if (t < x - nx) {
cout << x - t << ' ' << y << ' ' << (int)I << '\n';
return;
}
int mir = mp[{nx, y}];
auto Mir = M[mir];
if (Mir.dx * Mir.dy > 0) {
work(nx, y, 3, I * Mir.a, t - (x - nx));
}
else {
work(nx, y, 1, I * Mir.a, t - (x - nx));
}
}
}
else if (d == 3) { // y v
if (setX.find(x) == setX.end()) {
cout << x << ' ' << y - t << ' ' << (int)I << '\n';
return;
}
auto it = setX[x].lower_bound(y);
if (it == setX[x].begin()) {
cout << x << ' ' << y - t << ' ' << (int)I << '\n';
return;
}
else {
it--;
ll ny = *it;
if (t < y - ny) {
cout << x << ' ' << y - t << ' ' << (int)I << '\n';
return;
}
int mir = mp[{x, ny}];
auto Mir = M[mir];
if (Mir.dx * Mir.dy > 0) {
work(x, ny, 2, I * Mir.a, t - (y - ny));
}
else {
work(x, ny, 0, I * Mir.a, t - (y - ny));
}
}
}
}
void solve() {
int m; cin >> m;
ll op, x1, y1, x2, y2, d, t, k;
double a, I;
for (int i = 1; i <= m; i++) {
cin >> op;
if (op == 1) {
cin >> x1 >> y1 >> x2 >> y2 >> a;
M[i].init(i, x1, y1, x2, y2, a); // 添加反射镜
M[i].reset();
}
else if (op == 2) {
cin >> k;
M[k].clr();
}
else if (op == 3) {
cin >> x1 >> y1 >> d >> I >> t;
if (t == 0) {
cout << x1 << ' ' << y1 << ' ' << (int)I << '\n';
}
work(x1, y1, d, I, t);
}
}
}