c语言五子棋alpha,AlphaZero并行五子棋AI
AlphaZero-Gomoku-MPI

Link
Overview
This repo is based on junxiaosong/AlphaZero_Gomoku, sincerely grateful for it.
I do these things:
Implement asynchronous self-play training pipeline in parallel like AlphaGo Zero's way
Write a root parallel mcts (vote a move using ensemble way)
Use ResNet structure to train the model and set a transfer learning API to train a larger board model based on small board's model (like pre-training way in order to save time)
Strength
Current model is on 11x11 board, and playout 400 times when test
Play with this model, can always win regardless of black or white
Play with gomocup's AI, can rank around 20th-30th for some rough tests
When I play white, I can't win AI. When I play black, end up with tie/lose for most of my time
References
Blog
Installation Dependencies
Python3
tensorflow>=1.8.0
tensorlayer>=1.8.5
mpi4py (parallel train and play)
pygame (GUI)
How to Install
tensorflow/tensorlayer/pygame install :
conda install tensorflow
conda install tensorlayer
conda install pygame
mpi4py install click here
mpi4py on windows click here
How to Run
Play with AI
python human_play.py
Play with parallel AI (-np : set number of processings, take care of OOM !)
mpiexec -np 3 python -u human_play_mpi.py
Train from scratch
python train.py
Train in parallel
mpiexec -np 43 python -u train_mpi.py
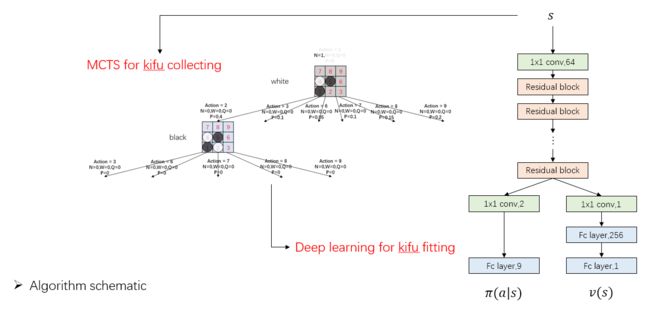
Algorithm
It's almost no difference between AlphaGo Zero except APV-MCTS.
A PPT can be found in dir demo/slides
Details
Most settings are the same with AlphaGo Zero, details as follow :
Network Structure
Current model uses 19 residual blocks, more blocks means more accurate prediction but also slower speed
The number of filters in convolutional layer shows in the follow picture

Feature Planes
In AlphaGo Zero paper, there are 19 feature planes: 8 for current player's stones, 8 for opponent's stones, and the final feature plane represents the colour to play
Here I only use 4 for each player, it can be easily changed in game_board.py
Dirichlet Noise
I add dirichlet noises in each node, it's different from paper that only add noises in root node. I guess AlphaGo Zero discard the whole tree after each move and rebuild a new tree, while here I keep the nodes under the chosen action, it's a little different
Weights between prior probabilities and noises are not changed here (0.75/0.25), though I think maybe 0.8/0.2 or even 0.9/0.1 is better because noises are added in every node
parameters in detail
I try to maintain the original parameters in AlphaGo Zero paper, so as to testify it's generalization. Besides, I also take training time and computer configuration into consideration.
Parameters Setting
Gomoku
AlphaGo Zero
MPI num
43
-
c_puct
5
5
n_playout
400
1600
blocks
19
19/39
buffer size
500,000(data)
500,000(games)
batch_size
512
2048
lr
0.001
annealed
optimizer
Adam
SGD with momentum
dirichlet noise
0.3
0.03
weight of noise
0.25
0.25
first n move
12
30
Training detials
I train the model for about 100,000 games and takes 800 hours or so
Computer configuration : 2 CPU and 2 1080ti GPU
We can easily find the computation gap with DeepMind and rich people can do some future work
Some Tips
Network
ZeroPadding with Input : Sometimes when play with AI, it's unaware of the risk at the edge of board even though I'm three/four in a row. ZeroPadding data input can mitigate the problem
Put the network on GPU : If the network is shallow, it's not matter CPU/GPU to use, otherwise it's faster to use GPU when self-play
Dirichlet Noise
Add Noise in Node : In junxiaosong/AlphaZero_Gomoku, noises are added outside the tree, seemingly like DQN's \(\epsilon-greedy\) way. It's ok when I test on 6x6 and 8x8 board, but when on 11x11 some problems occur. After a long time training on 11x11, black player will always play the first stone in the middle place with policy probability equal to 1. It's very rational for black to play here, however, the white player will never see other kifu that play in the other place at first stone. So, when I play black with AI and place somewhere not the middle place, AI will get very stupid because it has never seen this way at all. Add noise in node can mitigate the problem
Smaller Weight with Noise : As I said before, I think maybe 0.8/0.2 or even 0.9/0.1 is a better choice between prior probabilities and noises' weights, because noises are added in every node
Randomness
Dihedral Reflection or Rotation : When use the network to output probabilities/value, it's better to do as paper said: The leaf node \(s_L\) is added to a queue for neural network evaluation, \((d_i(p),v)=f_{\theta}(d_i(s_L))\), where \(d_i\) is a dihedral reflection or rotation selected uniformly at random from \(i\) in \([1..8]\)
Add Randomness when Test : I add the dihedral reflection or rotation also when play with it, so as to avoid to play the same game all the time
Tradeoffs
Network Depth : If the network is too shallow, loss will increase. If too deep, it's slow when train and test. (My network is still a little slow when play with it, I think maybe 9 blocks is all right)
Buffer Size : If the size is small, it's easy to fit by network but can't guarantee it's performance for only learning from these few data. If it's too large, much longer time and deeper network structure should be taken
Playout Number : If small, it's quick to finish a self-play game but can't guarantee kifu's quality. On the contrary with more playout times, better kifu will get but also take longer time
Future Work Can Try
Continue to train (a larger board) and increase the playout number
Try some other parameters for better performance
Alter network structure
Alter feature planes
Implement APV-MCTS
Train on standard/renju rule