大盘点|YOLO 系目标检测算法总览
大盘点|YOLO 系目标检测算法总览
CV君 极市平台 2020-07-31
原文地址: https://mp.weixin.qq.com/s/R_A2Fmtzyqh2rt6Ob5eeNQ
YOLO目标检测算法诞生于2015年6月,从出生的那一天起就是“高精度、高效率、高实用性”目标检测算法的代名词。
在原作者Joseph Redmon博士手中,YOLO经历了三代到YOLOv3,今年初Joseph Redmon宣告退出计算机视觉研究界后,YOLOv4、YOLOv5相继而出,且不论谁是正统,这YOLO算法家族在创始人拂袖而出后依然热闹非凡。
本文带领大家细数在此名门之中自带“YOLO”的算法,总计 23 项工作,它们有的使YOLO更快,有的使YOLO更精准,有的扩展到了3D点云、水下目标检测、有的则在FPGA、CPU、树莓派上大显身手,甚至还有的进入了语音处理识别领域。
而几乎所有YOLO系算法都力图保持高精度、高效率、高实用性,这也许就是工业界偏爱YOLO的理由吧!
YOLOv1 开山鼻祖之作
You Only Look Once: Unified, Real-Time Object Detection
作者:Joseph Redmon, Santosh Divvala, Ross Girshick, Ali Farhadi
单位:华盛顿大学;Allen Institute for AI;FAIR
论文:https://arxiv.org/abs/1506.02640
引用 | 10222
主页:https://pjreddie.com/darknet/yolo/
时间:2015年6月8日
标准版本的YOLO在Titan X 的 GPU 上能达到 45 FPS。更快的 Fast YOLO 检测速度可以达到 155 FPS。
YOLOv2
YOLO9000: Better, Faster, Stronger
作者:Joseph Redmon, Ali Farhadi
单位:华盛顿大学;Allen Institute for AI
论文:https://arxiv.org/abs/1612.08242
引用 | 5168
主页:https://pjreddie.com/darknet/yolo/
时间:2016年12月25日
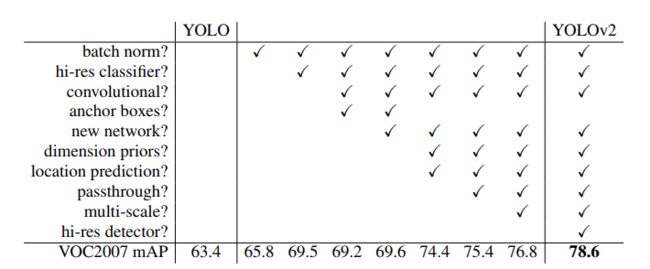
在 YOLO 基础上,保持原有速度的同时提升精度得到YOLOv2,让预测变得更准确(Better),更快速(Faster)。
通过联合训练策略,可实现9000多种物体的实时检测,总体mAP值为19.7。
YOLOv3
YOLOv3: An Incremental Improvement
作者:Joseph Redmon, Ali Farhadi
单位:华盛顿大学
论文:https://arxiv.org/abs/1804.02767
引用 | 3363
主页:https://pjreddie.com/darknet/yolo/
Star | 18.3K
时间:2018年4月8日
在320×320 YOLOv3运行22.2ms,28.2 mAP,像SSD一样准确,但速度快三倍。
在Titan X上,它在51 ms内实现了57.9的AP50,与RetinaNet在198 ms内的57.5 AP50相当,性能相似但速度快3.8倍。
YOLOv4 目标检测tricks集大成者
YOLOv4: Optimal Speed and Accuracy of Object Detection
作者:Alexey Bochkovskiy;Chien-Yao Wang;Hong-Yuan Mark Liao
单位:(中国台湾)中央研究院
论文:https://arxiv.org/pdf/2004.10934v1.pdf
引用 | 17
代码:https://github.com/AlexeyAB/darknet
Star | 11.9K
时间:2020年4月24
解读:
重磅!就在刚刚,吊打一切的 YOLOv4 开源了!
全面解析YOLO V4网络结构
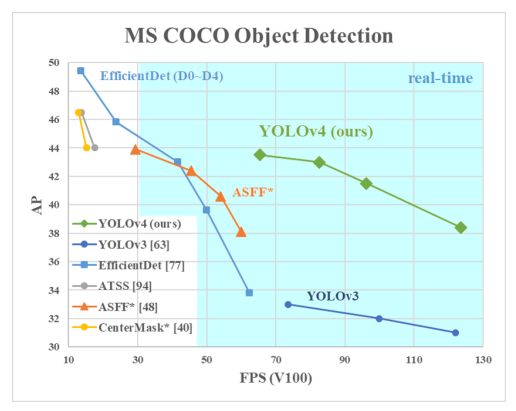
在MS COCO 数据集 实现 43.5% AP (65.7% AP50 ), 速度也更快了,在Tesla V100 GPU上 ∼65 FPS!
YOLOv5
2020年6月25日,Ultralytics发布了YOLOV5 的第一个正式版本,号称其性能与YOLO V4不相伯仲,同样也是现今最先进的目标检测技术,并在推理速度上是目前最强。
论文:无
代码:https://github.com/ultralytics/yolov5
Star | 3.5K
解读:一文读懂YOLO V5 与 YOLO V4

Fast YOLO
Fast YOLO: A Fast You Only Look Once System for Real-time Embedded Object Detection in Video
作者:Mohammad Javad Shafiee, Brendan Chywl, Francis Li, Alexander Wong
单位:滑铁卢大学
论文:https://arxiv.org/abs/1709.05943
引用 | 53
时间:2017年9月18日
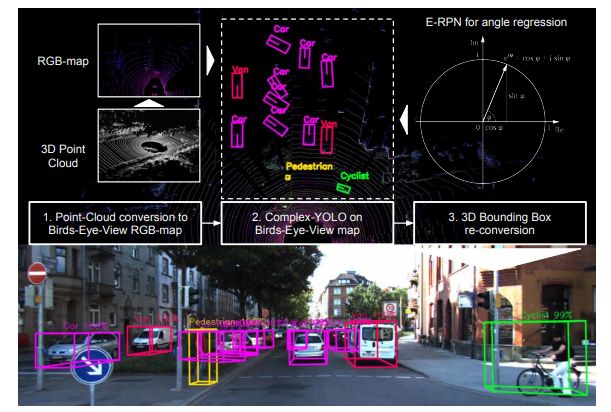
Complex-YOLO
Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection on Point Clouds
作者:Martin Simon, Stefan Milz, Karl Amende, Horst-Michael Gross
单位:伊尔梅瑙工业大学
论文:https://arxiv.org/abs/1803.06199
引用 | 65
代码:https://github.com/ghimiredhikura/Complex-YOLOv3(非官方)
Star | 95(非官方)
代码:https://github.com/maudzung/Complex-YOLOv4-Pytorch(基于v4)
Star | 442(基于v4)
时间:2018年3月16日
基于YOLOv2的一个变种,用于点云3D目标检测。

MV-YOLO
MV-YOLO: Motion Vector-aided Tracking by Semantic Object Detection
作者:Saeed Ranjbar Alvar, Ivan V. Bajić
单位:西蒙弗雷泽大学
论文:https://arxiv.org/abs/1805.00107
引用 | 10
时间:2018年4月30日
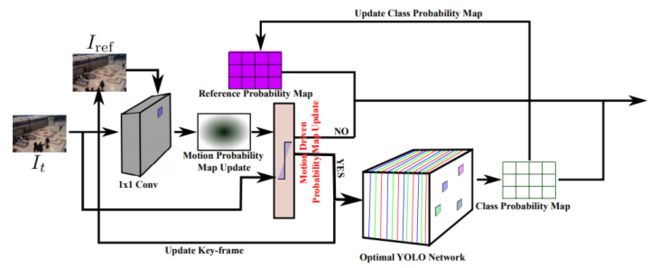
一种结合压缩视频中的运动信息和YOLO目标检测的目标跟踪算法。

YOLO3D
YOLO3D: End-to-end real-time 3D Oriented Object Bounding Box Detection from LiDAR Point Cloud
作者:Waleed Ali, Sherif Abdelkarim, Mohamed Zahran, Mahmoud Zidan, Ahmad El Sallab
单位:Valeo AI Research, Egypt
论文:https://arxiv.org/abs/1808.02350
引用 | 26
备注:ECCV 2018 Workshop
时间:2018年8月7日

YOLO-LITE
YOLO-LITE: A Real-Time Object Detection Algorithm Optimized for Non-GPU Computers
作者:Jonathan Pedoeem, Rachel Huang
单位:佐治亚理工学院等
论文:https://arxiv.org/abs/1811.05588
引用 | 73
代码:https://reu2018dl.github.io/
Star | 336
时间:2018年11月14日
YOLO-LITE 是 YOLOv2-tiny 的Web实现,在 MS COCO 2014 和 PASCAL VOC 2007 + 2012 数据集上训练。
在 Dell XPS 13 机器上可达到 21 FPS ,VOC 数据集上达到33.57 mAP。
Spiking-YOLO
Spiking-YOLO: Spiking Neural Network for Energy-Efficient Object Detection
作者:Seijoon Kim, Seongsik Park, Byunggook Na, Sungroh Yoon
单位:首尔大学
论文:https://arxiv.org/abs/1903.06530
引用 | 3
备注:AAAI 2020
时间:2019年3月12日
该文第一次将脉冲神经网络用于目标检测,虽然精度不高,但相比Tiny_YOLO 耗能更少。(研究意义大于实际应用意义)

DC-SPP-YOLO
DC-SPP-YOLO: Dense Connection and Spatial Pyramid Pooling Based YOLO for Object Detection
作者:Zhanchao Huang, Jianlin Wang
单位:北京化工大学
论文:https://arxiv.org/abs/1903.08589
引用 | 8
时间:2019年3月20日
该作提出一种DC-SPP-YOLO(基于YOLO的密集连接和空间金字塔池化技术)的方法来改善YOLOv2的目标检测精度。


SpeechYOLO
SpeechYOLO: Detection and Localization of Speech Objects
作者:Yael Segal, Tzeviya Sylvia Fuchs, Joseph Keshet
单位:巴伊兰大学
论文:https://arxiv.org/abs/1904.07704
引用 | 2
时间:2019年4月14日
YOLO算法启发的语音处理识别算法。
SpeechYOLO的目标是在输入信号中定位语句的边界,并对其进行正确分类。受YOLO算法在图像中进行目标检测的启发所提出的方法。

Complexer-YOLO
Complexer-YOLO: Real-Time 3D Object Detection and Tracking on Semantic Point Clouds
作者:Martin Simon, Karl Amende, Andrea Kraus, Jens Honer, Timo Sämann, Hauke Kaulbersch, Stefan Milz, Horst Michael Gross
单位:伊尔梅瑙工业大学等
论文:https://arxiv.org/abs/1904.07537
引用 | 24
时间:2019年4月16日
Complex-YOLO的改进版,用于实时点云3D目标检测与跟踪,推断速度加速20%,训练时间减少50%。


SlimYOLOv3
SlimYOLOv3: Narrower, Faster and Better for UAV Real-Time Applications
作者:Pengyi Zhang, Yunxin Zhong, Xiaoqiong Li
单位:北理工
论文:https://arxiv.org/abs/1907.11093
引用 | 18
代码:https://github.com/PengyiZhang/SlimYOLOv3
Star | 953
时间:2019年7月15日
解读|SlimYOLOv3:更窄、更快、更好的无人机目标检测算法
该文对YOLOv3的卷积层通道剪枝,大幅削减了模型的计算量(~90.8% decrease of FLOPs)和参数量( ~92.0% decline of parameter size),剪枝后的模型在基本保持原模型的检测精度同时,运行速度约为原来的两倍。

REQ-YOLO
REQ-YOLO: A Resource-Aware, Efficient Quantization Framework for Object Detection on FPGAs
作者:Caiwen Ding, Shuo Wang, Ning Liu, Kaidi Xu, Yanzhi Wang, Yun Liang
单位:北大;东北大学;鹏城实验室
论文:https://arxiv.org/abs/1909.13396
引用 | 14
时间:2019年9月29日
Tiny-YOLO的 FPGA 实现,REQ-YOLO速度可高达200~300 FPS!

YOLO Nano
YOLO Nano: a Highly Compact You Only Look Once Convolutional Neural Network for Object Detection
作者:Alexander Wong, Mahmoud Famuori, Mohammad Javad Shafiee, Francis Li, Brendan Chwyl, Jonathan Chung
单位:滑铁卢大学;DarwinAI Corp
论文:https://arxiv.org/abs/1910.01271
引用 | 6
时间:2019年10月3日
解读|比Tiny YOLOv3小8倍,性能提升11个点,4MB的网络也能做目标检测
YOLO Nano 比 Tiny YOLOv2 和 Tiny YOLOv3更小,更快,mAP更高!模型仅4.0MB。在 NVIDIA Jetson Xavier上速度竟高达26.9~48.2 FPS!

xYOLO
xYOLO: A Model For Real-Time Object Detection In Humanoid Soccer On Low-End Hardware
作者:Daniel Barry, Munir Shah, Merel Keijsers, Humayun Khan, Banon Hopman
单位:坎特伯雷大学
论文:https://arxiv.org/abs/1910.03159
引用 | 3
时间:2019年10月7日
解读|xYOLO | 最新最快的实时目标检测
该工作所提出的 xYOLO 是从 YOLO v3 tiny 变化而来,xYOLO比Tiny-YOLO快了70倍!在树莓派3B上速度9.66 FPS!模型仅0.82 MB大小,这可能是速度最快模型最小的YOLO变种。


IFQ-Tinier-YOLO
IFQ-Net: Integrated Fixed-point Quantization Networks for Embedded Vision
作者:Hongxing Gao, Wei Tao, Dongchao Wen, Tse-Wei Chen, Kinya Osa, Masami Kato
单位:Canon Information Technology (Beijing) Co., LTD;Device Technology Development Headquarters, Canon Inc.
论文:https://arxiv.org/abs/1911.08076
引用 | 4
时间:2019年11月19日
该工作一部分基于YOLOv2,设计了IFQ-Tinier-YOLO人脸检测器,它是一个定点网络,比Tiny-YOLO减少了256倍的模型大小(246k Bytes)。

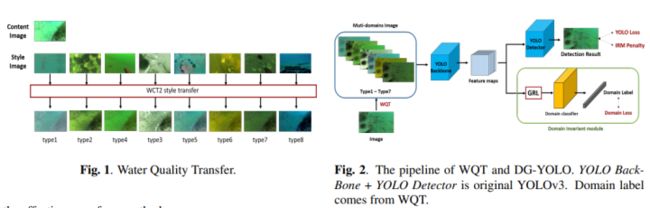
DG-YOLO
WQT and DG-YOLO: towards domain generalization in underwater object detection
作者:Hong Liu, Pinhao Song, Runwei Ding
单位:北大;鹏城实验室
论文:https://arxiv.org/abs/2004.06333
时间:2020年4月14日
该工作旨在研究水下目标检测数据,因为水下目标的数据比较少,提出了新的水质迁移的数据增广方法和YOLO新变种:DG-YOLO ,该算法由 YOLOv3, DIM 和 IRM penalty 组成。
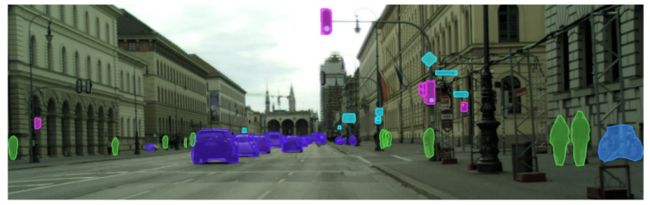
Poly-YOLO
Poly-YOLO: higher speed, more precise detection and instance segmentation for YOLOv3
作者:Petr Hurtik, Vojtech Molek, Jan Hula, Marek Vajgl, Pavel Vlasanek, Tomas Nejezchleba
单位:奥斯特拉发大学;Varroc Lighting Systems
论文:https://arxiv.org/abs/2005.13243
代码:https://gitlab.com/irafm-ai/poly-yolo
时间:2020年5月27日
基于YOLOv3,支持实例分割,检测mAP提升40%!
E-YOLO
Expandable YOLO: 3D Object Detection from RGB-D Images
作者:Masahiro Takahashi, Alessandro Moro, Yonghoon Ji, Kazunori Umeda
单位:(日本)中央大学;RITECS Inc
论文:https://arxiv.org/abs/2006.14837
时间:2020年6月26日
YOLOv3的变种,构建了一个轻量级的目标检测器,从RGBD-D立体摄像机输入深度和彩色图像。该模型的处理速度为44.35fps(GPU: NVIDIA RTX 2080 and CPU: Intel Core i7 8700K)。

PP-YOLO
PP-YOLO: An Effective and Efficient Implementation of Object Detector
作者:Xiang Long, Kaipeng Deng, Guanzhong Wang, Yang Zhang, Qingqing Dang, Yuan Gao, Hui Shen, Jianguo Ren, Shumin Han, Errui Ding, Shilei Wen
单位:百度
论文:https://arxiv.org/abs/2007.12099
解读:https://zhuanlan.zhihu.com/p/163565906
代码:https://github.com/PaddlePaddle/PaddleDetection
时间:2020年7月23日
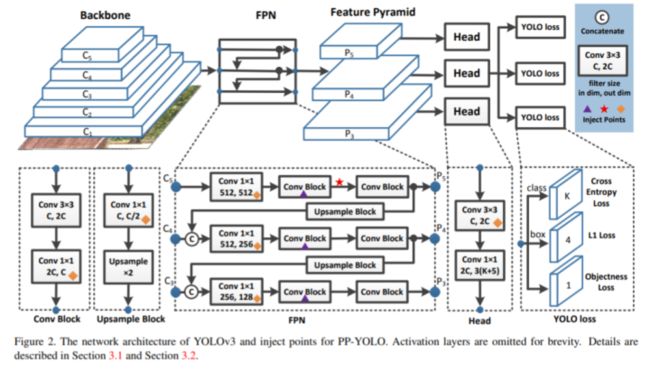
PP-YOLO由在YOLOv3上添加众多tricks“组合式创新”得来,从下图前两列中可看到其使用的技术:
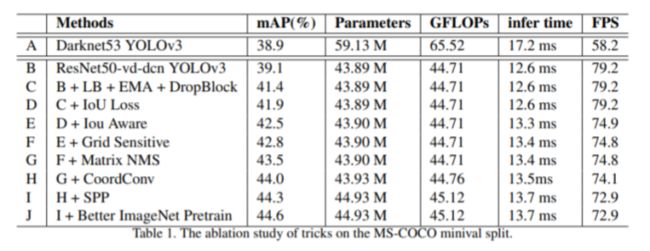
PP-YOLO在精度和效率之间取得更好的平衡,在COCO数据集上达到45.2% mAP,并且速度72.9 FPS!,超越YOLOv4和谷歌EfficientDet,是更加实用的目标检测算法。

在极市平台公众号后台回复YOLO,即可获得上述22篇论文打包下载链接。
还有哪些优秀的YOLO系算法?欢迎留言补充!
推荐阅读
-
盘点目标检测中的特征融合技巧(根据YOLO v4总结)
-
一文读懂YOLO V5 与 YOLO V4
-
全面解析YOLO V4网络结构