深度学习之初识篇——小白也能跑通的深度学习万能框架【重点】
目录
-
-
- 深度学习环境配置
-
- 点击下载深度学习环境
- 数据集准备
- 使用自己标注的数据集
- 使用标注软件
- 数据准备
- VOC标签格式转yolo格式并划分训练集和测试集
- 部署和训练深度学习项目
-
- 克隆项目
- 获得预训练权重
- 训练自己的模型
- 启用tensorbord查看参数
- 每文一语
-
本文是作为后续跑深度学习的一个案例教程,可以作为快速搭建自己的深度学习框架,预计按照本教程3~5分钟即可完成,这是因为深度学习是一个框架学习,不像机器学习那样,我们需要进行部署自己的项目代码,做一些较为复杂的算法处理和学习,而深度学习却可以。
最后用一句话总结:深度学习就像人的大脑一样,世界上有很多个人,不同的大脑会有不同的想法,就像牛顿对待熟透落地的苹果一样,初唐四杰诗人——王勃那样,面对晚霞下的那一句“落霞与孤鹜齐飞,秋水共长天一色”宁静致远。
这是就是为什么人有人说他难,也有人它晦涩难懂。
下面我们开始实战项目演练
深度学习环境配置
众所周知,深度学习配置环境就是一个比较头疼的事情,本次教程由于是快速部署,默认你是有深度学习环境(pytorch)的,如果没有的话,可以点击下面的链接进行下载,我已经部署好了GPU版本的pytorch的深度学习环境,解压可以使用。
点击下载深度学习环境
解压之后,放在我们的anaconda安装好的目录下;如果你是按照默认路径,如下所示:
然后利用打开我们的anaconda;激活环境;

打开我们的pycharm,按照如下操作进行,将本地的Python工程项目进行和我们刚刚新激活的环境链接起来:

数据集准备
使用自己标注的数据集
由于目前深度学习生态在国内比较的好,应用也比较的广泛,例如在:医疗、农业、交通等领域;当然我们可以使用自己的标注的数据集,也就是说从原始的数据集开始自己标注一张一张的,这样的好处是什么呢?我们可以应用到自己的领域,有些时候网上并不能找到一些标注好的数据集,比如在医学方面,有些疾病的医疗影像是不会公开的,是需要自己进行因地制宜,完成数据的标注的。
使用标注软件
这里主要讲的是在window系统中的安装,首先打开cmd命令行(快捷键:win+R)。进入cmd命令行控制台。输入如下的命令
pip install labelimg -i https://pypi.tuna.tsinghua.edu.cn/simple
运行如上命令后,系统就会自动下载labelimg相关的依赖。由于这是一个很轻量的工具,所以下载起来很快,当出现如下红色框框中的告诉我们成功安装的时候,说明labelimg安装成功了。
数据准备
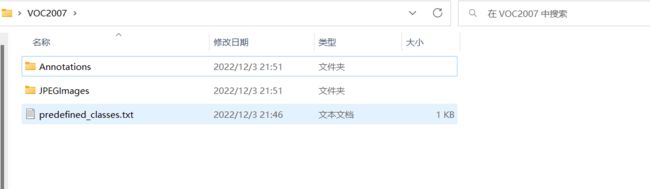
首先这里需要准备我们需要打标注的数据集。这里我建议新建一个名为VOC2007的文件夹,里面创建一个名为JPEGImages的文件夹存放我们需要打标签的图片文件;再创建一个名为Annotations存放标注的标签文件;最后创建一个名为 predefined_classes.txt 的txt文件来存放所要标注的类别名称。
VOC2007的目录结构为:
├── VOC2007
│├── JPEGImages 存放需要打标签的图片文件
│├── Annotations 存放标注的标签文件
│├── predefined_classes.txt 定义自己要标注的所有类别(这个文件可有可无,但是在我们定义类别比较多的时候,最好有这个创建一个这样的txt文件来存放类别)

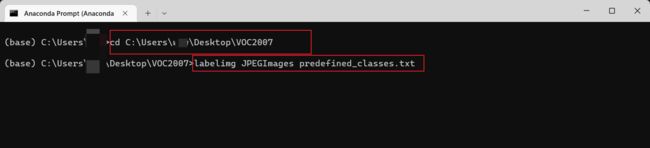
打开cmd命令终端(快捷键:win+R)。进入到刚刚创建的这个VOC2007路径(这个很重要,涉及到能不能利用predefined_classes.txt 这个txt文件中定义的类别,我在这里卡了很久,一度以为不能显示txt文件中定义的类别是我安装有问题)。
执行如图中的命令进入到VOC2007路径下(每个人的路径都不一样,按个人的路径去写)如下图所示:可以看到进入到相应的目录了。
上面具体参数我就不说明了,后期会有专门的教程进行解释
通过大量的标注之后,我们会产生大量的标注文件,这里我们使用的是xml格式的,因为比较显著,看起来具有可读性,但是我们yolov5支持的是txt格式的,相信细心的小伙伴已经发现了,所以我们是通常自己标注为xml文件之后,使用脚本批量进行转换
VOC标签格式转yolo格式并划分训练集和测试集
这里就需要对xml格式的标签文件转换为txt文件。同时训练自己的yolov5检测模型的时候,数据集需要划分为训练集和验证集。这里提供了一份代码将xml格式的标注文件转换为txt格式的标注文件,并按比例划分为训练集和验证集。先上代码再讲解代码的注意事项。
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
import random
from shutil import copyfile
classes = ["标签1", "标签2"]#根据自己标注的进行填写
TRAIN_RATIO = 80#训练集比例
def clear_hidden_files(path):
dir_list = os.listdir(path)
for i in dir_list:
abspath = os.path.join(os.path.abspath(path), i)
if os.path.isfile(abspath):
if i.startswith("._"):
os.remove(abspath)
else:
clear_hidden_files(abspath)
def convert(size, box):
dw = 1./size[0]
dh = 1./size[1]
x = (box[0] + box[1])/2.0
y = (box[2] + box[3])/2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x*dw
w = w*dw
y = y*dh
h = h*dh
return (x,y,w,h)
def convert_annotation(image_id):
in_file = open('VOCdevkit/VOC2007/Annotations/%s.xml' %image_id)#输入的文件路径
out_file = open('VOCdevkit/VOC2007/YOLOLabels/%s.txt' %image_id, 'w')#输出文件路径
tree=ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text))
bb = convert((w,h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
in_file.close()
out_file.close()
wd = os.getcwd()
wd = os.getcwd()
data_base_dir = os.path.join(wd, "VOCdevkit/")
if not os.path.isdir(data_base_dir):
os.mkdir(data_base_dir)
work_sapce_dir = os.path.join(data_base_dir, "VOC2007/")
if not os.path.isdir(work_sapce_dir):
os.mkdir(work_sapce_dir)
annotation_dir = os.path.join(work_sapce_dir, "Annotations/")
if not os.path.isdir(annotation_dir):
os.mkdir(annotation_dir)
clear_hidden_files(annotation_dir)
image_dir = os.path.join(work_sapce_dir, "JPEGImages/")
if not os.path.isdir(image_dir):
os.mkdir(image_dir)
clear_hidden_files(image_dir)
yolo_labels_dir = os.path.join(work_sapce_dir, "YOLOLabels/")
if not os.path.isdir(yolo_labels_dir):
os.mkdir(yolo_labels_dir)
clear_hidden_files(yolo_labels_dir)
yolov5_images_dir = os.path.join(data_base_dir, "images/")
if not os.path.isdir(yolov5_images_dir):
os.mkdir(yolov5_images_dir)
clear_hidden_files(yolov5_images_dir)
yolov5_labels_dir = os.path.join(data_base_dir, "labels/")
if not os.path.isdir(yolov5_labels_dir):
os.mkdir(yolov5_labels_dir)
clear_hidden_files(yolov5_labels_dir)
yolov5_images_train_dir = os.path.join(yolov5_images_dir, "train/")
if not os.path.isdir(yolov5_images_train_dir):
os.mkdir(yolov5_images_train_dir)
clear_hidden_files(yolov5_images_train_dir)
yolov5_images_test_dir = os.path.join(yolov5_images_dir, "val/")
if not os.path.isdir(yolov5_images_test_dir):
os.mkdir(yolov5_images_test_dir)
clear_hidden_files(yolov5_images_test_dir)
yolov5_labels_train_dir = os.path.join(yolov5_labels_dir, "train/")
if not os.path.isdir(yolov5_labels_train_dir):
os.mkdir(yolov5_labels_train_dir)
clear_hidden_files(yolov5_labels_train_dir)
yolov5_labels_test_dir = os.path.join(yolov5_labels_dir, "val/")
if not os.path.isdir(yolov5_labels_test_dir):
os.mkdir(yolov5_labels_test_dir)
clear_hidden_files(yolov5_labels_test_dir)
train_file = open(os.path.join(wd, "yolov5_train.txt"), 'w')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'w')
train_file.close()
test_file.close()
train_file = open(os.path.join(wd, "yolov5_train.txt"), 'a')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'a')
list_imgs = os.listdir(image_dir) # list image files
prob = random.randint(1, 100)
print("Probability: %d" % prob)
for i in range(0,len(list_imgs)):
path = os.path.join(image_dir,list_imgs[i])
if os.path.isfile(path):
image_path = image_dir + list_imgs[i]
voc_path = list_imgs[i]
(nameWithoutExtention, extention) = os.path.splitext(os.path.basename(image_path))
(voc_nameWithoutExtention, voc_extention) = os.path.splitext(os.path.basename(voc_path))
annotation_name = nameWithoutExtention + '.xml'
annotation_path = os.path.join(annotation_dir, annotation_name)
label_name = nameWithoutExtention + '.txt'
label_path = os.path.join(yolo_labels_dir, label_name)
prob = random.randint(1, 100)
print("Probability: %d" % prob)
if(prob < TRAIN_RATIO): # train dataset
if os.path.exists(annotation_path):
train_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_train_dir + voc_path)
copyfile(label_path, yolov5_labels_train_dir + label_name)
else: # test dataset
if os.path.exists(annotation_path):
test_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_test_dir + voc_path)
copyfile(label_path, yolov5_labels_test_dir + label_name)
train_file.close()
test_file.close()
只需要改动上述加了注释的几个地方
最后展示:
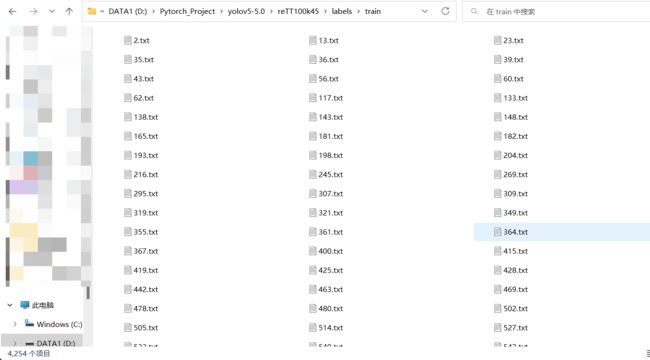
可能上述的东西你可以直接通过其他途径获得,但是下面的东西就需要注意了,是重点!
部署和训练深度学习项目
克隆项目
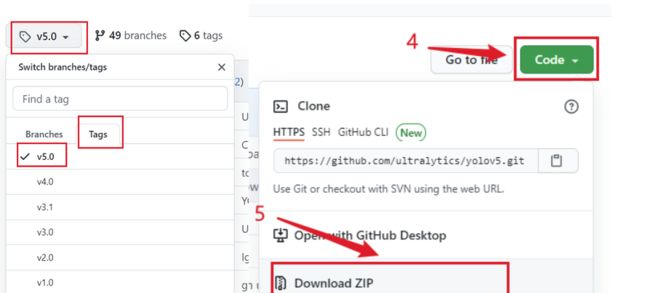
YOLOv5的代码是开源的,因此我们可以从github上克隆其源码。不得不说GitHub的确是全球最大的男性交友网站,里面的人个个都是人才,yolov5发布才一年左右的时间,YOLOv5就已经更新了5个分支了,分别是yolov5.1-yolov5.5分支。该项目就是利用的yolov5.5分支来作为讲解。
首先打开yolov5的github的官网(这个网站在国外打开是很慢的,而且是有的时候能正常打开,有的时候是进不去的,但是大家第一次打不开的话,一定要多打开几次。)打开的官网界面如下,这个就是大神glenn-jocher开源的yolov5的项目。
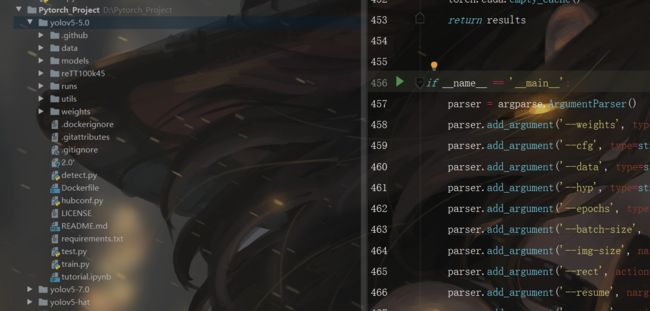
现在来对代码的整体目录做一个介绍:
├── data:主要是存放一些超参数的配置文件(这些文件(yaml文件)是用来配置训练集和测试集还有验证集的路径的,其中还包括目标检测的种类数和种类的名称);还有一些官方提供测试的图片。如果是训练自己的数据集的话,那么就需要修改其中的yaml文件。但是自己的数据集不建议放在这个路径下面,而是建议把数据集放到yolov5项目的同级目录下面。
├── models:里面主要是一些网络构建的配置文件和函数,其中包含了该项目的四个不同的版本,分别为是s、m、l、x。从名字就可以看出,这几个版本的大小。他们的检测测度分别都是从快到慢,但是精确度分别是从低到高。这就是所谓的鱼和熊掌不可兼得。如果训练自己的数据集的话,就需要修改这里面相对应的yaml文件来训练自己模型。
├── utils:存放的是工具类的函数,里面有loss函数,metrics函数,plots函数等等。
├── weights:放置训练好的权重参数。
├── detect.py:利用训练好的权重参数进行目标检测,可以进行图像、视频和摄像头的检测。
├── train.py:训练自己的数据集的函数。
├── test.py:测试训练的结果的函数。
├──requirements.txt:这是一个文本文件,里面写着使用yolov5项目的环境依赖包的一些版本,可以利用该文本导入相应版本的包。
以上就是yolov5项目代码的整体介绍。我们训练和测试自己的数据集基本就是利用到如上的代码。
数据最好放在最外一级目录中,然后数据集的目录格式如下图所示。大家一定要严格按我的格式来,否则非常容易出问题。
打开requirements.txt这个文件,可以看到里面有很多的依赖库和其对应的版本要求。我们打开pycharm的命令终端,在中输入如下的命令,就可以安装了。
pip install -r requirements.txt
如果你之前使用的是我的环境,那么此处就不需要安装了,我的里面已经安装好了
获得预训练权重
一般为了缩短网络的训练时间,并达到更好的精度,我们一般加载预训练权重进行网络的训练。而yolov5的5.0版本给我们提供了几个预训练权重,我们可以对应我们不同的需求选择不同的版本的预训练权重。通过如下的图可以获得权重的名字和大小信息,可以预料的到,预训练权重越大,训练出来的精度就会相对来说越高,但是其检测的速度就会越慢。预训练权重可以通过这个网址进行下载,本次训练自己的数据集用的预训练权重为yolov5s.pt。

训练自己的模型
预训练模型和数据集都准备好了,就可以开始训练自己的yolov5目标检测模型了,训练目标检测模型需要修改两个yaml文件中的参数。一个是data目录下的相应的yaml文件,一个是model目录文件下的相应的yaml文件。
修改data目录下的相应的yaml文件。找到目录下的voc.yaml文件,将该文件复制一份,将复制的文件重命名,最好和项目相关,这样方便后面操作。

打开这个文件夹修改其中的参数,首先将箭头1中的那一行代码注释掉(我已经注释掉了),如果不注释这行代码训练的时候会报错;箭头2中需要将训练和测试的数据集的路径填上(最好要填绝对路径,有时候由目录结构的问题会莫名奇妙的报错);箭头3中需要检测的类别数,我这里是识别交通标志物,所以这里填写45;最后箭头4中填写需要识别的类别的名字(必须是英文或者自定义ID,否则会乱码识别不出来)。到这里和data目录下的yaml文件就修改好了。
修改模型配置文件

至此,相应的配置参数就修改好了。
如果上面的数据集和两个yaml文件的参数都修改好了的话,就可以开始yolov5的训练了。首先我们找到train.py这个py文件。
然后找到主函数的入口,这里面有模型的主要参数。模型的主要参数解析如下所示。
if __name__ == '__main__':
"""
opt模型主要参数解析:
--weights:初始化的权重文件的路径地址
--cfg:模型yaml文件的路径地址
--data:数据yaml文件的路径地址
--hyp:超参数文件路径地址
--epochs:训练轮次
--batch-size:喂入批次文件的多少
--img-size:输入图片尺寸
--rect:是否采用矩形训练,默认False
--resume:接着打断训练上次的结果接着训练
--nosave:不保存模型,默认False
--notest:不进行test,默认False
--noautoanchor:不自动调整anchor,默认False
--evolve:是否进行超参数进化,默认False
--bucket:谷歌云盘bucket,一般不会用到
--cache-images:是否提前缓存图片到内存,以加快训练速度,默认False
--image-weights:使用加权图像选择进行训练
--device:训练的设备,cpu;0(表示一个gpu设备cuda:0);0,1,2,3(多个gpu设备)
--multi-scale:是否进行多尺度训练,默认False
--single-cls:数据集是否只有一个类别,默认False
--adam:是否使用adam优化器
--sync-bn:是否使用跨卡同步BN,在DDP模式使用
--local_rank:DDP参数,请勿修改
--workers:最大工作核心数
--project:训练模型的保存位置
--name:模型保存的目录名称
--exist-ok:模型目录是否存在,不存在就创建
"""
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default='yolov5s.pt', help='initial weights path')
parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
parser.add_argument('--hyp', type=str, default='data/hyp.scratch.yaml', help='hyperparameters path')
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs')
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes')
parser.add_argument('--rect', action='store_true', help='rectangular training')
parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
parser.add_argument('--notest', action='store_true', help='only test final epoch')
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')
parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
parser.add_argument('--workers', type=int, default=8, help='maximum number of dataloader workers')
parser.add_argument('--project', default='runs/train', help='save to project/name')
parser.add_argument('--entity', default=None, help='W&B entity')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--quad', action='store_true', help='quad dataloader')
parser.add_argument('--linear-lr', action='store_true', help='linear LR')
parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
parser.add_argument('--upload_dataset', action='store_true', help='Upload dataset as W&B artifact table')
parser.add_argument('--bbox_interval', type=int, default=-1, help='Set bounding-box image logging interval for W&B')
parser.add_argument('--save_period', type=int, default=-1, help='Log model after every "save_period" epoch')
parser.add_argument('--artifact_alias', type=str, default="latest", help='version of dataset artifact to be used')
opt = parser.parse_args()
训练自己的模型需要修改如下几个参数就可以训练了。首先将weights权重的路径填写到对应的参数里面,然后将修好好的models模型的yolov5s.yaml文件路径填写到相应的参数里面,最后将data数据的hat.yaml文件路径填写到相对于的参数里面。这几个参数就必须要修改的参数。

到了这一步差不多都可以,训练了
如果运行之后出现报错,直接百度即可,都是可以解决的
https://www.yht7.com/news/208540
https://zhuanlan.zhihu.com/p/366225937
https://zhuanlan.zhihu.com/p/516662016
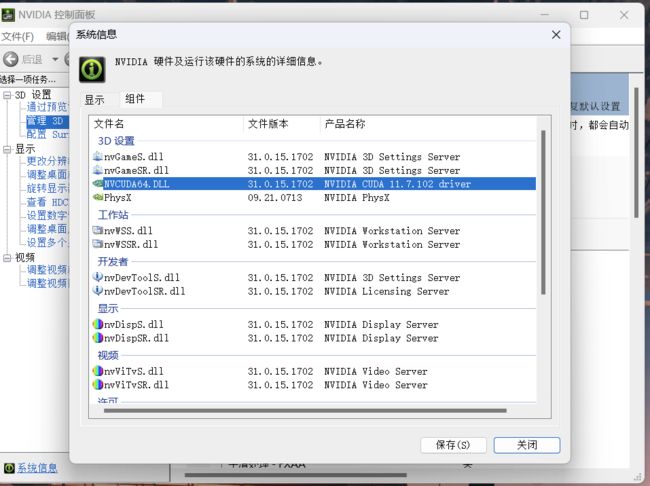
训练的时候,我们发现为啥这些指标都是0,通过一番捣鼓之后,发现是cuda的版本安装的不一样
启用tensorbord查看参数
yolov5里面有写好的tensorbord函数,可以运行命令就可以调用tensorbord,然后查看tensorbord了。首先打开pycharm的命令控制终端,输入如下命令,就会出现一个网址地址,将那行网址复制下来到浏览器打开就可以看到训练的过程了
切换到该工程路径下
tensorboard --logdir=runs/train
后面就可以让它慢慢训练了,然后进行测试
每文一语
开始也是一种学习