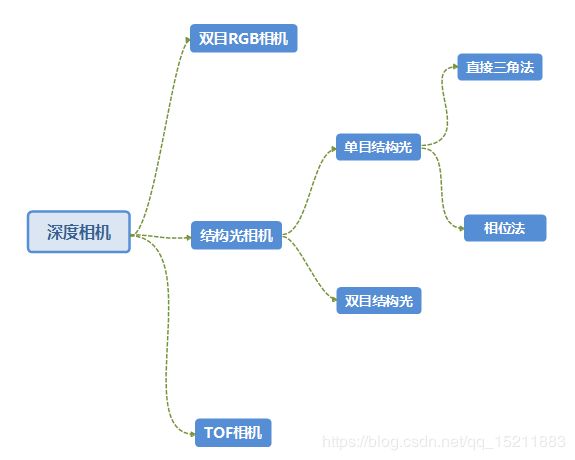
深度相机(3D相机)
二维图片,人眼可以通过物体的相对位置关系判断物体距离的远近,而相机则不可以。
深度相机(3D相机)就是终端和机器人的眼睛,其就是通过该相机能检测出拍摄空间的景深距离。通过深度相机获取到图像中每个点距离摄像头的距离,在加上该点在 2D 图像中的二维坐标,就能获取图像中每个点的三维空间坐标。
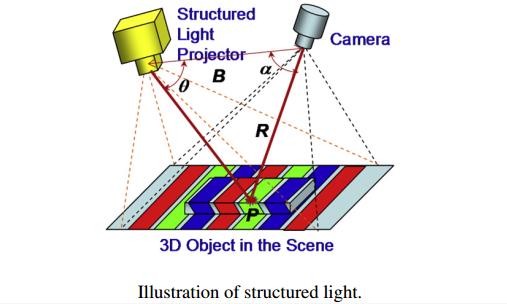
结构光(Structured-light)
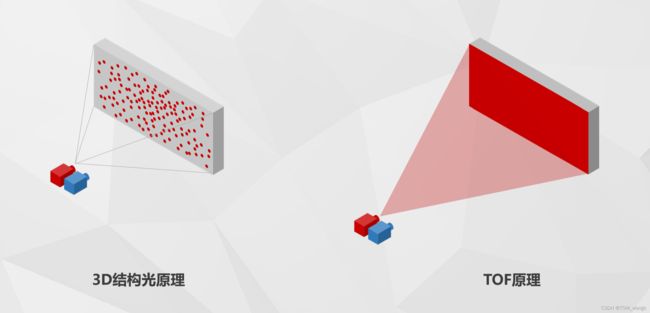
其原理是基本原理是,通过近红外激光器,将具有一定结构特征的光线投射到被拍摄物体上,再由专门的红外摄像头进行采集。这种具备一定结构的光线( 根据编码图案不同一般有条纹结构光enshape ,编码结构光Mantis Vision, Realsense(F200), 散斑结构光apple(primesense)),会因被摄物体的不同深度区域,而采集反射的结构光图案的信息,然后通过运算单元将这种结构的变化换算成深度信息,以此来获得三维结构。
简单来说就是,通常采用特定波长的不可见的红外激光作为光源,它发射出来的光经过 一定的编码投影在物体上,通过一定算法计算返回的编码图案的畸变来得到物体的位置和深度信息。
结构光深度相机的分类:主要分为单目结构光和双目结构光相机。
单目结构光容易受光照的影响,在室外环境下,如果是晴天,激光器发出的编码光斑容易太阳光淹没掉。
双目结构光可以在室内环境下使用结构光测量深度信息,在室外光照导致结构光失效的情况下转为纯双目的方式,其抗环境干扰能力、可靠性更强,深度图质量有更大提升空间。
此外,结构光方案中的激光器寿命较短,难以满足7*24小时的长时间工作要求,其长时间连续工作很容易损坏。因为单目镜头和激光器需要进行精确的标定,一旦损坏,替换激光器时重新进行两者的标定是非常困难的。
由于结构光主动投射编码光,因而适合在光照不足(甚至无光)、缺乏纹理的场景使用。
3D结构光目前的使用场景为:
第一,物体信息分割与识别,3D人脸识别,用于安全验证、金融支付等场景;
第二,体感手势识别,为智能终端提供新的交互方式;
第三,三维场景重建,利用深度相机生成的深度信息(点云数据),结合RGB彩色图像信息,可完成对三维场景的还原,可用于测距,虚拟装修等场景。
例子:

iPhone-X上的True-depth相机,这种是散斑结构光方案,通过投射人眼不可见的伪随机散斑红外光点到物体上,每个伪随机散斑光点和它周围一定范围内的点集在空间分布中的每个位置都是唯一的,并将预先进行了存储。这些散斑投影在被观察物体上的大小和形状根据物体和相机的距离和方向而不同,由此计算深度信息。
双目视觉(Stereo-vision)
基于视差原理并利用成像设备 从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息。
RGB双目相机因为非常依赖纯图像特征匹配,所以在光照较暗或者过度曝光的情况下效果都非常差,另外如果被测场景本身缺乏纹理,也很难进行特征提取和匹配。

双目相机的主要优点有:
1)硬件要求低,成本也低。普通 CMOS 相机即可。
2)室内外都适用。只要光线合适,不要太昏暗。
但是双目的缺点也是非常明显:
1)对环境光照非常敏感。光线变化导致图像偏差大,进而会导致匹配失败或精度低
2)不适用单调缺乏纹理的场景。双目视觉根据视觉特征进行图像匹配,没有特征会导致匹配失败。
3)计算复杂度高。该方法是纯视觉的方法,对算法要求高,计算量较大。
4)基线限制了测量范围。测量范围和基线(两个摄像头间距)成正比,导致无法小型化。
光飞行时间法(TOF Time-Of-Flight)
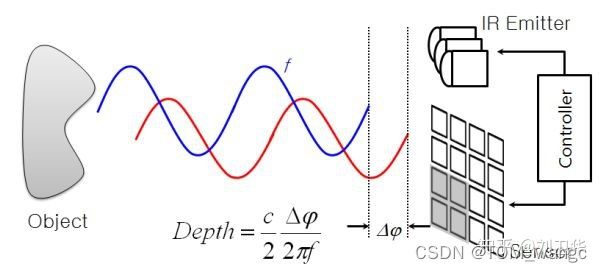
通过红外发射器发射调制过的光脉冲,遇到物体反射后,用接收器接收反射回来的光脉冲,并根据光脉冲的往返时间计算与物体之间的距离。
这种调制方式对发射器和接收器的要求较高,光速那么快,对于时间的测量有极高的精度要求。
在实际应用中,通常调制成脉冲波(一般是正弦波),当遇到障碍物发生漫反射,再通过特制的CMOS传感器接收反射的正弦波,这时波形已经产生了相位偏移,通过相位偏移可以计算物体到深度相机的距离。
ToF技术也是有一些局限性
- 当拍摄物体具有多个棱角时,会造成光线折射返回到摄像头,导致测量结果失真。
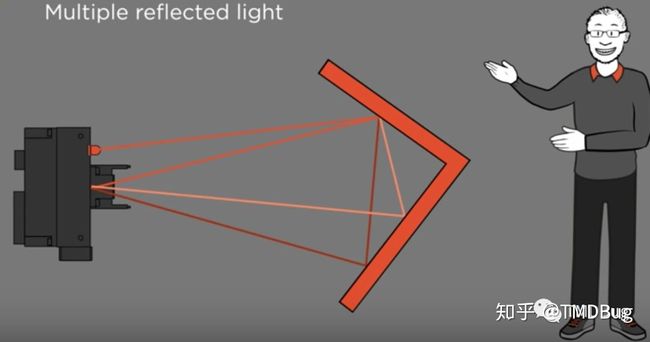
- 强烈的阳光也会导致镜头芯片快速饱和无法检测红外的真实性,导致失真。
- 如果有多台ToF设备在进行工作时,会导致红外传入其他镜头中,形成互相干扰,导致失真。
TOF技术同结构光技术不同,其发射的是持续不断的“面光源”。光线遇到不可穿透物体会发生反射。利用这一原理,通过记录反射光达到接收器的时间,由于光速和光波长已知,理论上便能快速计算出光源与物体的距离,由此得到一张被测物体的3D图像。
| 相机类型 | TOF飞行时间 | RGB双目 | 结构光(单目/双目) |
| 测距方式 | 主动式 | 被动式 | 主动式 |
| 测量范围 | 受光源强度限制,测量范围是几十米以内,测量精度在毫米级别 | 受光照,基线的限制,测量精度在厘米级别 | 受光斑图案限制,测量范围是十米之内,测量精度在毫米精度 |
| 影响因素 | 不受光照变化和物体纹理影响,受多重反射,环境光的影响 | 受光照变化和物体纹理影响很大,在晚上无法使用 | 不受光照变化和物体纹理影响,受反光的影响 |
| 户外工作 | 功率小时会受到影响 | 不受影响 | 有影响,和编码图案的设计有关 |
| 功耗 | 很大,因为需要全照射 | 很低,纯软件 | 中等,只需要投射图案到部分区域, |
| 帧率 | 上百fps | 大,小均有 | 几十fps,一般为30fps |