CVPR 2022 | Transformer再屠榜!南大提出MixFormer:端到端目标跟踪新网络
点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
作者:王利民 | 已授权转载(源:知乎)编辑:CVer
https://zhuanlan.zhihu.com/p/485189978
本文介绍一下我们在单目标跟踪(VOT)领域的新工作 MixFormer——基于 transformer 的简洁的端到端模型。MixFormer打破了传统的跟踪范式,通过模板与测试样本混合的backbone加上一个简单的回归头直接出跟踪结果,并且不使用框的后处理、多尺度特征融合策略、positional embedding等。目前在 LaSOT, TrackingNet, VOT2020, GOT-10k 等多个数据集上取得了 SOTA 效果,其中VOT2020 EAO达到了0.555,LaSOT和TrackingNet的Norm Precision指标达到了79.9%和88.9%。论文和代码及模型已开源:
MixFormer: End-to-End Tracking with Iterative Mixed Attention
代码(刚刚开源):
https://github.com/MCG-NJU/MixFormer
论文:https://arxiv.org/abs/2203.11082
1. 研究动机
目前视觉跟踪领域流行的 tracker 范式通常是多阶段的 pipeline,主要包括三个组件:(1)CNN backbone 提取 target 和 search area 的特征;(2)一个独立的融合模块来实现 target 和 search area 间的信息交流,使得能够做到 target-aware localization;(3)一个预测头 tracking head 来精确定位目标,估计 bounding box。其中特征融合模块通常是跟踪算法设计的关键,传统的方法中主要使用基于互相关(correlation)的操作(如 SiamFC, SiamRPN, SiamFC++)以及在线更新的方法(如KCF, ATOM, DiMP, FCOT等)。近来受 tranformer 在视觉领域的启发,基于注意力机制的信息融合方法被引入,并取得了非常有效的效果(如 TransT, STARK, TrDiMP, TREG等)。
而即使这些基于 transformer 的模型依然依赖于 CNN 来提取特征,受限于全局建模的能力,使得这些模型并没有在 tracking pipeline 中完全发挥出 self-attention 的能力。于是我们希望克服这个问题,提出了全新的跟踪框架 MixFormer,一改传统的跟踪范式,提出了 MAM 模块,应用 attnetion 机制同时进行特征提取与信息交互,这使得我们的模型极其简洁,没有额外的融合模块。
2. 方法
网络整体架构
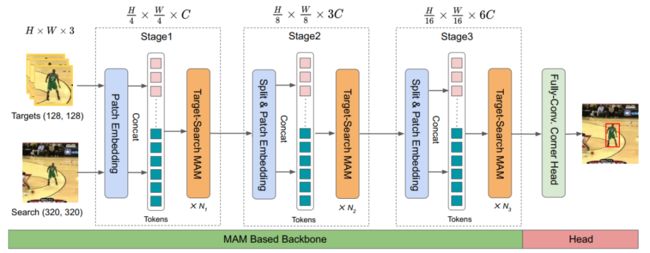
网络结构只有两个模块,一个是基于本文提出的mixed attention module (MAM)的骨干网络用来提取和融合特征,最后连接一个预测头进行定位。feature map 呈现金字塔型变化,即随着网络的加深,分辨率逐渐变小,通道数逐渐增大。MixFormer是一个端到端模型,所以没有任何框后处理操作。
混合注意力模块(Mixed Attention Module, MAM)
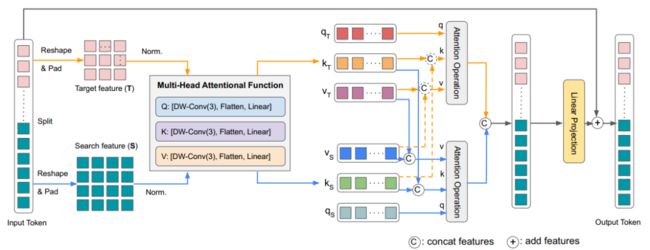
混合注意力模块(MAM)是我们框架中的核心设计,它的输入是 template 和 search area拼接 的 token sequence。因为我们希望能够同时做到特征提取和特征融合,所以不同于原始的 Multi Head Attention,MAM 首先会将输入 split 成 template 和 search area,然后同时进行 self-attention和 cross-attention。此外,我们采用了一种非对称式混合attention:删去了从 target(模板) 到 search (搜索区域)的 query ,这样做既是为了避免目标模板被动态的搜索区域影响,更重要的是能提高跟踪效率。因为target不受到search变化的影响,这样的话就可以将多个模板存为memory,不需要每帧search变化的时候重新生成。具体的实现细节可以参考我们的论文。
定位头(Localization Head)
为了验证我们提出的框架,MixFormer在两个简单的localization heads上进行实验:corner head和token head。其中Corner head借鉴了STARK,但是没有像STARK那种在head中进行decoder和encoder的融合操作,仅包括几个卷积层来定位角点并出框。另外,我们也实验了类似 DETR 的基于 query based 的 localization head,在最后一个阶段加上一个可学习的 regression token,最后直接对其过一个 FFN 回归坐标。这个方法同样也取得了不错的结果,这证明我们的 MAM backbone 也具有很好的泛化能力。
在线样本置信度预测模块(SPM)
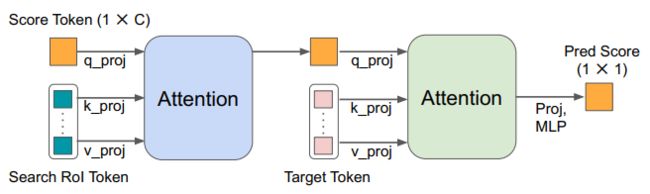
动态更新的 template 通常在获取时序信息和保持跟踪鲁棒上十分重要,尤其在目标发生变形等情况时,然而不正确的目标选取会使得跟踪结果更加糟糕。我们提出了一个 Score Prediction Module (SPM),根据预测得分来选取可靠的 online template。结构如图所示,具体细节可以参照论文。
3. 实验
多个benchmarks对比

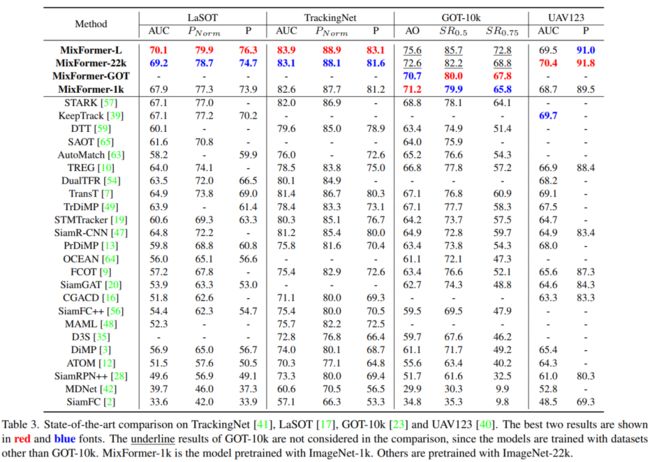
我们将 MixFormer 和其他方法在主流的单目标跟踪数据集进行了测试,包括 VOT2020/GOT-10k/UAV123 几个重要的短时数据集以及 LaSOT 和 TrackingNet 两个较大的数据集,其中 MixFormer-L 在VOT2020数据集上的 EAO 达到了0.555,相较此前的 STARK 提升了 5%,此外在 TrackingNet 和 LaSOT 数据集的 Success 和 Normalized Precision 也提升很大,在GOT-10k等数据集上也达到了SOTA的效果。
探究实验
我们从多个角度进行了消融实验分析:
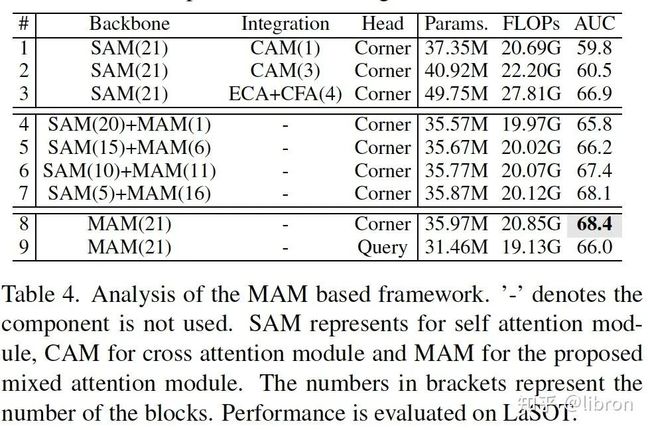
- 相较分离处理的框架先 self-attention (SAM) 提特征再 cross-attention (CAM) 融合信息,我们的特征提取和信息融合统一的结构更加有效,因为在这种耦合的模式下它们能够相互促进。
- 在不改变 attention 个数的情况下,我们将部分 MAM 替换成了 template 和 search 各自做 self-attention,也即没有了信息的交流。我们发现不同层次进行 MAM 会得到更好的性能,这更加说明了 extensive target-aware feature extraction and hierarchical information integration 是十分重要的。
- 对于定位头,我们测试了 fully convolutional corner head 和 query-based head,其中使用 corner head 的性能也比query-based head效果更好。
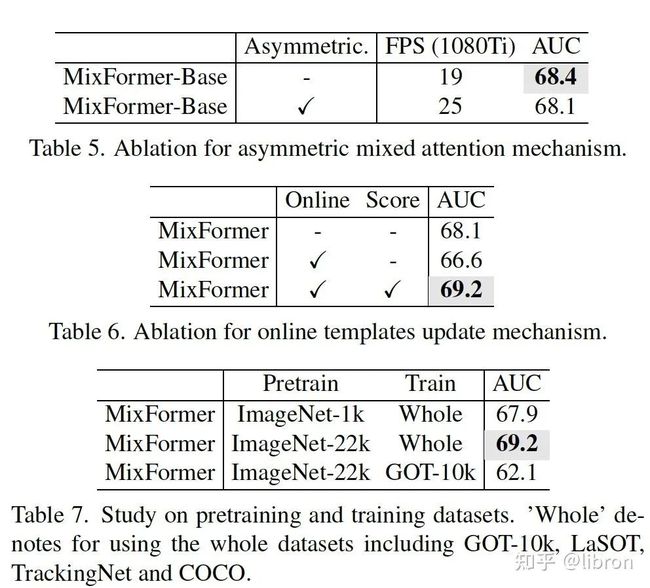
- 为了减少计算开销我们使用了 asymmetric attention,实验可以看出在损失微小性能的情况下运行速度提升了 24%。
- 当我们进行随机间隔采样更新 online template,结果变得更坏了,而加上得分预测模块之后取得了最好的 AUC。这说明合理地选择可靠的 online template 是非常重要的。
- 为了检验 mixformer 的泛化性能,我们在不同的 pretrain 模型和数据上进行分析,只在 ImageNet-1k 上 pretrain 的 mixformer 依然超越了此前的所有 sota tracker。
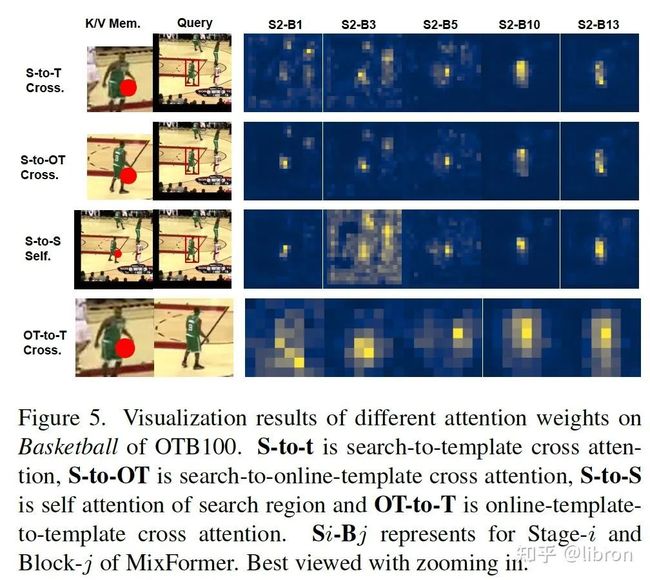
Attention weights可视化
更多可视化的例子与分析可以参照论文。
4. 总结
MixFormer革新了传统的跟踪范式,统一了特征提取和目标融合模块,既简化了模型也提升了跟踪的性能,希望我们的研究能够进一步推进视觉跟踪领域的研究。也非常欢迎大家能在自己的tracker上尝试一些我们的MixFormer backbone~
MixFormer 论文和代码下载
后台回复:MixFormer,即可下载上面论文和代码
Transformer和目标跟踪交流群成立
扫描下方二维码,或者添加微信:CVer6666,即可添加CVer小助手微信,便可申请加入CVer-Transformer 或者目标跟踪微信交流群。另外其他垂直方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch、TensorFlow和Transformer等。
一定要备注:研究方向+地点+学校/公司+昵称(如Transformer+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群
▲扫码或加微信: CVer6666,进交流群
CVer学术交流群(知识星球)来了!想要了解最新最快最好的CV/DL/ML论文速递、优质开源项目、学习教程和实战训练等资料,欢迎扫描下方二维码,加入CVer学术交流群,已汇集数千人!
▲扫码进群
▲点击上方卡片,关注CVer公众号
整理不易,请点赞和在看