特征提取 - 骨架、中轴和距离变换
目录
1. 介绍
骨架 skeleton
中轴变换 Medial axis transformation
距离变换 distance transform
2. 距离变换的代码实现
distanceTransform 函数介绍
normalize 函数介绍
取局部最大值
完整代码
3. comparation
1. 介绍
骨架 skeleton
骨架的定义:就是目标的前景像素点集合内部最大的内切圆盘,将所有的内切圆盘的圆心连起来就是骨架
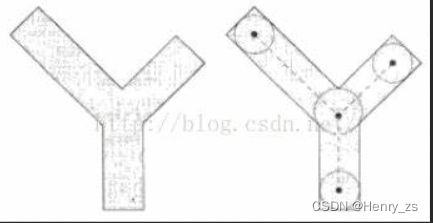
一个骨架的区域就是这个 区域中与区域边界 等距 的集合,
骨架的实现可以参考这篇文章:形态学 - 骨架 和 形态学 - 细化
中轴变换 Medial axis transformation
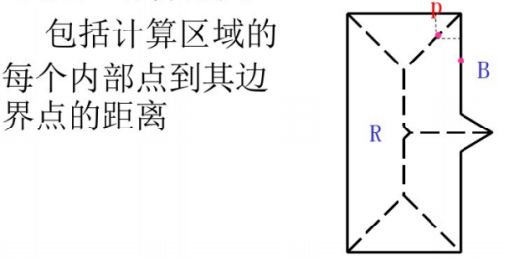
中轴变换可以计算前景区域的中轴,一个区域的骨架就定义为这个区域的中轴
它的中轴定义如下:R 是前景区域 , B 是前景区域的边界 。如果 前景区域 R 中的每个点p,在边界B中找到最近的点。如果这个最近的点不是唯一的,那么点p定义为前景区域R的中轴
骨架其实就是物品最中间的那根轴,因此这个轴到周围边界的距离应该是相等的
中轴的概念可以用 '草原大火' 的概念去理解:
- 把图像处理成二值图像,在前景区域的边界处点火
- 火焰会以同样的速度向前景区域蔓延,
- 那么中轴就是火焰接触的集合
距离变换 distance transform
中轴变换需要计算大量的点到边界的距离,可以通过距离变换去代替
距离变换的意思是,对于一副二值图像而言。前景区域(非0)到最近的背景区域(0值)的距离

因此,距离变换后的图像是一副灰度图像,灰度值的大小与前景像素点距离背景区域的远近成正相关。也就是说,图像越亮--->灰度值越大--->距离背景越远,那么骨架就是定义为距离变换后的局部极大值的区域
这里书上的介绍是 '脊' ,也就是局部极大值的集合。因为没有介绍局部极大值的范围,下面代码的实现是 4邻域
2. 距离变换的代码实现
因为形态学的骨架提取之前已经介绍过了,这里不再介绍
而中轴变换等效于距离变换,因此这里只介绍距离变换的代码

如上述代码,首先将图像进行 OTSU 二值化,然后对二值图像进行距离变换
distanceTransform 函数介绍
第二个参数计算距离的方法,常用的有下面几种
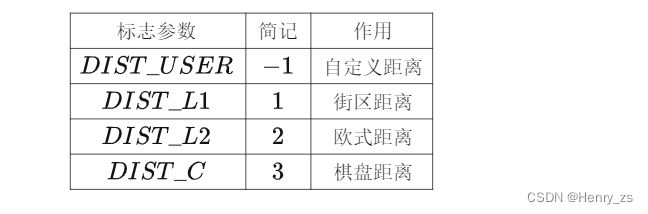
第三个参数为 maskSize:距离变换掩码矩阵的大小
- 当选择使用街区距离时,掩码尺寸选择3×3还是5×5对计算结果都没有影响,因此为了加快函数运算速度,默认选择掩码尺寸为3×3
- 当选择欧式距离时,掩码尺寸为3×3时是粗略的计算两个像素之间的距离,而当掩码尺寸为5×5时是精确的计算两个像素之间的距离,精确计算与粗略计算两者之间存在着较大的差异,因此在使用欧式距离时推荐使用5×5掩码
- 当选择棋盘距离时,掩码的尺寸对计算结果也没有影响,因此可以随意选择
normalize 函数介绍
因为图像的返回是浮点型的数据或者灰度值往往不大,是一副几乎全黑的图像,因此这里对图像进行了放缩 normalize
这里只对下面这串代码介绍:
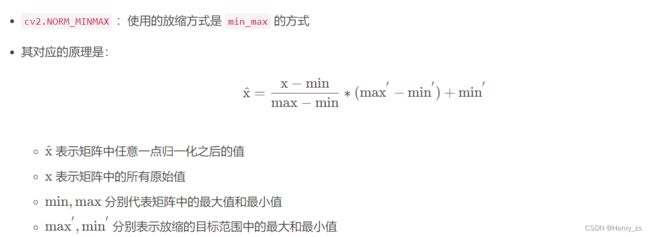
img_dst = cv2.normalize(img_dst, None, 0, 255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U) 0,255 代表缩放后图像的灰度值在 0-255之间
cv2.NORM_MINMAX 代表:
取局部最大值
距离变换后,取最大值的代码为

其实就是二维矩阵求取局部最大值,但是需要注意的是,我们是不对背景区域求取局部极值的
注:这里局部的范围是 4邻域
完整代码
import cv2
import numpy as np
def local_maximum(x): # 取局部最大值
dst = np.zeros(x.shape, dtype=np.uint8) # 处理的结果
height,width = x.shape[:2]
for i in range(1, height - 1):
for j in range(1, width - 1):
if x[i][j] != 0:
if (x[i][j] >= x[i - 1][j]) and (x[i][j] >= x[i + 1][j]) and (x[i][j] >= x[i][j - 1]) and (x[i][j] >= x[i][j + 1]):
dst[i][j] = 255
return dst
img = cv2.imread('./img.jpg',0)
_, img_bin = cv2.threshold(img,0,255,cv2.THRESH_OTSU+cv2.THRESH_BINARY) # 二值化图像
img_dst = cv2.distanceTransform(img_bin,cv2.DIST_L2,5) # 距离变换
img_dst = cv2.normalize(img_dst, None, 0, 255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U) # 归一化,为了方便显示
ret = local_maximum(img_dst) # 取距离变换后的局部最大值
cv2.imshow('img',np.hstack((img_bin,img_dst,ret)))
cv2.waitKey()
cv2.destroyAllWindows()
处理的结果为:二值图、距离变换图、骨架

3. comparation
对同一幅图像用 细化 、 骨架抽取 、距离变换 方法比较
细化的结果为:

骨架抽取的结果为:

距离变换的结果:

可以发现,细化的结果会有小的毛刺。距离变换产生了不连续的骨架