Android MTK PDAF流程
PDAF:Phase Detection Auto Focus
PDAF sensor的实现原理(SPC结构):

PDAF通过比较L/R PD pixel构成的两幅图像,PD算法会计算出当前的相位差,根据相位差和模组的PD calibration data,估算出像距,从而移动lens快速对焦,PDAF快速对焦的搜索范围[infinity,macro]主要来自于烧录的OTP中的AF段,此距离并未实际与物体的物理距离即转换后的DAC值。PDAF OTP中主要烧录以上的SPC(shield pixel calibration)用于补偿遮光后的亮度增益,DCC(defocus conversion coefficient)主要是用于将相位差转换为Lens移动的距离,DCC中数值是通用过PD Diff 与DAC的关系拟合一条曲线的斜率(即PDAF线性度斜率)
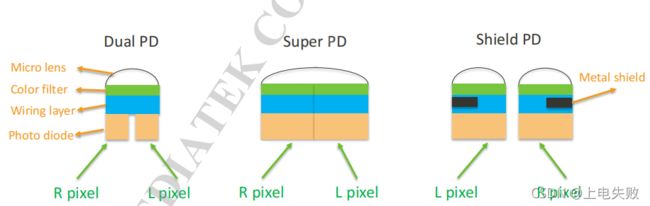
PD pixel types主要有以下三类,Dual PD、Super PD、Shield PD。
目前接触使用的都是Shield PD(像素点有一半会被遮挡),信噪比SNR一般是越大越好(S/N S表示摄像机在假设无噪声时的图像信号值,N表示摄像机本身产生的噪声值);Shield PD 信噪比SNR一般比较差,但是能支持大尺寸像素;
Dual PD指每一个像素底部的感光区域一分为二,在同一个像素内即可获得相位差,也称2PD,全像素双核对焦,PD点覆盖率100%;
Super PD相邻两个像素共用一个micor lens(微透镜用于提高感光度)得到相位差信息
CMOS传感器的结构:1.微透镜 2.色彩滤镜 3.感光片(光电二极管)4.高速传输电路 (Mono sensor没有色彩滤镜,黑白)
SensorType:不同的类型主要是针对PD pixel和PD value是由sensor还是ISP处理;接触较多的Type 2 PDAF_SUPPORT_CAMSV
| Sensor Type | Character | Porting guide |
|---|---|---|
| Type1 | PD pixel corrected by sensor PD value calculate by sensor |
Type1 PDAF porting |
| Type2 | PD pixel corrected by sensor PD pixel output to ISP via VC |
Type2 PDAF porting |
| Type3 | PD pixel corrected by ISP PD pixel extracted by ISP from raw image PD pixel extracted by PDAF algo on ISP3.0 |
Type3 PDAF porting |
| Dual PD | No need to correct PD pixel PD pixel extracted by ISP, under mode 1 PD pixel output to ISP under mode 3 |
DualPD PDAF porting |
MTK不同SensorType的总体处理流程:

MTK PDAF Flow:

vendor/mediatek/proprietary/custom/mt6853/hal/pd_buf_mgr/src/pd_buf_mgr.cpp MTK
vendor/mediatek/proprietary/custom/mt6853/hal/pd_buf_mgr/src/pd_buf_mgr_open.cpp 3rd party
vendor/mediatek/proprietary/hardware/mtkcam/aaa/source/common/hal3a/v3.0/HAL3AFlowCtrl.cpp
vendor/mediatek/proprietary/hardware/mtkcam/aaa/source/common/utils/pdtblgen/pdtblgen.cpp
vendor/mediatek/proprietary/hardware/mtkcam/aaa/source/isp_6s/af_assist_mgr.cpp
vendor/mediatek/proprietary/custom/mt6853/hal/pd_buf_mgr/src/pd_buf_mgr.cpp
vendor/mediatek/proprietary/custom/mt6853/hal/pd_buf_mgr/src/pd_buf_mgr/xxx_mipi_raw/pd_xxx_mipiraw.cpp
vendor/mediatek/proprietary/hardware/mtkcam/drv/src/mem/common/v2/cam_cal_drv.cpp
vendor/mediatek/proprietary/hardware/mtkcam/drv/src/mem/common/v2/cam_cal_helper.cpp
vendor/mediatek/proprietary/custom/common/hal/imgsensor_src/camera_calibration_cam_cal.cpp
kernel-4.14/drivers/misc/mediatek/cam_cal/src/common/v2/eeprom_driver.c
static struct SET_PD_BLOCK_INFO_T imgsensor_pd_info_1920_1080 =
{
.i4OffsetX = 16, // x offset of PD area
.i4OffsetY = 12, // y offset of PD area
.i4PitchX = 16, // x pitch/width of a PD block
.i4PitchY = 16, // y pitch/height of a PD block
.i4PairNum = 8, // num of pairs L/R PD pixel within a PD block
.i4SubBlkW = 8, // x interval of 1 pair L/R PD pixel within a PD block
.i4SubBlkH = 4, // y interval of 1 pair L/R PD pixel within a PD block
.i4BlockNumX = 120, // PD block number in X direction
.i4BlockNumY = 67, // PD block number in Y direction
.iMirrorFlip = 0,
.i4PosR = {
{16,13}, {24,13}, {20,17}, {28,17},
{16,21}, {24,21}, {20,25}, {28,25},
},
.i4PosL = {
{17,13}, {25,13}, {21,17}, {29,17},
{17,21}, {25,21}, {21,25}, {29,25},
},
.i4Crop = { {0, 0}, {0, 0}, {1040, 960}, {0, 0}, {0, 0}, {1040,960},{0, 0}, {0, 0}, {0, 0}, {0, 0} },
};
(1) 前4个变量和L/R的坐标可直接从PD INI文档中获取
(2) i4PairNum指一个block中有几对L/R pixel
(3) i4SubBlkW 和 i4SubBlkH 分别对应PD INI文档中的 PD_DENSITY_X/Y
(4) i4BlockNumX 和 i4BlockNumY 分别对应PD INI文档中的 PD_BLOCK_NUM_X_Y
(5) iMirrorFlip 指出图方向与 模组厂 calibration出图方向的相对方向
pd_info都是从4000*3000 尺寸上操作的,原来值的计算方式是
i4BlockNumX = ( 4000 - 16 * 2 ) / 16 = 248
i4BlockNumY = ( 3000 - 12 * 2 ) / 16 = 186
由于1920*1080是crop后的,故i4BlockNumX 和 i4BlockNumY 是需要修改的 ,与otp中的是不一致的
i4BlockNumX = 1920 / 16 = 120
i4BlockNumY = 1080 / 16 = 67.5 = 67
i4Crop用于记录[Scenario][Crop] -> [x_crop][y_crop] RAW_OFFSET_X = 1040 RAW_OFFSET_Y = 960
1920*1080在驱动中用于配置SensorMode 6,应该前面一个{1040, 960}不用填,是SensorMode2
i4Crop = (4000 - 1040) / 2 (3000 - 960) / 2 = 1920 1080
vendor/mediatek/proprietary/custom/mt6853/hal/pd_buf_mgr/src/pd_buf_mgr/xxx_mipi_raw/pd_xxx_mipiraw.cpp
MBOOL PD_xxxMIPIRAW::IsSupport( SPDProfile_t &iPdProfile)
{
if (( iPdProfile.i4SensorMode == 5) && ((iPdProfile.uImgXsz == 1920) && (iPdProfile.uImgYsz == 1080)))
{
m_PDBufXSz = 240;
m_PDBufYSz = 536;
if(m_PDBuf)
{
delete m_PDBuf;
m_PDBuf = nullptr;
}
m_PDBufSz = m_PDBufXSz*m_PDBufYSz;
m_PDBuf = new uint16_t [m_PDBufSz];
ret = MTRUE;
AAA_LOGD("[1080P 60fps] is Support : i4SensorMode:%d w[%d] s[%d]\n", iPdProfile.i4SensorMode,iPdProfile.uImgXsz, iPdProfile.uImgYsz);
}
...
}
m_PDXSz代表每一行传送pixel num = PitchX / DensityX * BlockNumX = 16 / 8 * 120 = 240
m_PDYSz代表传送的行数line num = PitchY / DensityY * 2 * BlockNumY = 16 / 8 *2 *67 = 536
{//AF_NVRAM
{ // i4HybridAFCoefs1[64]
1, // [0] hybrid_default_param
37, // [1] tracking_width
38, // [2] tracking_height
3, // [3] max_pd_win_x
3, // [4] max_pd_win_y
...
{//PD_NVRAM_T
{//PD_CALIBRATION_DATA_T
{0},
0,
},//PD_CALIBRATION_DATA_T
{//PD_ALGO_TUNING_T
//--------------------------------------------------------------------------------/
// Section: PD Block Size
// Description: Determine PD block width and height
//
// i4FocusPDSizeX (width)
// i4FocusPDSizeY (height)
// range: [0] 32 to (raw_width/x_density), [0] 24 to (raw_height/y_density)
// default:
// S5K3P8: SizeX=32, SizeY=24 (density_x=16, density_y=16)
// OV13855: SizeX=32, SizeY=48 (density_x=16, density_y=8)
// IMX258: SizeX=64, SizeY=24 (density_x=8, density_y=16)
// IMX398: SizeX=64, SizeY=48 (density_x=8, y_density_y=8)
// S5K2L8: SizeX=240, SizeY=96 (density_x=2, y_density_y=4)
// constraints: must be a multiplier of 4
// effect: A large block takes longer computation time than a small block.
//--------------------------------------------------------------------------------/
28, // i4FocusPDSizeX
32, // i4FocusPDSizeY
//--------------------------------------------------------------------------------/
i4FocusPDSizeY = RAW_HIGHT * tracking_height / 100 / max_pd_win_y / PD_DENSITY_Y
= 1080 * 38 / 100 / 3 / 4 = 34.2 = 32
i4FocusPDSizex = RAW_WIDTH * tracking_width / 100 / max_pd_win_x / PD_DENSITY_X
= 1920 * 37 / 100 / 3 / 8 = 29.6 = 28
static struct SENSOR_WINSIZE_INFO_STRUCT imgsensor_winsize_info[7] = {
{8032, 6032, 0, 12, 8032, 6008, 4016, 3004, 8, 2, 4000, 3000, 0, 0, 4000, 3000}, //preview(4000 x 3000)
{8032, 6032, 0, 12, 8032, 6008, 4016, 3004, 8, 2, 4000, 3000, 0, 0, 4000, 3000}, //capture(4000 x 3000)
{8032, 6032, 0, 12, 8032, 6008, 4016, 3004, 8, 2, 4000, 3000, 0, 0, 4000, 3000}, // VIDEO (4000 x 3000)
{8032, 6032, 0, 1568, 8032, 2896, 2008, 724, 364, 2, 1280, 720, 0, 0, 1280, 720}, // hight speed video (1280 x 720)
{8032, 6032, 0, 12, 8032, 6008, 4016, 3004, 8, 2, 4000, 3000, 0, 0, 4000, 3000}, // slim video (1280 x 720)
{8032, 6032, 2080, 1932, 3872, 2168, 1936, 1084, 8, 2, 1920, 1080,0, 0, 1920, 1080}, // custom1 (1920x 1080)
{8032, 6032, 0, 14, 8032, 6004, 8032, 6004, 16, 2, 8000, 6000, 0, 0, 8000, 6000}, //remosaic (8000 x 6000)
};
8032 6032 sensor内部有效像素 crop → binning → crop 如果有还要小的尺寸还需要crop
为了保持中心一致 0 12 上下都裁剪 crop
8032-(0 * 2) 6032 -(12 * 2)= 8032 6008 再binning
4016 3004 继续上下crop
4016-(8 * 2)3004(2*2)= 4000 * 3000 最终输出 tgsize
static struct SENSOR_VC_INFO_STRUCT SENSOR_VC_INFO[4]=
{
/* Preview mode setting */
{0x02, //VC_Num
0x0a, //VC_PixelNum
0x00, //ModeSelect /* 0:auto 1:direct */
0x00, //EXPO_Ratio /* 1/1, 1/2, 1/4, 1/8 */
0x00, //0DValue /* 0D Value */
0x00, //RG_STATSMODE /* STATS divistion mode 0:16x16 1:8x8 2:4x4 3:1x1 */
0x00, 0x2B, 0x0FA0, 0x0BB8, // VC0 image data
0x00, 0x00, 0x0000, 0x0000, // VC1 MVHDR
0x01, 0x30, 0x026C, 0x05D0, // VC2 PDAF
0x00, 0x00, 0x0000, 0x0000}, // VC3
/* Capture mode setting */
/* Video mode setting */
/* Custom1 mode setting */
{0x02, //VC_Num
0x0a, //VC_PixelNum
0x00, //ModeSelect /* 0:auto 1:direct */
0x00, //EXPO_Ratio /* 1/1, 1/2, 1/4, 1/8 */
0x00, //0DValue /* 0D Value */
0x00, //RG_STATSMODE /* STATS divistion mode 0:16x16 1:8x8 2:4x4 3:1x1 */
0x00, 0x2B, 0x0780, 0x0438, // VC0 image data
0x00, 0x00, 0x0000, 0x0000, // VC1 MVHDR
0x01, 0x30, 0x012C, 0x0218, // VC2 PDAF
0x00, 0x00, 0x0000, 0x0000}, // VC3
};};
Type 2会使用VC(Virtual channel control),VC的主要作用就是将数据流的数据通过不同的通道分离给不同的流程。通过每一帧都是包含图像帧+PD 虚拟帧(将Bayer数据和PD数据按照MIPI协议打包)
图像帧(Image Data VC=0 DT=0x2B RAW10)
0x0780 = 1920 0x0438 = 1080 ;
PD 虚拟帧(PDAF Data VC=1 DT=0x30 通过date type区分通道)
0x012C = 120 * 2 * 10 / 8 = 300 //.i4BlockNumX = 120, // PD block number in X direction
0x0218 = 67 * 4 * 2 = 536 //.i4BlockNumY = 67, // PD block number in Y direction
PDAF线性度测试:
ISO<200,对着菱形图20cm 位置下,在Confidence > 60的场景下抓取log,在log里查找PD Value与AF DAC,看他们是否是呈线性关系
插入一下OTP相关的知识
LCS Lens Shade Correction gridx gridy 垂直和网格大小,周围亮度不均匀,处理不好可能经算法会有竖条纹,光晕等
BLC BlackLevel Correction 黑电平校正 (没有做黑电平校正的的图会更亮,影响图像的对比度)
sensor输出的电压越高,电流越大,而sensor电路本算存在暗电流,导致没有光线输入时也
有一定的输出电压,所以需要把这一部分去掉,所有像素都减去一个校准值,raw10对应的OB
(Optical Black)一般为64,需要注意init setting中的寄存器修改
AWB Auto White Balance RGB转成Bayer模式的图一般由(R Gr Gb B四个通道的值) ,AWB一般比较关注R/G B/G的值,
Gr Gb一般值都比较接近,R/G 变大时,意味着R gain减小,整幅图R分量少了,就会呈现泛绿泛蓝,
烧录的数据主要是当前模组和Golden模组(一批生产中较为平均的做基准)的R Gr Gb B的数据