Pytorch实现DDPG算法
文章目录
- 回顾DDPG
- 实现
- 一些trick
-
- soft-replacement
- add noise to action
DDPG是强化学习里的一种经典算法。关于算法的原理我在之前的文章里有详细介绍过: 强化学习入门8—深入理解DDPG 。
在学习莫凡大神的教程中,莫凡大神用的是tensorflow实现的DDPG。因为平时使用pytorch较多,且大神当时使用的tensorflow版本也较低,于是便借此使用pytorch复现一下DDPG。
注意:本文参考的是莫凡大神的tf版本的代码,指路 https://mofanpy.com/tutorials/machine-learning/reinforcement-learning/intro-DDPG/
回顾DDPG
DDPG即Deep Deterministic Policy Gradient,确定性策略梯度算法。它结构上基于Actor-Critic,结合DQN算法的思想,使得它不仅可以处理离散型动作问题,也可以处理连续型动作问题。
实现
话不多说,直接上代码
首先是定义Actor和Critic两个网络。
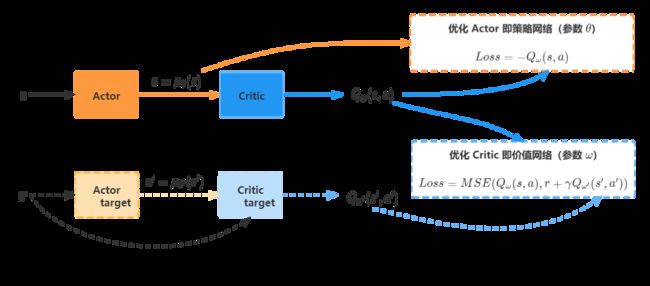
结合上面的图,Actor的输入是当前的state,然后输出的是一个确定性的action。
class Actor(nn.Module):
def __init__(self, state_dim, action_dim, action_bound):
super(Actor,self).__init__()
self.action_bound = torch.FloatTensor(action_bound)
# layer
self.layer_1 = nn.Linear(state_dim, 30)
nn.init.normal_(self.layer_1.weight, 0., 0.3) # 初始化权重
nn.init.constant_(self.layer_1.bias, 0.1)
self.output = nn.Linear(30, action_dim)
self.output.weight.data.normal_(0.,0.3) # 初始化权重
self.output.bias.data.fill_(0.1)
def forward(self, s):
a = torch.relu(self.layer_1(s))
a = torch.tanh(self.output(a))
# 对action进行放缩,实际上a in [-1,1]
scaled_a = a * self.action_bound
return scaled_a
在动作输出这里,加了一个 action bound 在,只是用于限制一下action的范围。
Critic网络输入的除了当前的state还有Actor输出的action,然后输出的是Q-value,即 Q(s,a)
class Critic(nn.Module):
def __init__(self, state_dim, action_dim):
super(Critic,self).__init__()
n_layer = 30
# layer
self.layer_1 = nn.Linear(state_dim, n_layer)
nn.init.normal_(self.layer_1.weight, 0., 0.1)
nn.init.constant_(self.layer_1.bias, 0.1)
self.layer_2 = nn.Linear(action_dim, n_layer)
nn.init.normal_(self.layer_2.weight, 0., 0.1)
nn.init.constant_(self.layer_2.bias, 0.1)
self.output = nn.Linear(n_layer, 1)
def forward(self,s,a):
s = self.layer_1(s)
a = self.layer_2(a)
q_val = self.output(torch.relu(s+a))
return q_val
网络结构的定义比较简单。下面是DDPG如何学习这关键部分。
我们知道DDPG有一个记忆库,每次学习的数据是从记忆库中随机采样得来的。这部分实现比较简单。
需要注意的是,在学习过程中,两个网络的误差是不一样的。DDPG因为借鉴了DQN的思想,除了Actor和Critic两个网络外,还定义了各自的target网络。target网络的作用是计算下一时刻的Q值,方便TD-error的更新。TD-error的定义是
t d _ e r r o r = M S E ( Q ( s , a ) , r + γ Q t a r g e t ( s ′ , a ′ ) ) td\_error=MSE(Q(s,a), r+\gamma Q_{target}(s',a')) td_error=MSE(Q(s,a),r+γQtarget(s′,a′))
Critic网络是根据 TD-error 来更新的。
# 训练critic
a_ = self.actor_target(bs_)
q_ = self.critic_target(bs_, a_)
q_target = br + self.gamma * q_
q_eval = self.critic(bs, ba)
td_error = self.mse_loss(q_target,q_eval)
而Actor网络是根据Q值来更新的,如下:
# 训练Actor
a = self.actor(bs)
q = self.critic(bs, a)
a_loss = -torch.mean(q)
这部分的完整代码如下:
class DDPG(object):
def __init__(self, state_dim, action_dim, action_bound, replacement,memory_capacticy=1000,gamma=0.9,lr_a=0.001, lr_c=0.002,batch_size=32) :
super(DDPG,self).__init__()
self.state_dim = state_dim
self.action_dim = action_dim
self.memory_capacticy = memory_capacticy
self.replacement = replacement
self.t_replace_counter = 0
self.gamma = gamma
self.lr_a = lr_a
self.lr_c = lr_c
self.batch_size = batch_size
# 记忆库
self.memory = np.zeros((memory_capacticy, state_dim * 2 + action_dim + 1))
self.pointer = 0
# 初始化 Actor 网络
self.actor = Actor(state_dim, action_dim, action_bound)
self.actor_target = Actor(state_dim, action_dim, action_bound)
# 初始化 Critic 网络
self.critic = Critic(state_dim,action_dim)
self.critic_target = Critic(state_dim,action_dim)
# 定义优化器
self.aopt = torch.optim.Adam(self.actor.parameters(), lr=lr_a)
self.copt = torch.optim.Adam(self.critic.parameters(), lr=lr_c)
# 选取损失函数
self.mse_loss = nn.MSELoss()
# 从记忆库中随机采样
def sample(self):
indices = np.random.choice(self.memory_capacticy, size=self.batch_size)
return self.memory[indices, :]
def choose_action(self, s):
s = torch.FloatTensor(s)
action = self.actor(s)
return action.detach().numpy()
def learn(self):
# soft replacement and hard replacement
# 用于更新target网络的参数
if self.replacement['name'] == 'soft':
# soft的意思是每次learn的时候更新部分参数
tau = self.replacement['tau']
a_layers = self.actor_target.named_children()
c_layers = self.critic_target.named_children()
for al in a_layers:
a = self.actor.state_dict()[al[0]+'.weight']
al[1].weight.data.mul_((1-tau))
al[1].weight.data.add_(tau * self.actor.state_dict()[al[0]+'.weight'])
al[1].bias.data.mul_((1-tau))
al[1].bias.data.add_(tau * self.actor.state_dict()[al[0]+'.bias'])
for cl in c_layers:
cl[1].weight.data.mul_((1-tau))
cl[1].weight.data.add_(tau * self.critic.state_dict()[cl[0]+'.weight'])
cl[1].bias.data.mul_((1-tau))
cl[1].bias.data.add_(tau * self.critic.state_dict()[cl[0]+'.bias'])
else:
# hard的意思是每隔一定的步数才更新全部参数
if self.t_replace_counter % self.replacement['rep_iter'] == 0:
self.t_replace_counter = 0
a_layers = self.actor_target.named_children()
c_layers = self.critic_target.named_children()
for al in a_layers:
al[1].weight.data = self.actor.state_dict()[al[0]+'.weight']
al[1].bias.data = self.actor.state_dict()[al[0]+'.bias']
for cl in c_layers:
cl[1].weight.data = self.critic.state_dict()[cl[0]+'.weight']
cl[1].bias.data = self.critic.state_dict()[cl[0]+'.bias']
self.t_replace_counter += 1
# 从记忆库中采样bacth data
bm = self.sample()
bs = torch.FloatTensor(bm[:, :self.state_dim])
ba = torch.FloatTensor(bm[:, self.state_dim:self.state_dim + self.action_dim])
br = torch.FloatTensor(bm[:, -self.state_dim - 1: -self.state_dim])
bs_ = torch.FloatTensor(bm[:,-self.state_dim:])
# 训练Actor
a = self.actor(bs)
q = self.critic(bs, a)
a_loss = -torch.mean(q)
self.aopt.zero_grad()
a_loss.backward(retain_graph=True)
self.aopt.step()
# 训练critic
a_ = self.actor_target(bs_)
q_ = self.critic_target(bs_, a_)
q_target = br + self.gamma * q_
q_eval = self.critic(bs, ba)
td_error = self.mse_loss(q_target,q_eval)
self.copt.zero_grad()
td_error.backward()
self.copt.step()
# 存储序列数据
def store_transition(self, s, a, r, s_):
transition = np.hstack((s,a,[r],s_))
index = self.pointer % self.memory_capacticy
self.memory[index, :] = transition
self.pointer += 1
一些trick
soft-replacement
在实现过程中,我们的target网络也是要更新参数,实际上target参数的更新是来源于估计网络(也就是原Actor、Critic网络)。对于参数更新有两种方法:
- hard replacement 每隔一定的步数才更新全部参数,也就是将估计网络的参数全部替换至目标网络
- soft replacement 每一步就更新,但是只更新一部分参数。
add noise to action
在action的选择策略上增加explore。
实际上就是通过增加一些随机噪声,来增加一些动作空间的探索。实现上就是调整方差。
最后,完整代码已放置于github。