python使用tkinter编写一个数据显示窗口(实时显示更新的数据)
以下代码分为python3版本与python2版本,
python3版本主要靠
self.main_window.after( 刷新的时间毫秒, 需要刷新的函数这里为窗口的清除与插入函数) 刷新函数进行 ,
python2版本则通过编写一个线程进行刷新作用,刷新函数在python2 环境下会报错…
至于我为什么知道python2会出现这个问题,那就是ros没python3的版本…
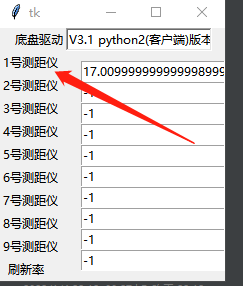
示意图
(数据就会在后面的框里面通过程序运行时的值的改变而改变):

python3版本
不解释了直接可以运行,运行效果为不断的刷新一号测距仪的值
#!/usr/bin/env python2.7
# coding:utf-8
# -*- coding: utf-8 -*-
"""通过开启tcp客户端进行接收,更新下位机的服务端更新的数据"""
import tkinter
class Status():
"""解析的依据在于,status键对应的标识符,具体的参考word手册"""
def __init__(self):
self.json_data = {} #
self.odom()
def odom(self):
"用于储存小车底盘的,里程计,瞬时速度等信息"
self.x = -0.99
self.y = -0.99
self.p = -0.99
self.vx = -0.99
self.vy = -0.99
self.vp = -0.99
self.s_x = -0.99
self.s_y = -0.99
self.s_p = -0.99
# def save_judge_status(self,json_data):
# """对服务器传来的,单条json数据进行解析,判断是否符合,协议,并根据协议,取出对应 dict的有效值"""
# """若通过判断,则表示为无效量"""
# status_name = json_data["status"]
# if status_name in ["Odom_m"]:
# #此时说明,传输正确 对应cs1
s_data = Status()
class MYIP():
def __init__(self):
print("开启显示窗口模块-----------------------")
self.refresh_rate = 300
# main frame
self.main_window = tkinter.Tk()
# top frame
self.top_frame = tkinter.Frame(self.main_window)
# bottom frame
self.bottom_frame = tkinter.Frame(self.main_window)
self.L1 = tkinter.Label(self.top_frame, text='底盘驱动')
self.L1.pack(side='left')
default_value = tkinter.StringVar()
default_value.set('V3.1 python3(客户端)版本')
self.E1 = tkinter.Entry(self.top_frame, textvariable=default_value, bd=2)
self.E1.pack(side=tkinter.LEFT)
self.bottom_left = tkinter.Frame(self.bottom_frame)
self.bottom_right = tkinter.Frame(self.bottom_frame)
self.label1 = tkinter.Label(self.bottom_left, text="%-10s" % "1号测距仪")
self.label2 = tkinter.Label(self.bottom_left, text="%-10s" % '2号测距仪')
self.label3 = tkinter.Label(self.bottom_left, text="%-10s" % '3号测距仪')
self.label4 = tkinter.Label(self.bottom_left, text="%-10s" % '4号测距仪')
self.label5 = tkinter.Label(self.bottom_left, text="%-10s" % '5号测距仪')
self.label6 = tkinter.Label(self.bottom_left, text="%-10s" % '6号测距仪')
self.label7 = tkinter.Label(self.bottom_left, text="%-10s" % '7号测距仪')
self.label8 = tkinter.Label(self.bottom_left, text="%-10s" % '8号测距仪')
self.label9 = tkinter.Label(self.bottom_left, text="%-10s" % '9号测距仪')
self.label10 = tkinter.Label(self.bottom_left, text="%-10s" % '刷新率')
self.label1.pack(side='top')
self.label2.pack(side='top')
self.label3.pack(side='top')
self.label4.pack(side='top')
self.label5.pack(side='top')
self.label6.pack(side='top')
self.label7.pack(side='top')
self.label8.pack(side='top')
self.label9.pack(side='top')
self.label10.pack(side='top')
self.En1 = tkinter.Entry(self.bottom_right)
self.En2 = tkinter.Entry(self.bottom_right)
self.En3 = tkinter.Entry(self.bottom_right)
self.En4 = tkinter.Entry(self.bottom_right)
self.En5 = tkinter.Entry(self.bottom_right)
self.En6 = tkinter.Entry(self.bottom_right)
self.En7 = tkinter.Entry(self.bottom_right)
self.En8 = tkinter.Entry(self.bottom_right)
self.En9 = tkinter.Entry(self.bottom_right)
self.En10 = tkinter.Entry(self.bottom_right)
ret = ("label1", "label2", "label3", "label4", "label5", "label6")
self.En1.delete(0, tkinter.END)
self.En2.delete(0, tkinter.END)
self.En3.delete(0, tkinter.END)
self.En4.delete(0, tkinter.END)
self.En5.delete(0, tkinter.END)
self.En6.delete(0, tkinter.END)
self.En1.insert(0, ret[0])
self.En2.insert(0, ret[1])
self.En3.insert(0, ret[2])
self.En4.insert(0, ret[3])
self.En5.insert(0, ret[4])
self.En6.insert(0, ret[5])
self.En1.pack(side='top')
self.En2.pack(side='top')
self.En3.pack(side='top')
self.En4.pack(side='top')
self.En5.pack(side='top')
self.En6.pack(side='top')
self.En7.pack(side='top')
self.En8.pack(side='top')
self.En9.pack(side='top')
self.En10.pack(side='top')
self.bottom_left.pack(side='left')
self.bottom_right.pack(side='right')
self.top_frame.pack()
self.bottom_frame.pack()
self.c_1 = -1
self.c_2 = -1
self.c_3 = -1
self.c_4 = -1
self.c_5 = -1
self.c_6 = -1
self.c_7 = -1
self.c_8 = -1
self.c_9 = -1
self.ref_num = -1
self.main_window.after(100, self.updata_node)
self.main_window.mainloop()
def updata_node(self):
print("刷新一次")
self.updata_xyp()
# 接下来刷新页面
self.En1.delete(0, 10)
self.En1.insert(0, str(self.c_1)) # delete
self.En1.update()
self.En2.delete(0, 10)
self.En2.insert(0, str(self.c_2)) # delete
self.En2.update()
self.En3.delete(0, 10)
self.En3.insert(0, str(self.c_3)) # delete
self.En3.update()
self.En4.delete(0, 10)
self.En4.insert(0, str(self.c_4)) # delete
self.En4.update()
self.En5.delete(0, 10)
self.En5.insert(0, str(self.c_5)) # delete
self.En5.update()
self.En6.delete(0, 10)
self.En6.insert(0, str(self.c_6)) # delete
self.En6.update()
self.En7.delete(0, 10)
self.En7.insert(0, str(self.c_7)) # delete
self.En7.update()
self.En8.delete(0, 10)
self.En8.insert(0, str(self.c_8)) # delete
self.En9.update()
self.En9.delete(0, 10)
self.En9.insert(0, str(self.c_9)) # delete
self.En9.update()
self.En10.delete(0, 10)
self.En10.insert(0, str(self.ref_num)) # delete
self.En10.update()
self.main_window.after(self.refresh_rate, self.updata_node)
def updata_xyp(self):
"""通过客户端连接到下位机服务端收到的数据更新"""
print("4564 : " + str(s_data.x))
s_data.x = s_data.x + 1
self.c_1 = s_data.x
# self.y = s_data.y
# self.w = s_data.p
if __name__ == '__main__':
# c = Client_link()
# c.start_client()
# print("开启tcp客户端线程拉起完成")
m_win = MYIP()
python2版本
以下为代码,我这里在下面提供两个代码示例:
1.(第一部分)修改为可以直接运行显示,但注释掉了刷新数据的线程部分的,无法对数据进行更新。
"""注意这个 窗口拉起接口在 一 二 部分中被调用的不同的写法"""
self.main_window.mainloop()
2.(第二部分)没有注释掉线程部分,需要通过 from import 的方法在另外一个py文件的线程中进行调用更新,下面是我截取的部分在另一个py文件中的调用,示例
from hint_window import m_win
def t_correct(self):
t_correct = threading.Thread(target=self.calculate_instant_speed)
t_correct.setDaemon(True)
t_correct.start()
def calculate_instant_speed(self):
"""用于更新瞬时速度"""
"""
self.x_speed ,self.y_speed, self.p_speed
"""
m_win.updata_node("vx", self.x_speed)
m_win.updata_node("vy", self.y_speed)
m_win.updata_node("vw", self.p_speed)
(第一部分):
#!/usr/bin/env python2.7
#coding:utf-8
# -*- coding: utf-8 -*-
import tkinter
# import ctypes
import time
import threading
class MYIP(threading.Thread):
def __init__(self):
# 隐藏窗口
# whnd = ctypes.windll.kernel32.GetConsoleWindow()
# if whnd != 0:
# ctypes.windll.user32.ShowWindow(whnd, 0)
# ctypes.windll.kernel32.CloseHandle(whnd)
# main frame
self.main_window = tkinter.Tk()
# top frame
self.top_frame = tkinter.Frame(self.main_window)
# bottom frame
self.bottom_frame = tkinter.Frame(self.main_window)
self.L1 = tkinter.Label(self.top_frame, text='底盘驱动')
self.L1.pack(side='left')
default_value = tkinter.StringVar()
default_value.set('V2.1 python2版本')
self.E1 = tkinter.Entry(self.top_frame, textvariable=default_value, bd=2)
self.E1.pack(side=tkinter.LEFT)
self.bottom_left = tkinter.Frame(self.bottom_frame)
self.bottom_right = tkinter.Frame(self.bottom_frame)
self.label1 = tkinter.Label(self.bottom_left, text="%-10s" % "X(mm)")
self.label2 = tkinter.Label(self.bottom_left, text="%-10s" % 'Y(mm)')
self.label3 = tkinter.Label(self.bottom_left, text="%-10s" % 'W(度)')
self.label4 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vx(m/s)')
self.label5 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vy(m/s)')
self.label6 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vw(rad/s)')
self.label7 = tkinter.Label(self.bottom_left, text="%-10s" % 'C_x')
self.label8 = tkinter.Label(self.bottom_left, text="%-10s" % 'C_y')
self.label9 = tkinter.Label(self.bottom_left, text="%-10s" % 'C_w')
self.label1.pack(side='top')
self.label2.pack(side='top')
self.label3.pack(side='top')
self.label4.pack(side='top')
self.label5.pack(side='top')
self.label6.pack(side='top')
self.label7.pack(side='top')
self.label8.pack(side='top')
self.label9.pack(side='top')
self.En1 = tkinter.Entry(self.bottom_right)
self.En2 = tkinter.Entry(self.bottom_right)
self.En3 = tkinter.Entry(self.bottom_right)
self.En4 = tkinter.Entry(self.bottom_right)
self.En5 = tkinter.Entry(self.bottom_right)
self.En6 = tkinter.Entry(self.bottom_right)
self.En7 = tkinter.Entry(self.bottom_right)
self.En8 = tkinter.Entry(self.bottom_right)
self.En9 = tkinter.Entry(self.bottom_right)
ret = ("label1", "label2", "label3", "label4", "label5", "label6")
self.En1.delete(0, tkinter.END)
self.En2.delete(0, tkinter.END)
self.En3.delete(0, tkinter.END)
self.En4.delete(0, tkinter.END)
self.En5.delete(0, tkinter.END)
self.En6.delete(0, tkinter.END)
self.En1.insert(0, ret[0])
self.En2.insert(0, ret[1])
self.En3.insert(0, ret[2])
self.En4.insert(0, ret[3])
self.En5.insert(0, ret[4])
self.En6.insert(0, ret[5])
self.En1.pack(side='top')
self.En2.pack(side='top')
self.En3.pack(side='top')
self.En4.pack(side='top')
self.En5.pack(side='top')
self.En6.pack(side='top')
self.En7.pack(side='top')
self.En8.pack(side='top')
self.En9.pack(side='top')
self.bottom_left.pack(side='left')
self.bottom_right.pack(side='right')
self.top_frame.pack()
self.bottom_frame.pack()
print("准备开启窗口数据更新线程")
self.main_window.mainloop()
# t_updata = threading.Thread(target=self.updata_datas)
# t_updata.start()
def updata_datas(self):
while True:
# self.label1 = tkinter.Label(self.bottom_left, text="%-10s" % "X(mm)")
# self.label2 = tkinter.Label(self.bottom_left, text="%-10s" % 'Y(mm)')
# self.label3 = tkinter.Label(self.bottom_left, text="%-10s" % 'W(度)')
# self.label4 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vx(m/s)')
# self.label5 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vy(m/s)')
# self.label6 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vw(rad/s)')
print (110)
time.sleep(0.2)
self.main_window.mainloop()
def updata_node(self,name,val):
if name == "x":
self.En1.delete(0, 10)
self.En1.insert(0, str(val)) # delete
elif name == "y":
self.En2.delete(0, 10)
self.En2.insert(0, str(val)) # delete
elif name == "w":
self.En3.delete(0, 10)
self.En3.insert(0, str(val)) # delete
elif name == "vx":
self.En4.delete(0, 10)
self.En4.insert(0, str(val)) # delete
elif name == "vy":
self.En5.delete(0, 10)
self.En5.insert(0, str(val)) # delete
elif name == "vw":
self.En6.delete(0, 10)
self.En6.insert(0, str(val)) # delete
elif name == "cx":
self.En7.delete(0, 10)
self.En7.insert(0, str(val)) # delete
elif name == "cy":
self.En8.delete(0, 10)
self.En8.insert(0, str(val)) # delete
elif name == "cw":
self.En9.delete(0, 10)
self.En9.insert(0, str(val)) # delete
def process_data(self):
if self.jsondata['data']['country']:
country = self.jsondata['data']['country']
else:
country = "NULL"
if self.jsondata['data']['area']:
area = self.jsondata['data']['area']
else:
area = "NULL"
if self.jsondata['data']['region']:
region = self.jsondata['data']['region']
else:
region = "NULL"
if self.jsondata['data']['city']:
city = self.jsondata['data']['city']
else:
city = "NULL"
if self.jsondata['data']['county']:
county = self.jsondata['data']['county']
else:
county = "NULL"
if self.jsondata['data']['isp']:
isp = self.jsondata['data']['isp']
else:
isp = "NULL"
return (country, area, region, city, county, isp)
m_win = MYIP()
# if __name__ == '__main__':
#
# m_win = MYIP()
(第二部分):
#!/usr/bin/env python2.7
# coding:utf-8
# -*- coding: utf-8 -*-
import tkinter
# import ctypes
import time
import threading
class MYIP(threading.Thread):
def __init__(self):
# 隐藏窗口
# whnd = ctypes.windll.kernel32.GetConsoleWindow()
# if whnd != 0:
# ctypes.windll.user32.ShowWindow(whnd, 0)
# ctypes.windll.kernel32.CloseHandle(whnd)
# main frame
self.main_window = tkinter.Tk()
# top frame
self.top_frame = tkinter.Frame(self.main_window)
# bottom frame
self.bottom_frame = tkinter.Frame(self.main_window)
self.L1 = tkinter.Label(self.top_frame, text='底盘驱动')
self.L1.pack(side='left')
default_value = tkinter.StringVar()
default_value.set('V2.1 python2版本')
self.E1 = tkinter.Entry(self.top_frame, textvariable=default_value, bd=2)
self.E1.pack(side=tkinter.LEFT)
self.bottom_left = tkinter.Frame(self.bottom_frame)
self.bottom_right = tkinter.Frame(self.bottom_frame)
self.label1 = tkinter.Label(self.bottom_left, text="%-10s" % "X(mm)")
self.label2 = tkinter.Label(self.bottom_left, text="%-10s" % 'Y(mm)')
self.label3 = tkinter.Label(self.bottom_left, text="%-10s" % 'W(度)')
self.label4 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vx(m/s)')
self.label5 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vy(m/s)')
self.label6 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vw(rad/s)')
self.label7 = tkinter.Label(self.bottom_left, text="%-10s" % 'C_x')
self.label8 = tkinter.Label(self.bottom_left, text="%-10s" % 'C_y')
self.label9 = tkinter.Label(self.bottom_left, text="%-10s" % 'C_w')
self.label1.pack(side='top')
self.label2.pack(side='top')
self.label3.pack(side='top')
self.label4.pack(side='top')
self.label5.pack(side='top')
self.label6.pack(side='top')
self.label7.pack(side='top')
self.label8.pack(side='top')
self.label9.pack(side='top')
self.En1 = tkinter.Entry(self.bottom_right)
self.En2 = tkinter.Entry(self.bottom_right)
self.En3 = tkinter.Entry(self.bottom_right)
self.En4 = tkinter.Entry(self.bottom_right)
self.En5 = tkinter.Entry(self.bottom_right)
self.En6 = tkinter.Entry(self.bottom_right)
self.En7 = tkinter.Entry(self.bottom_right)
self.En8 = tkinter.Entry(self.bottom_right)
self.En9 = tkinter.Entry(self.bottom_right)
ret = ("label1", "label2", "label3", "label4", "label5", "label6")
self.En1.delete(0, tkinter.END)
self.En2.delete(0, tkinter.END)
self.En3.delete(0, tkinter.END)
self.En4.delete(0, tkinter.END)
self.En5.delete(0, tkinter.END)
self.En6.delete(0, tkinter.END)
self.En1.insert(0, ret[0])
self.En2.insert(0, ret[1])
self.En3.insert(0, ret[2])
self.En4.insert(0, ret[3])
self.En5.insert(0, ret[4])
self.En6.insert(0, ret[5])
self.En1.pack(side='top')
self.En2.pack(side='top')
self.En3.pack(side='top')
self.En4.pack(side='top')
self.En5.pack(side='top')
self.En6.pack(side='top')
self.En7.pack(side='top')
self.En8.pack(side='top')
self.En9.pack(side='top')
self.bottom_left.pack(side='left')
self.bottom_right.pack(side='right')
self.top_frame.pack()
self.bottom_frame.pack()
print("准备开启窗口数据更新线程")
# self.main_window.mainloop()
t_updata = threading.Thread(target=self.updata_datas)
t_updata.start()
def updata_datas(self):
while True:
# self.label1 = tkinter.Label(self.bottom_left, text="%-10s" % "X(mm)")
# self.label2 = tkinter.Label(self.bottom_left, text="%-10s" % 'Y(mm)')
# self.label3 = tkinter.Label(self.bottom_left, text="%-10s" % 'W(度)')
# self.label4 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vx(m/s)')
# self.label5 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vy(m/s)')
# self.label6 = tkinter.Label(self.bottom_left, text="%-10s" % 'Vw(rad/s)')
print(110)
time.sleep(0.2)
self.main_window.mainloop()
def updata_node(self, name, val):
if name == "x":
self.En1.delete(0, 10)
self.En1.insert(0, str(val)) # delete
elif name == "y":
self.En2.delete(0, 10)
self.En2.insert(0, str(val)) # delete
elif name == "w":
self.En3.delete(0, 10)
self.En3.insert(0, str(val)) # delete
elif name == "vx":
self.En4.delete(0, 10)
self.En4.insert(0, str(val)) # delete
elif name == "vy":
self.En5.delete(0, 10)
self.En5.insert(0, str(val)) # delete
elif name == "vw":
self.En6.delete(0, 10)
self.En6.insert(0, str(val)) # delete
elif name == "cx":
self.En7.delete(0, 10)
self.En7.insert(0, str(val)) # delete
elif name == "cy":
self.En8.delete(0, 10)
self.En8.insert(0, str(val)) # delete
elif name == "cw":
self.En9.delete(0, 10)
self.En9.insert(0, str(val)) # delete
def process_data(self):
if self.jsondata['data']['country']:
country = self.jsondata['data']['country']
else:
country = "NULL"
if self.jsondata['data']['area']:
area = self.jsondata['data']['area']
else:
area = "NULL"
if self.jsondata['data']['region']:
region = self.jsondata['data']['region']
else:
region = "NULL"
if self.jsondata['data']['city']:
city = self.jsondata['data']['city']
else:
city = "NULL"
if self.jsondata['data']['county']:
county = self.jsondata['data']['county']
else:
county = "NULL"
if self.jsondata['data']['isp']:
isp = self.jsondata['data']['isp']
else:
isp = "NULL"
return (country, area, region, city, county, isp)
m_win = MYIP()
# if __name__ == '__main__':
#
# m_win = MYIP()