树莓派基础之树莓派芯片导读和IO口驱动编程
树莓派芯片导读和IO口驱动编程篇
- 一:地址
- 二:驱动两大利器:电路图和芯片手册
- 三:I/O操控代码编程
一:地址
1.总线地址:
AB(全称:Address Bus,中文名:地址总线)属于一种电脑总线,是由CPU或有DMA能力的单元,用来沟通这些单元想要存取电脑内存元件/地方的实体位址。
通俗的说就是CPU能够访问内存的范围。
比如现象:装了32位win7操作系统,明明内存条8G,可是系统只识别了3.8G,当装了64位的win7操作系统才能识别到8G
32位能表示/访问4.294.967.296bit
bit=4.294.967.296
kbit=4.194.304
mbit=4.096
gbit=4
树莓派也是跑32位的操作系统,所以最高只能支持到4G的内存。
查看树莓派的内存条有多大:
cat /proc/meminfo

2.物理地址:
硬件的实际地址或绝对地址。
3.虚拟地址:
逻辑(基于算法的地址(软件层面的地址,它是个假地址)),称为虚拟地址。
基于树莓派芯片手册来理解物理地址和虚拟地址:
假如树莓派的真正内存只有1G,但是有些程序内存占用空间超过了一个G,这个时候怎么办呢?
虚拟地址可以把物理地址1G映射成4G,让程序在虚拟地址上跑
查看树莓派CPU型号:
cat /proc/cpuinfo

BCM2835 是树莓派3b cpu的型号,它是ARM-cotexA53架构
二:驱动两大利器:电路图和芯片手册
电路图:通过电路图找到寄存器
芯片手册:进行编写
BCM2835芯片手册
这个手册不用去细看,做到哪个板块的开发就看哪个板块的,比如串口板块开发看串口。。。
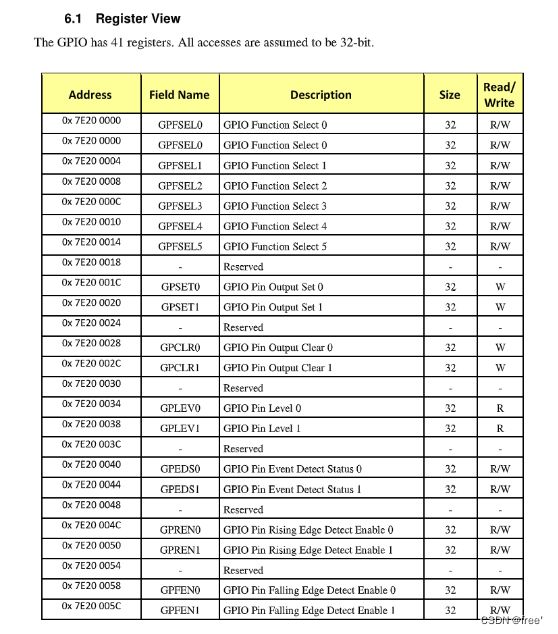
1.芯片手册第六章:树莓派寄存器的介绍
这些寄存器都是管理GPIO的
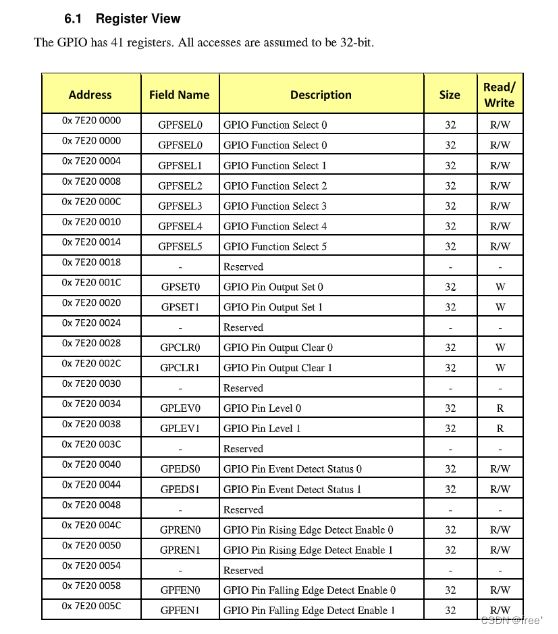
address:总线地址
description:功能介绍
Field Name:寄存器名字
GPFSEL0 GPIO Function Select 0 //功能选择 输入/输出
GPSET0 GPIO Pin Output Set 0 //输出0
GPSET1 GPIO Pin Output Set 0 //输出1
0 = No effect
1 = Set GPIO pin n
GPCLR0 GPIO Pin Output Clear 0 //清0
0 = No effect
1 = Clear GPIO pin n
GPCLR1 GPIO Pin Output Clear 1 //清1
2.每个寄存器都是32位的,每3个位为一组配置某个I/O口
寄存器第0组位FESL0–9
寄存器第1组位FSEL10–19

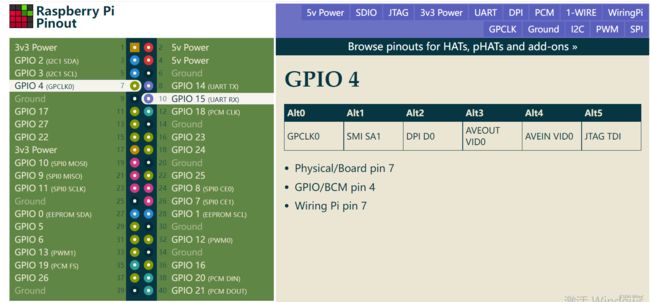
例如:我们把引脚4配置为输出引脚
FSEL4 14-12 001 我们把4引脚的14-12配置成001 GPIO Pin 4 is an output
注意:我们配置的底层引脚对应得是BCM

具体的引脚也可通过官方手册查找:
树莓派引脚
3.寄存器的地址问题:
我们在编写驱动程序的时候,IO空间的起始地址是0x3f000000,加上GPIO的偏移量0x2000000,所以GPIO的物理地址应该是0x3f200000开始的,然后在这个基础上进行Linux系统的MMU内存虚拟化管理,映射到虚拟地址上。
该图的尾部偏移是对的根据GPIO的物理地址0x3f200000可以知道:
GPFSEL0 0x3f200000
GPSET0 0x3f20001c
GPCLR0 0x3f200028
这里我们得到的是物理地址是不可操作的,我们需要转化成虚拟地址,通过函数:
void __iomem * __ioremap(unsigned long phys_addr, size_t size, unsigned long flags);
ioremap宏定义在asm/io.h内:
#define ioremap(cookie,size) __ioremap(cookie,size,0)
参数:
phys_addr:要映射的起始的IO地址
size:要映射的空间的大小
flags:要映射的IO空间和权限有关的标志
该函数返回映射后的内核虚拟地址(3G-4G). 接着便可以通过读写该返回的内核虚拟地址去访问之这段I/O内存资源。
三:I/O操控代码编程
1.
#include 注意:
volatile : 指令不会因为编译器的优化而省略,且要求每次直接读值。
按位与:0&0 = 0,0&1 = 0,1&0 = 0,1&1 = 1
按位或:0|0 = 0,1|0 = 1,0|1 = 1,1|1 =1
2.应用层代码:
#include 3.驱动代码进行模块化编译:
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make -j2 modules
驱动代码的加载有两种:
第一种是直接写到内核,需要重新启动内核才能实现
第二种是把驱动代码编译成模块.ko文件,然后加载到现有的内核中就可以实现
显然第二种更加方便
4.把编译好的驱动模块文件和交叉编译的测试文件远程拷贝到树莓派:
![]()

5.把驱动模块文件加载进树莓派内核:
sudo insmod pin4driver2.ko

dmesg
查看内核打印状态,转载成功:
![]()
6:运行测试代码之前,想要给驱动代码文件加一个权限:
sudo chmod 666 /dev/pin4
上层运运行测试代码:

底层看到内核打印的信息:
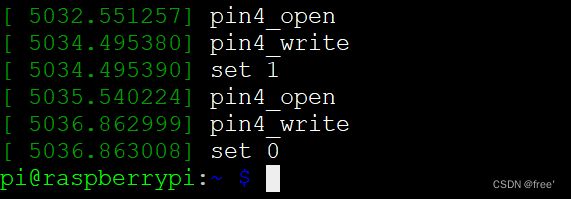
然后再看到树莓派的pin4引脚信息:

这样我们就实现了一个简单的驱动了。