最优化方法——QR Factorization
最优化方法——QR Factorization
- 前言
- 一、QR分解
- 二、QR分解方法
-
- 1.GS QR
- 2.修正的GS QR
- 3.Householder
- 三、性能比较
- 总结
前言
Matrix Inverse
Orthogonal Matrices
前面的两篇blog主要是回顾一下线代知识,打一打基础
这三周学习的QR分解真的又双叕打开了我学习线性代数的格局,总觉得自己的数学真的是太过浅薄,总为那些优美的算法感到惊艳。于是打算整理三篇来好好地捋捋QR分解的理论和实验。(老话重提:不是为了完成DDL而作的blog)
【注】以下内容全部非官方,纯属记录个人角度的理解,如有失偏颇,还望dalao批评指正!
一、QR分解
其实就是以计算机判断一个矩阵是否可逆,并求解逆为目的的一种方法。
QR将一个矩阵A分解成具有标准正交列向量的矩阵Q和上三角矩阵R(对角线元素不为0)的算法。这个分解能够有效的提高计算机求解线性方程、最小二乘问题、带约束的最小二乘问题的效率,有效降低计算复杂度。
二、QR分解方法
1.GS QR
Gram-Schmidt QR算法将逐列计算Q和R,通过第k部步的结果推导到第k+1步,类似数学归纳法:
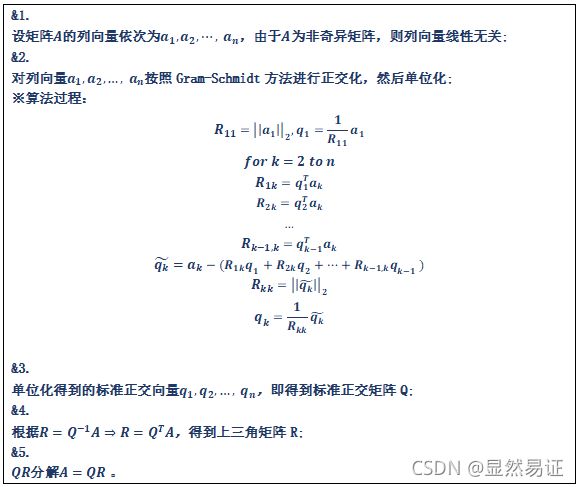
刚开始接触可能会有点儿晕,但是有线代的基础知识的铺垫下,有一些个人理解:
A = Q R A=QR A=QR反映的是矩阵A列向量的张成空间与具有标准正交列向量Q的张成空间之间的关系,而且通过QR分解能更直观的得到结论:列向量 1 , … , _1,…,_ q1,…,qk和 1 , … , _1,…,_ a1,…,ak张成的空间相同.
在一组标准正交基下,向量a在某一方向下的投影分量为 q 1 T a q q_1^Taq q1Taq
其实就是利用上面这个结论不断地去掉向量a在已知方向下的投影分量,得到在新的标准正交基下的剩余分量,迭代到终止条件即可。
2.修正的GS QR
GS算法真的给我第一印象十分完美,并为算法的创造者钦佩之至。但是计算机总是个不完美的发明,体现不了数学理论的和谐,由于计算机浮点数存储的舍入误差,会使GS QR在实践的过程中Q矩阵失去正交性,从某个 k k k开始, q k q_k qk与前面的列之间产生了正交性偏差。
修正的GS QR其实也就比GS QR多一句话:对剩余向量进行修正
我实验过程中用GS QR,得到的是如下Q矩阵正交性偏差图:

用修正的GS QR,得到的是如下Q矩阵正交性偏差图:

上图可以反映修改GS QR有更好的数值计算性能,能有效减少计算机浮点数存储的误差。
【关键代码】
% 修正前
for k=1:n_a
R_a(1:k-1,k)=Q_a(:,1:k-1)'*MatrixA(:,k);
v=MatrixA(:,k)-Q_a(:,1:k-1)*R_a(1:k-1,k);
R_a(k,k)=norm(v);
Q_a(:,k)=v/R_a(k,k);
end
% 修正后
Q_a(:,1)=MatrixA(:,1)/norm(MatrixA(:,1));
for k=2:n_a
for i=k:n_a
MatrixA(:,i)=MatrixA(:,i)-MatrixA(:,i)'*Q_a(:,k-1)*Q_a(:,k-1);
end
R_a(k,k)=norm(MatrixA(:,k));
Q_a(:,k)=MatrixA(:,k)/R_a(k,k);
end
3.Householder
其实上课听这个感觉还挺清楚的,但是课后做实验感觉有点儿顶…
Householder算法是QR分解常用的算法(MATLAB和Julia中的qr函数),与Gram-Schmidt相比,对舍入误差更有鲁棒性。
A = [ Q Q ~ ] [ R 0 ] A=\begin{bmatrix} Q & \widetilde{Q} \end{bmatrix}\begin{bmatrix} R \\ 0 \end{bmatrix} A=[QQ ][R0]
完整的Q因子被构造成正交矩阵的乘积:
[ Q Q ~ ] = H 1 H 2 . . . H n [Q \widetilde{Q}]=H_1H_2...H_n [QQ ]=H1H2...Hn
每个 H i ∈ R m × m H_i\in R^{m×m} Hi∈Rm×m是对称的正交的“反射算子”
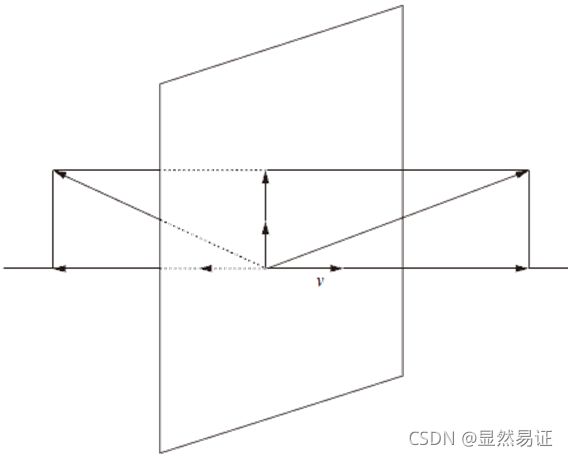
对反射算子的理解,是两个向量关于它们之间垂直平分面的映射,类似“镜面对称”。
它的数学表达式是: H = I − 2 v v T H=I-2vv^T H=I−2vvT

三角化过程如下:
- R的第一列
计算将 A A A的第一列映射到 1 _1 e1乘积的反射器
用 − 2 1 1 −2_1 _1^ I−2v1v1T和 A A A的乘积代替 A A A - R的第二列
计算将 2 : 4 , 2 _{2:4,2} A2:4,2映射到 1 _1 e1乘积的反射器
用 − 2 2 2 −2_2 _2^ I−2v2v2T和 2 : 4 , 2 : 3 _{2:4,2:3} A2:4,2:3的乘积代替 2 : 4 , 2 : 3 _{2:4,2:3} A2:4,2:3 - R的第三列
计算将 3 : 4 , 3 _{3:4,3} A3:4,3映射到 1 _1 e1乘积的反射器
用 − 2 3 3 −2_3 _3^ I−2v3v3T和 3 : 4 , 3 _{3:4,3} A3:4,3的乘积代替 3 : 4 , 3 _{3:4,3} A3:4,3 - balabala…其他类似…
【补充】
基于Householder变换也可以证明QR分解的存在性(Q是正交矩阵,R是上三角矩阵)

【关键代码】
for k=1:n_a
y = MatrixA(k:m_a,k);
y1 = y(1,1);
e1=zeros(m_a-k+1,1);
e1(1)=1;
w = y+sign(y1)*norm(y)*e1;
v=w/norm(w); % 计算反射算子
MatrixA(k:m_a,k:n_a)=MatrixA(k:m_a,k:n_a)-2*v*(v'*MatrixA(k:m_a,k:n_a));
end
R_a=MatrixA(1:m_a,1:n_a);
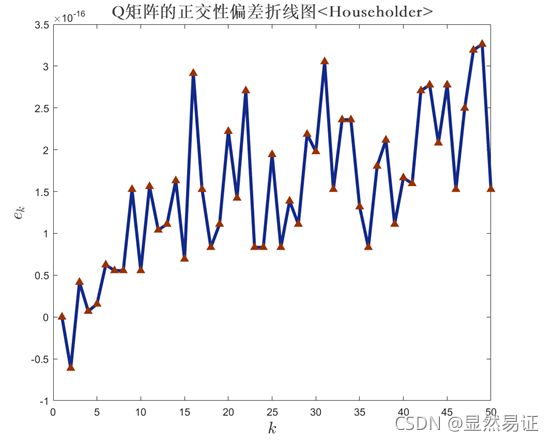
Householder变换确实使矩阵Q的正交性偏差减小,在matlab中还可以调用qr函数,求解Householder QR分解的速度非常快。
% qr函数实现
[Q_a,R_a]=qr(MatrixA);
三、性能比较
| 算法 | 性能 |
|---|---|
| Gram-Schmidt算法 | 复杂度为 2 m n 2 2mn^2 2mn2 flops;在实际情况中不推荐使用(容易被舍入误差影响) |
| 修正Gram–Schmidt算法 | 复杂度为 2 m n 2 2mn^2 2mn2 flops;有更好的数值计算性能 |
| Householder算法 | 复杂度为 2 m n 2 − ( 2 / 3 ) n 3 2mn^2-(2/3)n^3 2mn2−(2/3)n3 flops;将 Q Q Q表示为初等正交矩阵的乘积;最广泛使用的算法(在MATLAB和Julia中的qr函数使用该算法) |
总结
现在看来好像也不是很晕人了,果然DDL才是干扰理解的罪魁祸首。理解之后,其实两种QR分解的算法无非就是基于三个关键词:”投影“、”映射“和”迭代“。非常有意思的是,两者的出发点不同,一个是利用投影公式不断去掉投影分量(GS)另一个是利用构造反射算子实现对角化,都能实现QR分解,而且数学表达还极其简约√
最后就是总结一下在计算机中怎么求一个矩阵的逆…
这个最优化方法第一节课抛出来的问题…真的好家伙,就衔接上了【哈哈】
当时傻乎乎的觉得应该跟线代里面没啥区别【捂脸】
回归正题:
- 如何求逆?当然首先是要判断矩阵有没有逆√
在线代里面是要看最大线性无关组(矩阵是否满秩)或者看矩阵对应的行列式的值是否为0.通过刚刚的QR分解我们可以清楚的知道,奇异矩阵是不能进行QR分解的,判断条件可以设置为R矩阵对角线元素是否为0,若存在为0的对角线元素则奇异;否则非奇异,也就是说我们可以去求它的逆。 - 如何根据QR分解去求逆?
手推如下:

That’s all!Bye~
码字不易,记得点赞+关注+收藏+好评(๑•̀ㅂ•́)و✧