【数学与算法】非线性最小二乘法的解法【最速梯度下降法】、【牛顿法】、【高斯牛顿法】、【LM算法】
关于非线性优化的问题,可以推荐观看视觉SLAM十四讲视频的第六讲 非线性优化。
如果不明白线性和非线性,可参考这篇博客:线性最小二乘和非线性最小二乘
这篇博客的后面有讲到几种优化方法(最速梯度下降法、牛顿法、高斯牛顿法,LM算法),很容易记住,不像其他的公式推导那么生硬:Bundle Adjustment—即最小化重投影误差(高翔slam—第七讲)
这篇博客也很棒非线性优化(高翔slam—第六讲 )
下图摘自非线性优化

非线性最小二乘:
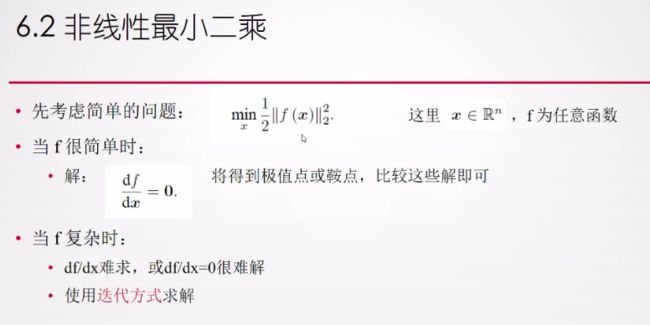

所谓非线性,就是f(x)无法表示为的线性关系,而是某种非线性关系。
这让求解导函数为零的问题变成了一个不断寻找下降增量 ∆xk 的问题。以下就是寻找增量的方法。
下面是对平方展开的:

一阶梯度法(梯度下降法):

不需要求步长(设定固定步长)叫梯度下降法,
每一步迭代都需要求最优步长的叫做最速下降法。
二阶梯度法(又叫牛顿法):

牛顿法与高斯牛顿法的不同之处:
牛顿法是直接对误差的平方 ∣ ∣ f ( x + Δ x ) ∣ ∣ 2 2 \color{blue}||f(x+\Delta{x})||^2_2 ∣∣f(x+Δx)∣∣22 在x处进行泰勒展开。
高斯牛顿法是对误差函数 f ( x + Δ x ) f(x+\Delta{x}) f(x+Δx)在x处进行泰勒展开后得到 f ( x + ∆ x ) = f ( x ) + J ( x ) ∆ x \color{blue}f(x+∆x) = f(x)+ J(x)∆x f(x+∆x)=f(x)+J(x)∆x,再对 f ( x + ∆ x ) = f ( x ) + J ( x ) ∆ x \color{blue}f(x+∆x) = f(x)+ J(x)∆x f(x+∆x)=f(x)+J(x)∆x进行平方操作。
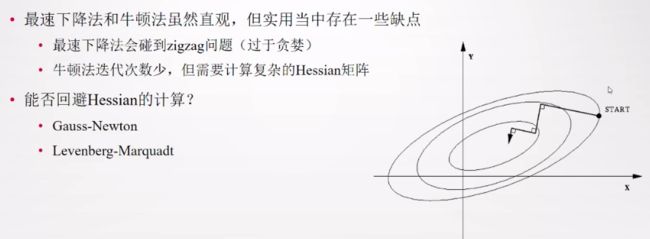
评价一阶梯度与二阶梯度:
一阶梯度法(梯度下降法),太慢了,因为它每次都会找到最陡的方向进行下降。如果是最速下降法(比梯度下降法每一步迭代多了求最优步长),前后两次迭代的梯度向量方向是正交的,也就是说一直走的是直角,故就算很简单的也会走很多步,即过于贪婪(zigzag 问题),过于贪心,容易走出锯齿路线,反而增加了迭代次数;

而二阶梯度法(牛顿法),迭代次数少,对高阶表现良好,但不可避免的我们需要计算目标函数的 H 矩阵,这在问题规模较大时非常困难,我们通常倾向于避免 H 的计算。
高斯牛顿法:

令 H = J ( x ) J ( x ) T , g = − J ( x ) f ( x ) \color{blue}H=J(x)J(x)^T,g=-J(x)f(x) H=J(x)J(x)T,g=−J(x)f(x),则高斯牛顿方程变为:
H ∆ x = g H∆x=g H∆x=g
重中之重,牛顿法和高斯牛顿法的对比:对比牛顿法中 H ∗ ∆ x = − J \color{blue}H*∆x=-J H∗∆x=−J,高斯牛顿法用 J ( x ) J ( x ) T \color{blue}J(x)J(x)^T J(x)J(x)T作为牛顿法中Hessian矩阵的近似,从而省略了 H \color{blue}H H的计算。
求解高斯牛顿方程是整个优化问题的核心所在,如果能解出该方程,则高斯牛顿法的步骤如下:

为了求解增量方程,需要解出 H − 1 \color{blue}H^{-1} H−1,这需要 H \color{blue}H H矩阵可逆。但是实际上 H \color{blue}H H只有半正定,也就是 H \color{blue}H H可能会是奇异矩阵或ill-condition的情况,此时增量的稳定性较差,导致算法不收敛。就算H非奇异也非病态,但是如果求出来的步长 ∆ x \color{blue}∆x ∆x 太大,也无法保证能迭代收敛。
牛顿法与高斯牛顿法的不同之处:
牛顿法是直接对误差的平方 ∣ ∣ f ( x + Δ x ) ∣ ∣ 2 2 \color{blue}||f(x+\Delta{x})||^2_2 ∣∣f(x+Δx)∣∣22 在x处进行泰勒展开。
高斯牛顿法是对误差函数 f ( x + Δ x ) f(x+\Delta{x}) f(x+Δx)在x处进行泰勒展开后得到 f ( x + ∆ x ) = f ( x ) + J ( x ) ∆ x \color{blue}f(x+∆x) = f(x)+ J(x)∆x f(x+∆x)=f(x)+J(x)∆x,再对 f ( x + ∆ x ) = f ( x ) + J ( x ) ∆ x \color{blue}f(x+∆x) = f(x)+ J(x)∆x f(x+∆x)=f(x)+J(x)∆x进行平方操作。

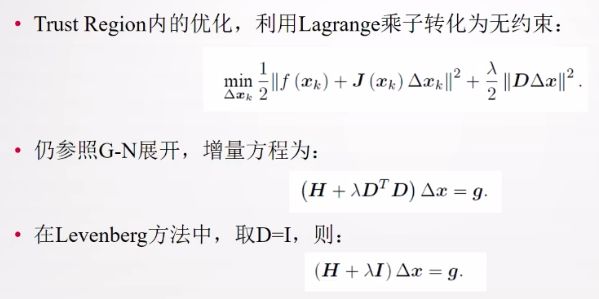
列文伯格-马夸尔特(Levenberg-Marquadt):



例题:使用高斯牛顿法进行曲线拟合

#include