无人机无线传感器网络中的节能数据采集(Matlab代码实现)
目录
1 概述
2 运行结果
3 参考文献
4 Matlab代码
1 概述
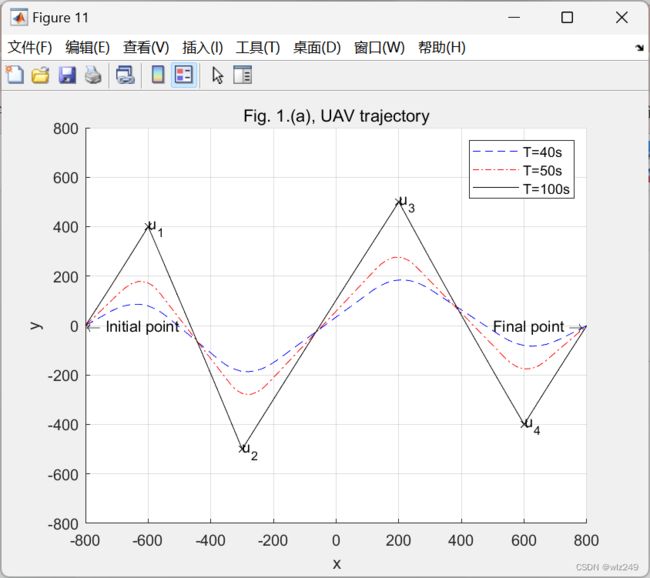
无线传感器网络(WSN)中传感器的传感、处理、存储和通信功能不断增强。数据采集是传感器网络的基础功能之一。但是,传统的数据采集方式存在“能量空洞”问题。为解决该问题,一些学者提出将无人机(UAV)引入到无线传感器网络中。利用无人机的移动性,降低传输能耗,使各个传感器能耗负担更加均匀。然而,基于无人机的无线传感器网络也面临着诸多挑战,研究人员对存在的问题进行了广泛和深入的探索。如何高效地采集无线传感器网络中的数据仍是待解决的问题之一。本文主要对基于无人机的无线传感器网络(UAV-WSN)的数据采集技术展开研究。研究场景主要考虑:无人机的高度、轨道固定,大量传感器节点随机分布在无人机飞行轨道周围,并通过单跳的通信方式将数据传送到无人机。
2 运行结果




3 参考文献
[1]樊玉莹. 基于无人机的无线传感器网络高效数据采集技术研究[D].上海交通大学,2019.DOI:10.27307/d.cnki.gsjtu.2019.002757.
4 Matlab代码
主函数部分代码:
clear all
close all
addpath('./src')
global u q0 qF
istrain = 0
if istrain == 1
%% Optimization
Q = {};
X = {};
Theta = {};
Lo = {};
for T = [40 50 100]
disp(['T =' num2str(T) ', start'])
[q, x, th, lo]= solveP1('T', T,'Sk',10*(10^6),'epsilon',10^-2);
disp(['T =' num2str(T) ', end'])
Q = cat(1, Q, {q});
X = cat(1, X, {x});
Theta = cat(1,Theta,{th});
Lo = cat(1,Lo, {lo});
end
else
load('./data/Fig1.mat')
parameter_setting('Sk',10*(10^6),'epsilon',10^-2);
end
%% figure 1.(a)
figure(11)
hold on
plot(Q{1}(1,:),Q{1}(2,:), '--b',Q{2}(1,:),Q{2}(2,:), '-.r',Q{3}(1,:),Q{3}(2,:), '-k');
scatter(u(1,:),u(2,:), 'xk');
legend('T=40s','T=50s','T=100s');
axis([ -800 800 -800 800])
grid on
title('Fig. 1.(a), UAV trajectory')
xlabel('x')
ylabel('y')
text(q0(1),q0(2),'\leftarrow Initial point');
text(qF(1)-300,qF(2),'Final point \rightarrow');
for k = 1: 4
text(u(1,k),u(2,k),['u_{', num2str(k), '}']);
end
drawnow
%% figure 1.(b)
figure(13)
Xr = X{2};
t = zeros(4,1);
for k = 1: 4
t(k) = graythresh(Xr(:,k));
end
t = min(t) * 1.2;
Xr(Xr >= t) = 1;
Xr(Xr < t) = 0;
plot([0:99]*50/99, Xr(:,1), '-r',[0:99]*50/99, Xr(:,2), '--b', [0:99]*50/99, Xr(:,3), ':k',[0:99]*50/99, Xr(:,4), '-.m');
legend('SN u_{1}','SN u_{2}','SN u_{3}','SN u_{4}','Location','north','NumColumns',4);
axis([ 0 50 0 1.25])
title('Fig.1(b), Wake-up schedule (T=50s)');
yticks([0 1])
yticklabels({'Sleep','Wake-up'})
drawnow