SMOKE: Single-Stage Monocular 3D Object Detection via Keypoint Estimation
纵目发表的这篇单目3D目标检测论文不同于以往用2D预选框建立3D信息,而是采取直接回归3D信息,这种思路简单又高效,并不需要复杂的前后处理,而且是一种one stage方法,对于实际业务部署也很友好。
来源:杰读源码 微信公众号
论文:SMOKE: Single-Stage Monocular 3D Object Detection via Keypoint Estimation

- 论文:https://arxiv.org/pdf/2002.10111.pdf
- 代码:https://github.com/open-mmlab/mmdetection3d
Introduction
2D目标检测目前已经在精度和速度上都取得了不错的成绩,而3D目标检测由于需要同时估计出目标的位置与姿态,因此相比2D是一个更具挑战的方向。
目前性能最好的3D目标检测还是需要依赖激光雷达的点云或者点云+图像融合,考虑到成本因素,仅依靠单目摄像头的3D目标检测还是非常值得研究的。
本作有以下几个贡献点:
- 提出了一个one-stage单目3D检测方法,思路简答,且end-to-end。
- 3D框8个角点的计算使用了多种方式得到,每种方式都参与了loss的计算,使训练更容易收敛。
- 在KITTI数据集上达到了SOTA。
Detection Problem
为了方便下面对细节详细展开描述,这里先将3D目标检测概述下:
给定一张RGB图像 I ∈ R W × H × 3 I\in R^{W\times H\times3} I∈RW×H×3, W W W和 H H H分别代表图像的宽高,需要识别出图像中每个目标的分类 C C C以及 3 D 3D 3D框 B B B的信息, B B B将由下面7个变量代表 ( h , w , l , x , y , z , θ ) (h,w,l,x,y,z,\theta) (h,w,l,x,y,z,θ), ( h , w , l ) (h,w,l) (h,w,l)代表目标的高度、宽度、长度单位为 m m m, ( x , y , z ) (x,y,z) (x,y,z)是目标的中心坐标,单位为 m m m, θ \theta θ代表目标框的航向角 y a w yaw yaw, r o w row row和 p i t c h pitch pitch这两个角度在KITTI数据集中为0,此外,还假定相机的内参 K K K是已知的。
SMOKE Approach
Backbone
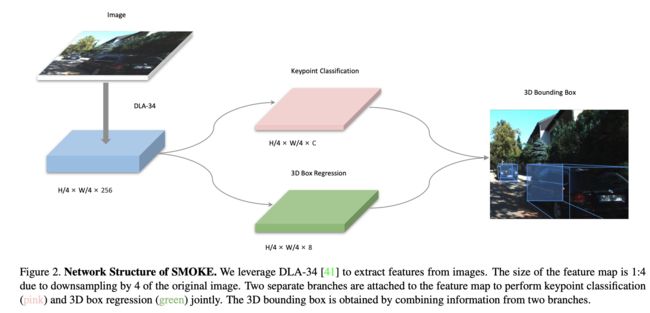
主干网络选择使用DLA-34,其中部分卷积换成了DCN,最后的输出相对于原始图4次下采样的特征图。论文还将BN换成了GN(GroupNorm),因为GN对batch size的大小不那么敏感,且在训练中对噪声更鲁棒。
3D Detection Network
head部分一共两条分支,一条用于检测目标中心点位置同时分类,另一条回归目标的3D信息。
Keypoint Branch
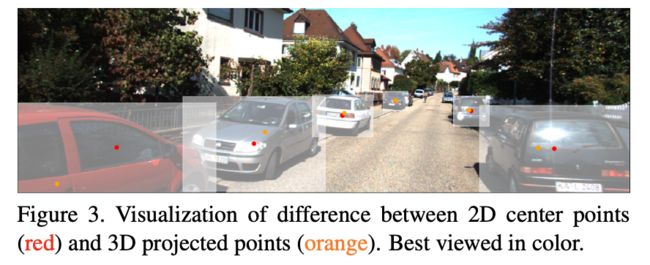
中心点的估计与 C e n t e r N e t CenterNet CenterNet那片论文的思路相似,不同的是 C e n t e r N e t CenterNet CenterNet里用的是2D框的中心点,而这里用的是3D框的中心点在图像上的投影点,如下图所示:
Regression Branch
回归分支在每张热图上预测3D信息,3D信息被编码成 τ = [ δ z , δ x c , δ y c , δ h , δ w , δ l , s i n α , c o s α ] T \tau=[\delta_z,\delta_{x_c},\delta_{y_c},\delta_h,\delta_w,\delta_l,sin\alpha,cos\alpha]^T τ=[δz,δxc,δyc,δh,δw,δl,sinα,cosα]T,其中 δ z \delta_z δz为深度补偿值, δ x \delta_x δx和 δ y \delta_y δy为下采样造成的误差所需的坐标补偿值, δ h \delta_h δh, δ w \delta_w δw, δ l \delta_l δl为尺寸的补偿值, s i n ( α ) sin(\alpha) sin(α)和 c o s ( α ) cos(\alpha) cos(α)为计算航向角所需的值。
深度值 z z z由预先定义的缩放系数和补偿值计算得到:
z = μ + δ z σ z z=\mu+\delta_z\sigma_z z=μ+δzσz
得到了深度值 z z z,加上下采样中的补偿值 [ δ x c , δ y c ] T [\delta_{x_c},\delta_{y_c}]^T [δxc,δyc]T和特征图上中心点的投影点 [ x c , y c ] T [x_c,y_c]^T [xc,yc]T以及相机内参的逆矩阵 K 3 ∗ 3 − 1 K^{-1}_{3*3} K3∗3−1,可得目标的3D位置(单位 m m m):
[ x y z ] = K 3 × 3 − 1 [ z ⋅ ( x c + δ x c ) z ⋅ ( y c + δ y c ) z ] \begin{bmatrix} {x}\\ {y}\\ {z}\\ \end{bmatrix}=K^{-1}_{3\times3}\begin{bmatrix} {z\cdot(x_c+\delta_{x_c})}\\ {z\cdot(y_c+\delta_{y_c})}\\ {z}\\ \end{bmatrix} ⎣⎡xyz⎦⎤=K3×3−1⎣⎡z⋅(xc+δxc)z⋅(yc+δyc)z⎦⎤
在3D框尺寸的计算前,先分析整个数据集得到得到所有目标的均值 [ h ˉ ] T [\bar{h}]^T [hˉ]T,然后使用预测得到的补偿系数 [ δ h , δ w , δ l ] [\delta_h,\delta_w,\delta_l] [δh,δw,δl]即可获取真正的尺寸:
[ h w l ] = [ h ˉ ⋅ e δ h w ˉ ⋅ e δ w l ˉ ⋅ e δ l ] \begin{bmatrix} {h}\\ {w}\\ {l}\\ \end{bmatrix}=\begin{bmatrix} {\bar{h}\cdot{e^{\delta_h}}}\\ {\bar{w}\cdot{e^{\delta_w}}}\\ {\bar{l}\cdot{e^{\delta_l}}}\\ \end{bmatrix} ⎣⎡hwl⎦⎤=⎣⎡hˉ⋅eδhwˉ⋅eδwlˉ⋅eδl⎦⎤
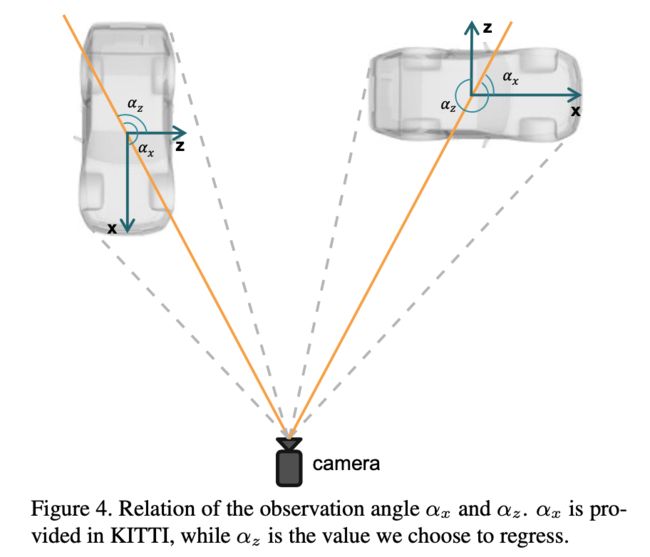
在航向角 θ \theta θ的估计中,论文中采取回归角度 α z \alpha_z αz(如下图),来作为计算航向角 θ \theta θ:
θ = α z + a r c t a n ( x z ) \theta=\alpha_z+arctan(\frac{x}{z}) θ=αz+arctan(zx)
最终,可得3D框的8个角点:
B = R θ [ ± h / 2 ± w / 2 ± l / 2 ] + [ x y z ] B=R_{\theta}\begin{bmatrix} {\pm{h/2}}\\ {\pm{w/2}}\\ {\pm{l/2}}\\ \end{bmatrix}+\begin{bmatrix} {x}\\ {y}\\ {z}\\ \end{bmatrix} B=Rθ⎣⎡±h/2±w/2±l/2⎦⎤+⎣⎡xyz⎦⎤
其中 R θ R_{\theta} Rθ代表航向角 θ \theta θ转变而来的矩阵, B B B代表8个角点表示的3D框。
Loss Function
Keypoint Classification分支的loss跟 C e n t e r N e t CenterNet CenterNet中一样,用的是focal loss。
Regression分支的loss计算比较有新意,没有采取直接计算 τ \tau τ中8个参数的loss,而是通过在角度、尺寸、坐标位置三种分支下得到的3D框的8个角点去和真值比较计算loss。
总loss:
L = L c l s + ∑ i = 1 3 L r e g ( B ^ i ) L=L_{cls}+\sum_{i=1}^3L_{reg}(\hat{B}_i) L=Lcls+i=1∑3Lreg(B^i)
其中 L c l s L_{cls} Lcls代表中心点的分类loss, i i i代表分支, B ^ i \hat{B}_i B^i代表预测框的8个角点, L r e g L_{reg} Lreg代表角点回归loss。
# mmdetection3d/mmdet3d/models/dense_heads/smoke_mono3d_head.py
# 角度分支下计算得到的3D框,所谓角度分支即只有角度用的是预测值,而坐标位置和尺寸两个用的是真值
bbox3d_yaws = self.bbox_coder.encode(gt_locations, gt_dimensions, orientations, img_metas)
# 尺寸分支下计算得到的3D框
bbox3d_dims = self.bbox_coder.encode(gt_locations, dimensions, gt_orientations, img_metas)
# 坐标位置分支下计算得到的3D框
bbox3d_locs = self.bbox_coder.encode(locations, gt_dimensions, gt_orientations, img_metas)
...
...
# 三种分支下分别计算推理出的8个角点的和真值8个角点的loss
loss_bbox_oris = self.loss_bbox(pred_bboxes['ori'].corners[reg_inds, ...], target_labels['gt_cors'][reg_inds, ...])
loss_bbox_dims = self.loss_bbox(pred_bboxes['dim'].corners[reg_inds, ...], target_labels['gt_cors'][reg_inds, ...])
loss_bbox_locs = self.loss_bbox(pred_bboxes['loc'].corners[reg_inds, ...], target_labels['gt_cors'][reg_inds, ...])
loss_bbox = loss_bbox_dims + loss_bbox_locs + loss_bbox_oris
Conclusion
纵目发表的这篇单目3D目标检测论文不同于以往用2D预选框建立3D信息,而是采取直接回归3D信息,这种思路简单又高效,并不需要复杂的前后处理,而且是一种one stage方法,对于实际业务部署也很友好。
如果本文对你有帮助,更多内容请关注微信公众号【杰读源码】
