NNDL 实验五 前馈神经网络(2)自动梯度计算 & 优化问题
自动梯度计算&优化问题
- 4.3 自动梯度计算和预定义算子
-
- 4.3.1 使用pytorch的预定义算子来重新实现二分类任务
- 4.3.2 完善Runner类
- 4.3.3 模型训练
- 4.3.4 性能评价
- 4.3.5 增加一个3个神经元的隐藏层,再次实现二分类,并与1做对比。(必做)
- 4.3.6 自定义隐藏层层数和每个隐藏层中的神经元个数,尝试找到最优超参数完成二分类。可以适当修改数据集,便于探索超参数。(选做)
- 4.4 优化问题
-
- 4.4.1 参数初始化
- 4.4.2 梯度消失问题
-
- 4.4.2.1 模型构建
- 4.4.2.2 使用Sigmoid型函数进行训练
- 4.4.2.3 使用ReLU函数进行模型训练
- 4.4.3 死亡ReLU问题
-
- 4.4.3.1 使用ReLU进行模型训练
- 4.4.3.2 使用Leaky ReLU进行模型训练
4.3 自动梯度计算和预定义算子
虽然我们能够通过模块化的方式比较好地对神经网络进行组装,但是每个模块的梯度计算过程仍然十分繁琐且容易出错。在深度学习框架中,已经封装了自动梯度计算的功能,我们只需要聚焦模型架构,不再需要耗费精力进行计算梯度。
飞桨提供了paddle.nn.Layer类,来方便快速的实现自己的层和模型。模型和层都可以基于paddle.nn.Layer扩充实现,模型只是一种特殊的层。
继承了paddle.nn.Layer类的算子中,可以在内部直接调用其它继承paddle.nn.Layer类的算子,飞桨框架会自动识别算子中内嵌的paddle.nn.Layer类算子,并自动计算它们的梯度,并在优化时更新它们的参数。
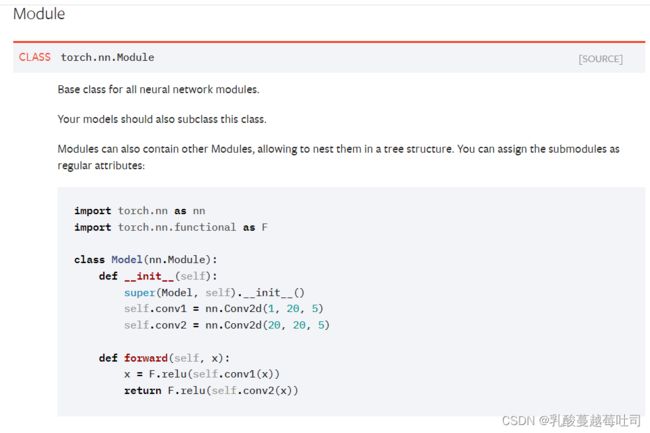
pytorch中的相应内容是什么?请简要介绍。
torch提供了torch.nn.Module类,来方便快速的实现自己的层和模型。模型和层都可以基于nn扩充实现,模型只是一种特殊的层。它继承了torch.nn.Module类的算子中,可以在内部直接调用其它继承的算子,torch框架会自动识别算子中内嵌的torch.nn.Module类算子,并自动计算它们的梯度,并在优化时更新它们的参数。
4.3.1 使用pytorch的预定义算子来重新实现二分类任务
需手动设置w和b。
import torch.nn as nn
import torch.nn.functional as F
import os
import torch
from abc import abstractmethod
import math
import numpy as np
import matplotlib.pyplot as plt
from torch.nn.init import normal_,constant_,uniform_
class Model_MLP_L2_V2(nn.Module):
def __init__(self, input_size, hidden_size, output_size):
super(Model_MLP_L2_V2, self).__init__()
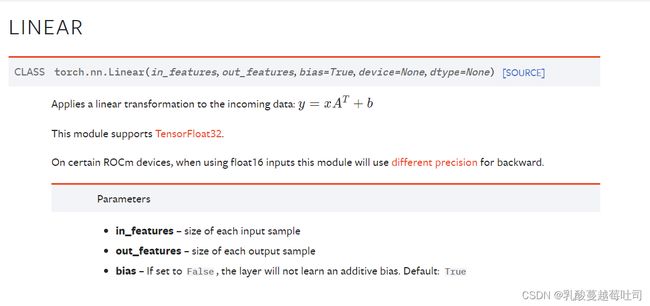
self.fc1 = nn.Linear(input_size, hidden_size)
normal_(self.fc1.weight, mean=0., std=1.)
constant_(self.fc1.bias, val=0.0)
self.fc2 = nn.Linear(hidden_size, output_size)
normal_(self.fc2.weight, mean=0., std=1.)
constant_(self.fc2.bias, val=0.0)
self.act_fn = torch.sigmoid
# 前向计算
def forward(self, inputs):
z1 = self.fc1(inputs)
a1 = self.act_fn(z1)
z2 = self.fc2(a1)
a2 = self.act_fn(z2)
return a2
make_moons函数:
import torch
def make_moons(n_samples=1000, shuffle=True, noise=None):
n_samples_out = n_samples // 2
n_samples_in = n_samples - n_samples_out
outer_circ_x = torch.cos(torch.linspace(0, math.pi, n_samples_out))
outer_circ_y = torch.sin(torch.linspace(0, math.pi, n_samples_out))
inner_circ_x = 1 - torch.cos(torch.linspace(0, math.pi, n_samples_in))
inner_circ_y = 0.5 - torch.sin(torch.linspace(0, math.pi, n_samples_in))
X = torch.stack(
[torch.cat([outer_circ_x, inner_circ_x]),
torch.cat([outer_circ_y, inner_circ_y])],
axis=1
)
y = torch.cat(
[torch.zeros([n_samples_out]), torch.ones([n_samples_in])]
)
if shuffle:
idx = torch.randperm(X.shape[0])
X = X[idx]
y = y[idx]
if noise is not None:
X += np.random.normal(0.0, noise, X.shape)
return X, y
accuracy函数:
def accuracy(preds, labels):
if preds.shape[1] == 1:
preds=(preds>=0.5).to(torch.float32)
else:
preds = torch.argmax(preds,dim=1).int()
return torch.mean((preds == labels).float())
4.3.2 完善Runner类
class RunnerV2_2(object):
def __init__(self, model, optimizer, metric, loss_fn, **kwargs):
self.model = model
self.optimizer = optimizer
self.loss_fn = loss_fn
self.metric = metric
# 记录训练过程中的评估指标变化情况
self.train_scores = []
self.dev_scores = []
# 记录训练过程中的评价指标变化情况
self.train_loss = []
self.dev_loss = []
def train(self, train_set, dev_set, **kwargs):
# 将模型切换为训练模式
self.model.train()
# 传入训练轮数,如果没有传入值则默认为0
num_epochs = kwargs.get("num_epochs", 0)
# 传入log打印频率,如果没有传入值则默认为100
log_epochs = kwargs.get("log_epochs", 100)
# 传入模型保存路径,如果没有传入值则默认为"best_model.pdparams"
save_path = kwargs.get("save_path", "best_model.pdparams")
# log打印函数,如果没有传入则默认为"None"
custom_print_log = kwargs.get("custom_print_log", None)
# 记录全局最优指标
best_score = 0
# 进行num_epochs轮训练
for epoch in range(num_epochs):
X, y = train_set
# 获取模型预测
logits = self.model(X.to(torch.float32))
# 计算交叉熵损失
trn_loss = self.loss_fn(logits, y)
self.train_loss.append(trn_loss.item())
# 计算评估指标
trn_score = self.metric(logits, y).item()
self.train_scores.append(trn_score)
# 自动计算参数梯度
trn_loss.backward()
if custom_print_log is not None:
# 打印每一层的梯度
custom_print_log(self)
# 参数更新
self.optimizer.step()
# 清空梯度
self.optimizer.zero_grad() # reset gradient
dev_score, dev_loss = self.evaluate(dev_set)
# 如果当前指标为最优指标,保存该模型
if dev_score > best_score:
self.save_model(save_path)
print(f"[Evaluate] best accuracy performence has been updated: {best_score:.5f} --> {dev_score:.5f}")
best_score = dev_score
if log_epochs and epoch % log_epochs == 0:
print(f"[Train] epoch: {epoch}/{num_epochs}, loss: {trn_loss.item()}")
@torch.no_grad()
def evaluate(self, data_set):
# 将模型切换为评估模式
self.model.eval()
X, y = data_set
# 计算模型输出
logits = self.model(X)
# 计算损失函数
loss = self.loss_fn(logits, y).item()
self.dev_loss.append(loss)
# 计算评估指标
score = self.metric(logits, y).item()
self.dev_scores.append(score)
return score, loss
# 模型测试阶段,使用'torch.no_grad()'控制不计算和存储梯度
@torch.no_grad()
def predict(self, X):
# 将模型切换为评估模式
self.model.eval()
return self.model(X)
# 使用'model.state_dict()'获取模型参数,并进行保存
def save_model(self, saved_path):
torch.save(self.model.state_dict(), saved_path)
# 使用'model.set_state_dict'加载模型参数
def load_model(self, model_path):
state_dict = torch.load(model_path)
self.model.load_state_dict(state_dict)
4.3.3 模型训练
# 设置模型
input_size = 2
hidden_size = 5
output_size = 1
model = Model_MLP_L2_V4(input_size=input_size, hidden_size=hidden_size, output_size=output_size)
# 设置损失函数
loss_fn = F.binary_cross_entropy
# 设置优化器
learning_rate = 0.2 #5e-2
optimizer = torch.optim.SGD(model.parameters(),lr=learning_rate)
# 设置评价指标
metric = accuracy
# 其他参数
epoch = 1000
saved_path = 'best_model.pdparams'
# 实例化RunnerV2类,并传入训练配置
runner = RunnerV2_2(model, optimizer, metric, loss_fn)
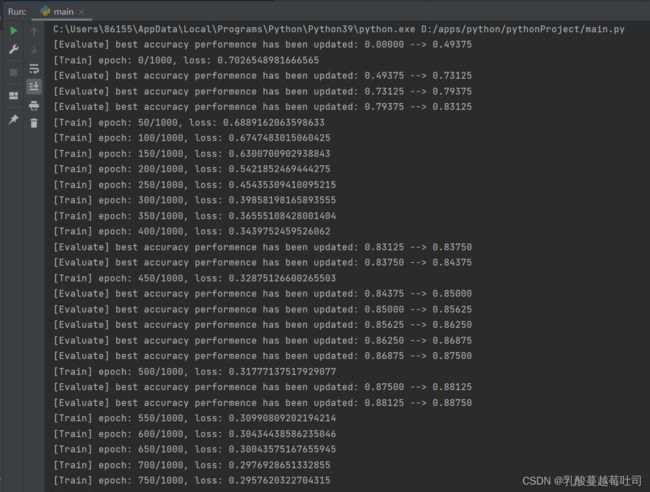
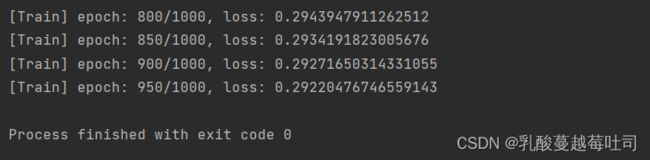
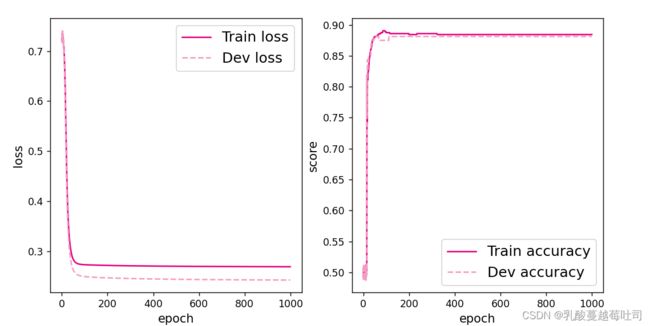
runner.train([X_train, y_train], [X_dev, y_dev], num_epochs = epoch, log_epochs=50, save_path="best_model.pdparams")
结果:
将训练过程中训练集与验证集的准确率变化情况进行可视化。
plot函数:
import matplotlib.pyplot as plt
def plot(runner, fig_name):
plt.figure(figsize=(10, 5))
epochs = [i for i in range(len(runner.train_scores))]
plt.subplot(1, 2, 1)
plt.plot(epochs, runner.train_loss, color='#e4007f', label="Train loss")
plt.plot(epochs, runner.dev_loss, color='#f19ec2', linestyle='--', label="Dev loss")
# 绘制坐标轴和图例
plt.ylabel("loss", fontsize='large')
plt.xlabel("epoch", fontsize='large')
plt.legend(loc='upper right', fontsize='x-large')
plt.subplot(1, 2, 2)
plt.plot(epochs, runner.train_scores, color='#e4007f', label="Train accuracy")
plt.plot(epochs, runner.dev_scores, color='#f19ec2', linestyle='--', label="Dev accuracy")
# 绘制坐标轴和图例
plt.ylabel("score", fontsize='large')
plt.xlabel("epoch", fontsize='large')
plt.legend(loc='lower right', fontsize='x-large')
plt.savefig(fig_name)
plt.show()
plot(runner, 'fw-acc.pdf')
结果:

4.3.4 性能评价
runner.load_model("best_model.pdparams")
score, loss = runner.evaluate([X_test, y_test])
print("[Test] score/loss: {:.4f}/{:.4f}".format(score, loss))
结果:

4.3.5 增加一个3个神经元的隐藏层,再次实现二分类,并与1做对比。(必做)
需做以下改动:
class Model_MLP_L2_V4(torch.nn.Module):
def __init__(self, input_size, hidden_size, hidden_size2, output_size):
super(Model_MLP_L2_V4, self).__init__()
self.fc1 = nn.Linear(input_size, hidden_size)
w1=torch.normal(0,0.1,size=(hidden_size,input_size),requires_grad=True)
self.fc1.weight = nn.Parameter(w1)
self.fc2 = nn.Linear(hidden_size, hidden_size2)
w2 = torch.normal(0, 0.1, size=(hidden_size2, hidden_size), requires_grad=True)
self.fc2.weight = nn.Parameter(w2)
self.fc3 = nn.Linear(hidden_size2, output_size)
w3 = torch.normal(0, 0.1, size=(output_size, hidden_size2), requires_grad=True)
self.fc3.weight = nn.Parameter(w3)
# 使用'torch.nn.functional.sigmoid'定义 Logistic 激活函数
self.act_fn = torch.sigmoid
# 前向计算
def forward(self, inputs):
z1 = self.fc1(inputs.to(torch.float32))
a1 = self.act_fn(z1)
z2 = self.fc2(a1)
a2 = self.act_fn(z2)
z3 = self.fc3(a2)
a3 = self.act_fn(z3)
return a3
# 设置模型
input_size = 2
hidden_size = 5
hidden_size2 = 3
output_size = 1
model = Model_MLP_L2_V4(input_size=input_size, hidden_size=hidden_size,hidden_size2=hidden_size2, output_size=output_size)
运行了好几次,loss和score都特别不稳定,有点小离谱。比如其中任意两次结果:



根据结果看出,跳不出极小值点,所以我调大学习率为3

发现这个效果一下就上去了,然后又多试了几次:

还算是比较稳定的,心满意足了。
通过结果我们可以显著的发现,增加了一层含有三个神经元的隐藏层后,误差和学习率均往好的方面走了!通过调试学习率,使结果也稳定了下来。
4.3.6 自定义隐藏层层数和每个隐藏层中的神经元个数,尝试找到最优超参数完成二分类。可以适当修改数据集,便于探索超参数。(选做)
定义隐藏层层数和神经元个数有些经验之谈。
隐藏层的层数
在神经网络中,当且仅当数据非线性分离时需要隐藏层。对于一般简单的数据集,一两层隐藏层就够了,对于涉及到时间序列和计算机视觉的复杂数据集,需要额外增加层数。单层神经网络只能用于线性分离函数(分类问题中两个类可以用一条直线整齐地分开)。多个隐藏层可以用于拟合非线性函数。隐藏层的层数与神经网络的效果,可以概括为:
- 没有隐藏层(none):仅能够表示线性可分函数或决策
- 隐藏层数=1:可以拟合任何“包含从一个有限空间到另一个有限空间的连续映射”的函数
- 隐藏层数=2:搭配适当的激活函数可以表示任意精度的任意决策边界,并且可以拟合任何精度的任何平滑映射
- 隐藏层数>2:多出来的隐藏层可以学习复杂的描述(某种自动特征工程)
层数越深,理论上拟合函数的能力增强,效果按理说会更好,但是实际上更深的层数可能会带来过拟合的问题,同时也会增加训练难度,使模型难以收敛。在使用BP神经网络时,最好可以参照已有的表现优异的模型,或者根据上面的表格,从一两层开始尝试,尽量不要使用太多的层数。在CV、NLP等特殊领域,可以使用CNN、RNN、attention等特殊模型,不能不考虑实际而直接无脑堆砌多层神经网络。尝试迁移和微调已有的预训练模型,能取得事半功倍的效果。
隐藏层中神经元数量
隐藏层中使用太少的神经元将导致欠拟合(underfitting)。相反,使用过多的神经元同样会导致一些问题。首先,隐藏层中的神经元过多可能会导致过拟合(overfitting)。当神经网络具有过多的节点(过多的信息处理能力)时,训练集中包含的有限信息量不足以训练隐藏层中的所有神经元,因此就会导致过拟合。即使训练数据包含的信息量足够,隐藏层中过多的神经元会增加训练时间,从而难以达到预期的效果。显然,选择一个合适的隐藏层神经元数量是至关重要的。
通常,对所有隐藏层使用相同数量的神经元就足够了。对于某些数据集,拥有较大的第一层并在其后跟随较小的层将导致更好的性能,因为第一层可以学习很多低阶的特征,这些较低层的特征可以馈入后续层中,提取出较高阶特征。
需要注意的是,与在每一层中添加更多的神经元相比,添加层层数将获得更大的性能提升。因此,不要在一个隐藏层中加入过多的神经元。
如何确定神经元数量,有大神给出了经验以供参考:
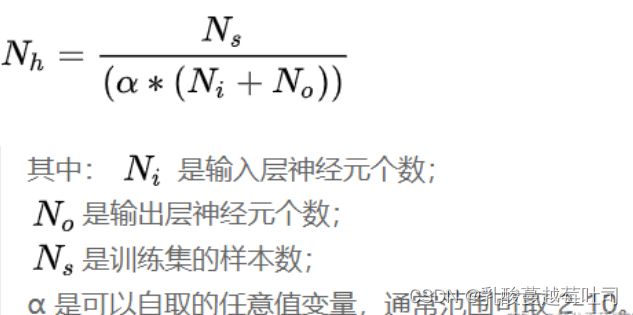
还有一种方法:
- 隐藏神经元的数量应在输入层的大小和输出层的大小之间。
- 隐藏神经元的数量应为输入层大小的2/3加上输出层大小的2/3。
- 隐藏神经元的数量应小于输入层大小的两倍。
隐藏层神经元最佳数量需要通过自己不断试验获得,建议从一个较小的数值比如1到5和1到100个神经元开始,如果欠拟合后会慢慢添加更多的层和神经元,如果过拟合就减小层数和神经元,实际过程中还可以考虑引入Batch Normalization, Dropout, early-stopping、添加正则化项等降低过拟合的方法。
参考文章:确定神经网络的层数和隐藏层的神经元数量
最后我决定隐藏层有一个或者两个,然后进行神经元的设置。上面实验结果发现了学习率太低跳不出局部最小值,下边的都以学习率为3做实验!
先是一个隐藏层5个神经元:
![]()
一个隐藏层4个神经元:
![]()

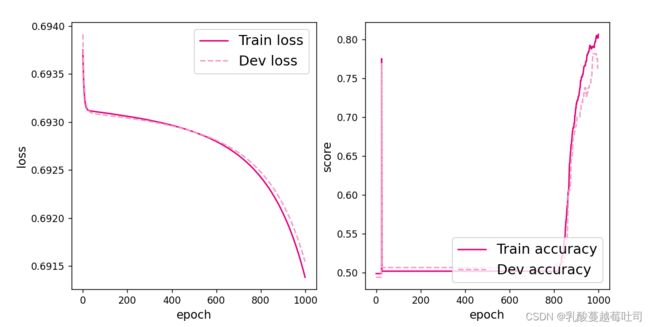
一个隐藏层3个神经元:
![]()
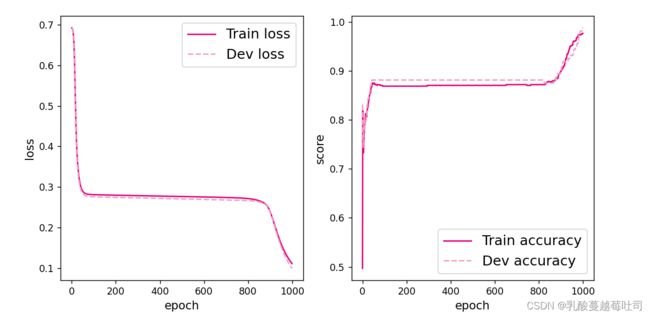
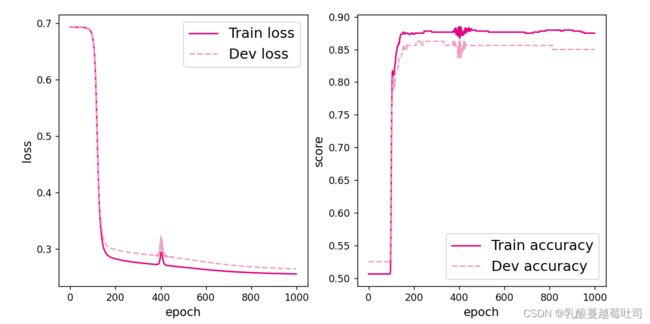
这个结果好好呀!惊到我了。然后我决定试试两个隐藏层都是5个神经元:
![]()

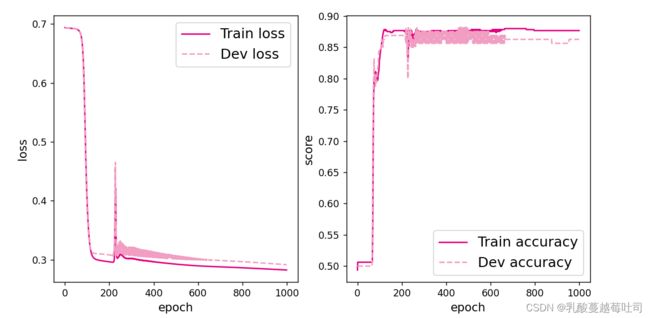
学习率下降了一些,把其中一个隐层的神经元变成3:
![]()

这个真的好!考虑到前边一直以学习率为3,现在调一下学习率变为5:
![]()

学习率反而下降了。
通过上边,我设置的两个隐层,一个神经元个数为5,另一个为3,学习率为3的参数下,模型性能相对最好。
【思考题】
自定义梯度计算和自动梯度计算:
从计算性能、计算结果等多方面比较,谈谈自己的看法。
pytorch提供的autograd包能够根据输入和前向传播过程自动构建计算图,并执行反向传播。autograd 包是 PyTorch 中所有神经网络的核心。首先让我们简要地介绍它,然后我们将会去训练我们的第一个神经网络。该 autograd 软件包为 Tensors 上的所有操作提供自动微分。它是一个由运行定义的框架,这意味着以代码运行方式定义你的后向传播,并且每次迭代都可以不同。
上次实验,手动计算梯度,得到的模型评价:
![]()
本次实验自动梯度计算模型评价:

不难发现自动梯度计算得到的模型效果更好,后向传播的计算部分变成loss.backward()方法,和之前的代码相比更加简洁。并且加入requires_grad=True之后,意味着所有后续跟params相关的调用和操作记录都会被保留下来,任何一个经过params变换得到的新的tensor都可以追踪它的变换记录,如果它的变换函数是可微的,导数的值会被自动放进params的grad属性中。
4.4 优化问题
4.4.1 参数初始化
实现一个神经网络前,需要先初始化模型参数。
如果对每一层的权重和偏置都用0初始化,那么通过第一遍前向计算,所有隐藏层神经元的激活值都相同;在反向传播时,所有权重的更新也都相同,这样会导致隐藏层神经元没有差异性,出现对称权重现象。
将模型参数全都初始化为0:
class Model_MLP_L2_V4(torch.nn.Module):
def __init__(self, input_size, hidden_size, output_size):
super(Model_MLP_L2_V4, self).__init__()
# 使用'torch.nn.Linear'定义线性层。
# 其中第一个参数(in_features)为线性层输入维度;第二个参数(out_features)为线性层输出维度
# weight为权重参数属性,bias为偏置参数属性,这里使用'torch.nn.init.constant_'进行常量初始化
self.fc1 = nn.Linear(input_size, hidden_size)
constant_(tensor=self.fc1.weight, val=0.0)
constant_(tensor=self.fc1.bias, val=0.0)
self.fc2 = nn.Linear(hidden_size, output_size)
constant_(tensor=self.fc2.weight, val=0.0)
constant_(tensor=self.fc2.bias, val=0.0)
# 使用'torch.nn.functional.sigmoid'定义 Logistic 激活函数
self.act_fn = F.sigmoid
# 前向计算
def forward(self, inputs):
z1 = self.fc1(inputs)
a1 = self.act_fn(z1)
z2 = self.fc2(a1)
a2 = self.act_fn(z2)
return a2
def print_weights(runner):
print('The weights of the Layers:')
for _, param in enumerate(runner.model.named_parameters()):
print(param)
利用Runner类训练模型:
# 设置模型
input_size = 2
hidden_size = 5
output_size = 1
model = Model_MLP_L2_V4(input_size=input_size, hidden_size=hidden_size, output_size=output_size)
# 设置损失函数
loss_fn = F.binary_cross_entropy
# 设置优化器
learning_rate = 0.2 #5e-2
optimizer = torch.optim.SGD(lr=learning_rate, params=model.parameters())
# 设置评价指标
metric = accuracy
# 其他参数
epoch = 2000
saved_path = 'best_model.pdparams'
# 实例化RunnerV2类,并传入训练配置
runner = RunnerV2_2(model, optimizer, metric, loss_fn)
runner.train([X_train, y_train], [X_dev, y_dev], num_epochs=5, log_epochs=50, save_path="best_model.pdparams",custom_print_log=print_weights)
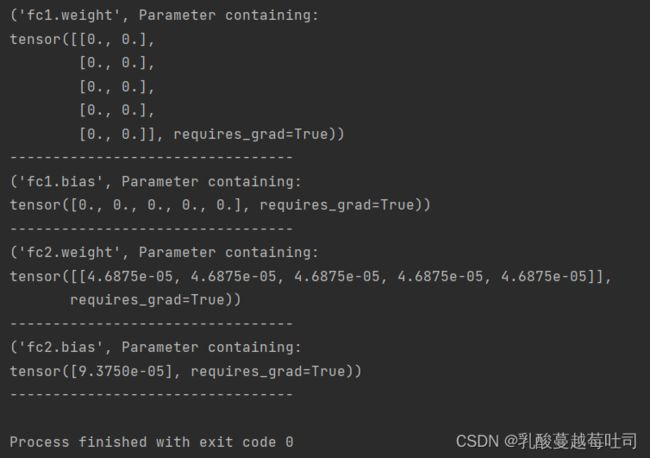
结果:
可视化训练和验证集上的主准确率和loss变化:
plot(runner, 'fw-acc.pdf')

从输出结果看,二分类准确率为50%左右,说明模型没有学到任何内容。训练和验证loss几乎没有怎么下降。
为了避免对称权重现象,可以使用高斯分布或均匀分布初始化神经网络的参数。
4.4.2 梯度消失问题
在神经网络的构建过程中,随着网络层数的增加,理论上网络的拟合能力也应该是越来越好的。但是随着网络变深,参数学习更加困难,容易出现梯度消失问题。
由于Sigmoid型函数的饱和性,饱和区的导数更接近于0,误差经过每一层传递都会不断衰减。当网络层数很深时,梯度就会不停衰减,甚至消失,使得整个网络很难训练,这就是所谓的梯度消失问题。
在深度神经网络中,减轻梯度消失问题的方法有很多种,一种简单有效的方式就是使用导数比较大的激活函数,如:ReLU。
4.4.2.1 模型构建
定义一个前馈神经网络,包含4个隐藏层和1个输出层,通过传入的参数指定激活函数。代码实现如下:
# 定义多层前馈神经网络
class Model_MLP_L5(torch.nn.Module):
def __init__(self, input_size, output_size, act='relu'):
super(Model_MLP_L5, self).__init__()
self.fc1 = torch.nn.Linear(input_size, 3)
w_ = torch.normal(0, 0.01, size=(3, input_size), requires_grad=True)
self.fc1.weight = nn.Parameter(w_)
self.fc1.bias = nn.init.constant_(self.fc1.bias, val=1.0)
w= torch.normal(0, 0.01, size=(3, 3), requires_grad=True)
self.fc2 = torch.nn.Linear(3, 3)
self.fc2.weight = nn.Parameter(w)
self.fc2.bias = nn.init.constant_(self.fc2.bias, val=1.0)
self.fc3 = torch.nn.Linear(3, 3)
self.fc3.weight = nn.Parameter(w)
self.fc3.bias = nn.init.constant_(self.fc3.bias, val=1.0)
self.fc4 = torch.nn.Linear(3, 3)
self.fc4.weight = nn.Parameter(w)
self.fc4.bias = nn.init.constant_(self.fc4.bias, val=1.0)
self.fc5 = torch.nn.Linear(3, output_size)
w1 = torch.normal(0, 0.01, size=(output_size, 3), requires_grad=True)
self.fc5.weight = nn.Parameter(w1)
self.fc5.bias = nn.init.constant_(self.fc5.bias, val=1.0)
# 定义网络使用的激活函数
if act == 'sigmoid':
self.act = F.sigmoid
elif act == 'relu':
self.act = F.relu
elif act == 'lrelu':
self.act = F.leaky_relu
else:
raise ValueError("Please enter sigmoid relu or lrelu!")
def forward(self, inputs):
outputs = self.fc1(inputs.to(torch.float32))
outputs = self.act(outputs)
outputs = self.fc2(outputs)
outputs = self.act(outputs)
outputs = self.fc3(outputs)
outputs = self.act(outputs)
outputs = self.fc4(outputs)
outputs = self.act(outputs)
outputs = self.fc5(outputs)
outputs = F.sigmoid(outputs)
return outputs
4.4.2.2 使用Sigmoid型函数进行训练
使用Sigmoid型函数作为激活函数,为了便于观察梯度消失现象,只进行一轮网络优化。代码实现如下:
# 学习率大小
lr = 0.01
# 定义网络,激活函数使用sigmoid
model = Model_MLP_L5(input_size=2, output_size=1, act='sigmoid')
# 定义优化器
optimizer = torch.optim.SGD(model.parameters(),lr=lr)
# 定义损失函数,使用交叉熵损失函数
loss_fn = F.binary_cross_entropy
# 定义评价指标
metric = accuracy
def print_grads(runner):
# 打印每一层的权重的模
print('The gradient of the Layers:')
for item in runner.model.named_parameters():
if len(item[1])==3:
print(item[0],".gard:")
print(torch.mean(item[1].grad))
print("=============")
# 指定梯度打印函数
custom_print_log = print_grads
# 实例化Runner类
runner = RunnerV2_2(model, optimizer, metric, loss_fn)
# 启动训练
runner.train([X_train, y_train], [X_dev, y_dev],
num_epochs=1, log_epochs=None,
save_path="best_model.pdparams",
custom_print_log=custom_print_log)
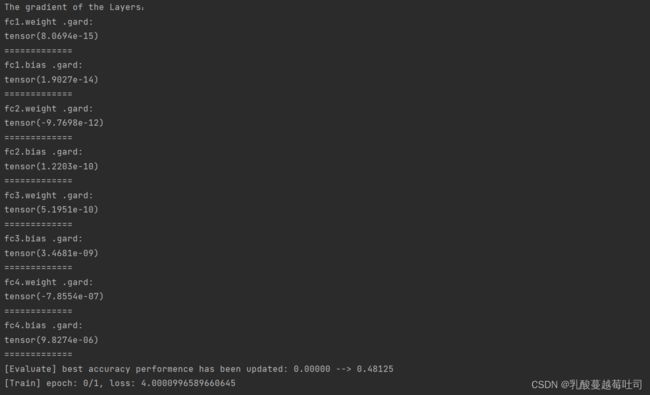
结果:

观察得出梯度经过每一个神经层的传递都会不断衰减,最终传递到第一个神经层时,梯度几乎完全消失。
4.4.2.3 使用ReLU函数进行模型训练
torch.manual_seed(102)
# 学习率大小
lr = 0.01
# 定义网络,激活函数使用sigmoid
model = Model_MLP_L5(input_size=2, output_size=1, act='sigmoid')
# 定义优化器
optimizer = torch.optim.SGD(model.parameters(), lr)
# 定义损失函数,使用交叉熵损失函数
loss_fn = F.binary_cross_entropy
# 定义评价指标
metric = accuracy
# 指定梯度打印函数
custom_print_log = print_grads
# 实例化Runner类
runner = RunnerV2_2(model, optimizer, metric, loss_fn)
# 启动训练
runner.train([X_train, y_train], [X_dev, y_dev],
num_epochs=1, log_epochs=None,
save_path="best_model.pdparams",
custom_print_log=custom_print_log)
结果:

4.4.3 死亡ReLU问题
ReLU激活函数可以一定程度上改善梯度消失问题,但是ReLU函数在某些情况下容易出现死亡 ReLU问题,使得网络难以训练。这是由于当x<0时,ReLU函数的输出恒为0。在训练过程中,如果参数在一次不恰当的更新后,某个ReLU神经元在所有训练数据上都不能被激活(即输出为0),那么这个神经元自身参数的梯度永远都会是0,在以后的训练过程中永远都不能被激活。而一种简单有效的优化方式就是将激活函数更换为Leaky ReLU、ELU等ReLU的变种。
4.4.3.1 使用ReLU进行模型训练
# 定义多层前馈神经网络
class Model_MLP_L5(torch.nn.Module):
def __init__(self, input_size, output_size, act='relu'):
super(Model_MLP_L5, self).__init__()
self.fc1 = torch.nn.Linear(input_size, 3)
w_ = torch.normal(0, 0.01, size=(3, input_size), requires_grad=True)
self.fc1.weight = nn.Parameter(w_)
# self.fc1.bias = nn.init.constant_(self.fc1.bias, val=1.0)
self.fc1.bias = nn.init.constant_(self.fc1.bias, val=-8.0)
w= torch.normal(0, 0.01, size=(3, 3), requires_grad=True)
self.fc2 = torch.nn.Linear(3, 3)
self.fc2.weight = nn.Parameter(w)
# self.fc2.bias = nn.init.constant_(self.fc2.bias, val=1.0)
self.fc1.bias = nn.init.constant_(self.fc1.bias, val=-8.0)
self.fc3 = torch.nn.Linear(3, 3)
self.fc3.weight = nn.Parameter(w)
# self.fc3.bias = nn.init.constant_(self.fc2.bias, val=1.0)
self.fc3.bias = nn.init.constant_(self.fc3.bias, val=-8.0)
self.fc4 = torch.nn.Linear(3, 3)
self.fc4.weight = nn.Parameter(w)
# self.fc4.bias = nn.init.constant_(self.fc2.bias, val=1.0)
self.fc4.bias = nn.init.constant_(self.fc4.bias, val=-8.0)
self.fc5 = torch.nn.Linear(3, output_size)
w1 = torch.normal(0, 0.01, size=(output_size, 3), requires_grad=True)
self.fc5.weight = nn.Parameter(w1)
# self.fc5.bias = nn.init.constant_(self.fc2.bias, val=1.0)
self.fc5.bias = nn.init.constant_(self.fc5.bias, val=-8.0)
# 定义网络使用的激活函数
if act == 'sigmoid':
self.act = F.sigmoid
elif act == 'relu':
self.act = F.relu
elif act == 'lrelu':
self.act = F.leaky_relu
else:
raise ValueError("Please enter sigmoid relu or lrelu!")
def forward(self, inputs):
outputs = self.fc1(inputs.to(torch.float32))
outputs = self.act(outputs)
outputs = self.fc2(outputs)
outputs = self.act(outputs)
outputs = self.fc3(outputs)
outputs = self.act(outputs)
outputs = self.fc4(outputs)
outputs = self.act(outputs)
outputs = self.fc5(outputs)
outputs = F.sigmoid(outputs)
return outputs
结果:

从输出结果可以发现,使用 ReLU 作为激活函数,当满足条件时,会发生死亡ReLU问题,网络训练过程中 ReLU 神经元的梯度始终为0,参数无法更新。针对死亡ReLU问题,一种简单有效的优化方式就是将激活函数更换为Leaky ReLU、ELU等ReLU 的变种。接下来,观察将激活函数更换为 Leaky ReLU时的梯度情况。
4.4.3.2 使用Leaky ReLU进行模型训练
# 定义网络,激活函数使用sigmoid
model = Model_MLP_L5(input_size=2, output_size=1, act='lrelu')
# 实例化Runner类
runner = RunnerV2_2(model, optimizer, metric, loss_fn)
# 启动训练
runner.train([X_train, y_train], [X_dev, y_dev],
num_epochs=1, log_epochps=None,
save_path="best_model.pdparams",
custom_print_log=custom_print_log)
结果:
从输出结果可以看到,将激活函数更换为Leaky ReLU后,死亡ReLU问题得到了改善,梯度恢复正常,参数也可以正常更新。但是由于 Leaky ReLU 中,x<0 时的斜率默认只有0.01,所以反向传播时,随着网络层数的加深,梯度值越来越小。如果想要改善这一现象,将 Leaky ReLU 中,x<0 时的斜率调大即可。
总结:看了同学的博客知道了一个更全的pytorch和paddle的转换关系,在初始化模型的时候也会注意到不同的小细节。
通过自定义隐层和对应的神经元数量,这个调参的过程让我直观的感受了一下参数不同对模型性能的影响,但看其他同学博客还对噪声进行了调参,希望下次能深刻的理解一下这个参数。