SSD(Single Shot MultiBox Detector)
一.概述
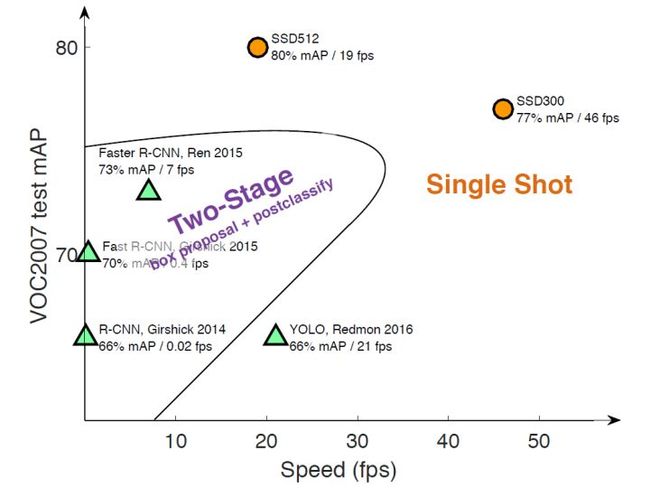
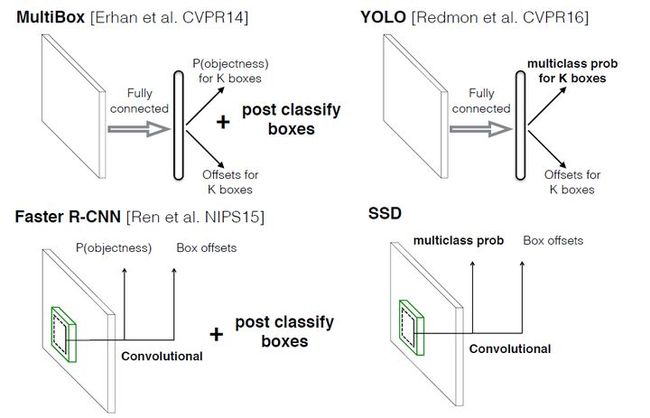
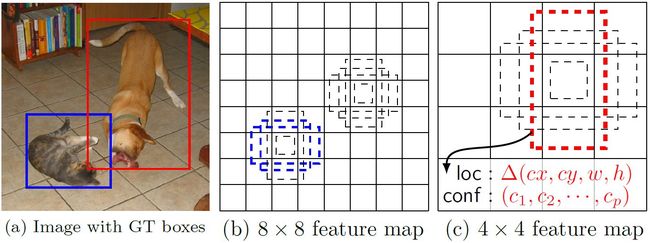
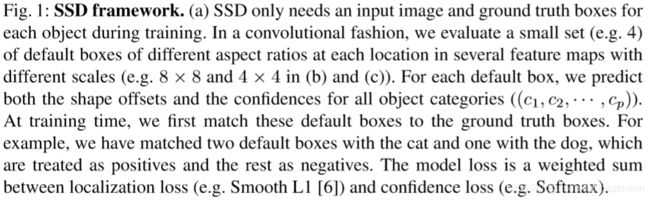
本文讲解的是SSD算法,其英文全名是Single Shot MultiBox Detector,名字取得不错,Single shot指明了SSD算法属于one-stage方法,MultiBox指明了SSD是多框预测。从图1可以看到,SSD算法在准确度和速度(除了SSD512)上都比Yolo要好很多。图2给出了不同算法的基本框架图,对于Faster R-CNN,其先通过CNN得到候选框,然后再进行分类与回归,而Yolo与SSD可以一步到位完成检测。相比Yolo,SSD采用CNN来直接进行检测,而不是像Yolo那样在全连接层之后做检测。其实采用卷积直接做检测只是SSD相比Yolo的其中一个不同点,另外还有两个重要的改变,一是SSD提取了不同尺度的特征图来做检测,大尺度特征图(较靠前的特征图)可以用来检测小物体,而小尺度特征图(较靠后的特征图)用来检测大物体;二是SSD采用了不同尺度和长宽比的先验框(Prior boxes, Default boxes,在Faster R-CNN中叫做锚,Anchors)。Yolo算法缺点是难以检测小目标,而且定位不准,但是这几点重要改进使得SSD在一定程度上克服这些缺点。下面我们详细讲解SDD算法的原理。
这篇文章在既保证速度,又要保证精度的情况下,提出了 SSD 物体检测模型,与现在流行的检测模型一样,将检测过程整个成一个 single deep neural network。便于训练与优化,同时提高检测速度。
SSD 将输出一系列 离散化(discretization) 的 bounding boxes,这些 bounding boxes 是在 不同层次(layers) 上的 feature maps 上生成的,并且有着不同的 aspect ratio。
在 prediction 阶段:
要计算出每一个 default box 中的物体,其属于每个类别的可能性,即 score,得分。如对于 PASCAL VOC 数据集,总共有 20 类,那么得出每一个 bounding box 中物体属于这 20 个类别的每一种的可能性。
同时,要对这些 bounding boxes 的 shape 进行微调,以使得其符合物体的 外接矩形。
还有就是,为了处理相同物体的不同尺寸的情况,SSD 结合了不同分辨率的 feature maps 的 predictions。
相对于那些需要 object proposals 的检测模型,本文的 SSD 方法完全取消了 proposals generation、pixel resampling 或者 feature resampling 这些阶段。这样使得 SSD 更容易去优化训练,也更容易地将检测模型融合进系统之中。
在 PASCAL VOC、MS COCO、ILSVRC 数据集上的实验显示,SSD 在保证精度的同时,其速度要比用 region proposals 的方法要快很多。
SSD 相比较于其他单结构模型(YOLO),SSD 取得更高的精度,即是是在输入图像较小的情况下。如输入 300×300300×300 大小的 PASCAL VOC 2007 test 图像,在 Titan X 上,SSD 以 58 帧的速率,同时取得了 72.1% 的 mAP。
如果输入的图像是 500×500500×500,SSD 则取得了 75.1% 的 mAP,比目前最 state-of-art 的 Faster R-CNN 要好很多。
二.设计理念
SSD和Yolo一样都是采用一个CNN网络来进行检测,但是却采用了多尺度的特征图,其基本架构如下图所示。下面将SSD核心设计理念总结为以下三点:
(1)采用多尺度特征图用于检测
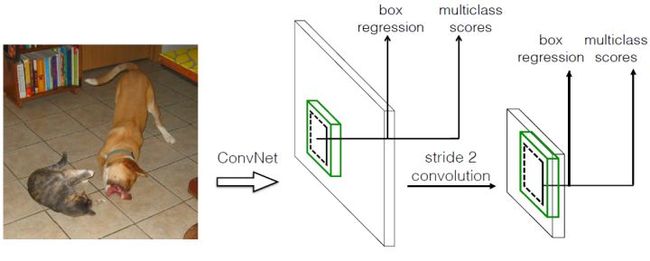
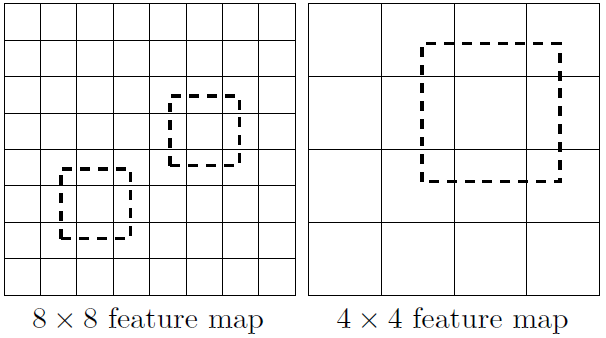
截断basenetwork,即去掉其最后的fc层,引入卷积层做最后的预测。所谓多尺度采用大小不同的特征图,CNN网络一般前面的特征图比较大,后面会逐渐采用stride=2的卷积或者pool来降低特征图大小,这正如图3所示,一个比较大的特征图和一个比较小的特征图,它们都用来做检测。这样做的好处是比较大的特征图来用来检测相对较小的目标,而小的特征图负责检测大目标,如图4所示,8x8的特征图可以划分更多的单元,但是其每个单元的先验框尺度比较小。(总共用6个特征图进行检测)
(2)采用卷积进行检测
与Yolo最后采用全连接层不同,SSD直接采用卷积对不同的特征图来进行提取检测结果。对于形状为![]() 的特征图,只需要采用
的特征图,只需要采用![]() 这样比较小的卷积核得到检测值。
这样比较小的卷积核得到检测值。
3)设置先验框
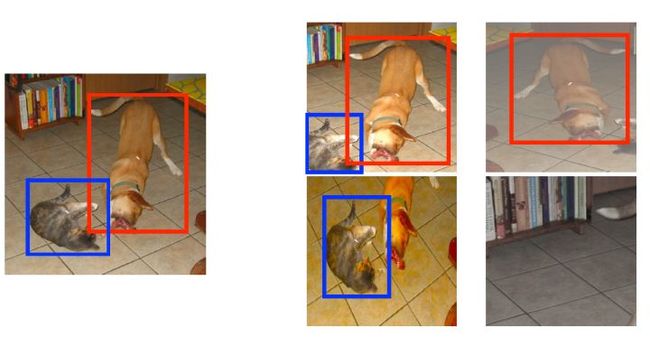
在Yolo中,每个单元预测多个边界框,但是其都是相对这个单元本身(正方块),但是真实目标的形状是多变的,Yolo需要在训练过程中自适应目标的形状。而SSD借鉴了Faster R-CNN中anchor的理念,每个单元设置尺度或者长宽比不同的先验框,预测的边界框(bounding boxes)是以这些先验框为基准的,在一定程度上减少训练难度。一般情况下,每个单元会设置多个先验框,其尺度和长宽比存在差异,如下图所示,可以看到每个单元使用了4个不同的先验框,图片中猫和狗分别采用最适合它们形状的先验框来进行训练,后面会详细讲解训练过程中的先验框匹配原则。
对于featuremap上的每个cell,对应k个bounding box,每一个bounding box预测c个类别分数和4个相对于先验anchor的offset,
这样每一个cell对应![]() 个filter,这些filter一般都是3*3大小的,即为featuremap为m*n*p,则filter对应为3*3*p*(k*(c+4))的维度尺寸,在卷积时通过padding使得卷积后的featuremap与用作卷积的featuremap大小相同,即都是m*n。
个filter,这些filter一般都是3*3大小的,即为featuremap为m*n*p,则filter对应为3*3*p*(k*(c+4))的维度尺寸,在卷积时通过padding使得卷积后的featuremap与用作卷积的featuremap大小相同,即都是m*n。
该副图的说明如下:
SSD的检测值也与Yolo不太一样。对于每个单元的每个先验框,其都输出一套独立的检测值,对应一个边界框,主要分为两个部分。第一部分是各个类别的置信度或者评分,值得注意的是SSD将背景也当做了一个特殊的类别,如果检测目标共有c个类别,SSD其实需要预测c+1个置信度值,其中第一个置信度指的是不含目标或者属于背景的评分。后面当我们说c个类别置信度时,请记住里面包含背景那个特殊的类别,即真实的检测类别只有c-1个。在预测过程中,置信度最高的那个类别就是边界框所属的类别,特别地,当第一个置信度值最高时,表示边界框中并不包含目标。第二部分就是边界框的location,包含4个值 ,分别表示边界框的中心坐标以及宽高。但是真实预测值其实只是边界框相对于先验框的转换值(paper里面说是offset,但是觉得transformation更合适,参见R-CNN)。先验框位置用
,分别表示边界框的中心坐标以及宽高。但是真实预测值其实只是边界框相对于先验框的转换值(paper里面说是offset,但是觉得transformation更合适,参见R-CNN)。先验框位置用 表示,其对应边界框用
表示,其对应边界框用 表示,那么边界框的预测值 l 其实是 b 相对于 d 的转换值:
表示,那么边界框的预测值 l 其实是 b 相对于 d 的转换值:
![]()
![]()
习惯上,我们称上面这个过程为边界框的编码(encode),预测时,你需要反向这个过程,即进行解码(decode),从预测值 l中得到边界框的真实位置b:
![]()
然而,在SSD的Caffe源码实现中还有trick,那就是设置variance超参数来调整检测值,通过bool参数variance_encoded_in_target来控制两种模式,当其为True时,表示variance被包含在预测值中,就是上面那种情况。但是如果是False(大部分采用这种方式,训练更容易?),就需要手动设置超参数variance,用来对 l 的4个值进行放缩,此时边界框需要这样解码:
综上所述,对于一个大小 的特征图,共有
的特征图,共有![]() 个单元,每个单元设置的先验框数目记为k,那么每个单元共需要
个单元,每个单元设置的先验框数目记为k,那么每个单元共需要![]() 个预测值,所有的单元共需要
个预测值,所有的单元共需要 个预测值,由于SSD采用卷积做检测,所以就需要
个预测值,由于SSD采用卷积做检测,所以就需要![]() 个卷积核完成这个特征图的检测过程。
个卷积核完成这个特征图的检测过程。
三.网络结构
SSD采用VGG16作为基础模型,然后在VGG16的基础上新增了卷积层来获得更多的特征图以用于检测。SSD的网络结构如下图所示。上面是SSD模型,下面是Yolo模型,可以明显看到SSD利用了多尺度的特征图做检测。模型的输入图片大小是 ![]() (还可以是
(还可以是![]() ,其与前者网络结构没有差别,只是最后新增一个卷积层,本文不再讨论)。
,其与前者网络结构没有差别,只是最后新增一个卷积层,本文不再讨论)。 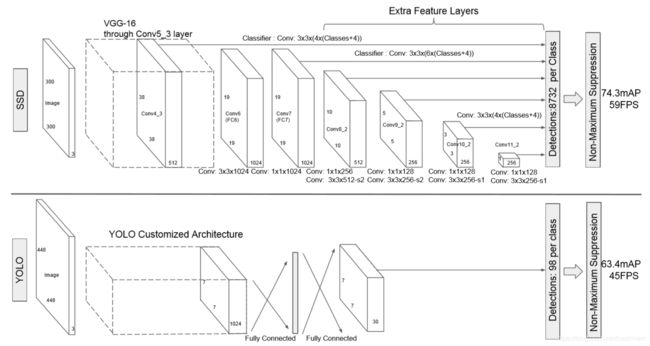
采用VGG16做基础模型,首先VGG16是在ILSVRC CLS-LOC数据集预训练。然后借鉴了DeepLab-LargeFOV,分别将VGG16的全连接层fc6和fc7转换成 卷积层 conv6和
卷积层 conv6和  卷积层conv7,同时将池化层pool5由原来的stride=2的
卷积层conv7,同时将池化层pool5由原来的stride=2的 变成stride=1的 (猜想是不想reduce特征图大小),为了配合这种变化,采用了一种Atrous Algorithm,其实就是conv6采用扩展卷积或带孔卷积(Dilation Conv),其在不增加参数与模型复杂度的条件下指数级扩大卷积的视野,其使用扩张率(dilation rate)参数,来表示扩张的大小,如下图所示,(a)是普通的卷积,其视野就是 ,(b)是扩张率为2,此时视野变成
变成stride=1的 (猜想是不想reduce特征图大小),为了配合这种变化,采用了一种Atrous Algorithm,其实就是conv6采用扩展卷积或带孔卷积(Dilation Conv),其在不增加参数与模型复杂度的条件下指数级扩大卷积的视野,其使用扩张率(dilation rate)参数,来表示扩张的大小,如下图所示,(a)是普通的卷积,其视野就是 ,(b)是扩张率为2,此时视野变成 ,(c)扩张率为4时,视野扩大为
,(c)扩张率为4时,视野扩大为![]() ,但是视野的特征更稀疏了。Conv6采用大小但dilation rate=6的扩展卷积。
,但是视野的特征更稀疏了。Conv6采用大小但dilation rate=6的扩展卷积。

然后移除dropout层和fc8层,并新增一系列卷积层,在检测数据集上做finetuing。
其中VGG16中的Conv4_3层将作为用于检测的第一个特征图。conv4_3层特征图大小是![]() ,但是该层比较靠前,其norm较大,所以在其后面增加了一个L2 Normalization层(参见ParseNet),以保证和后面的检测层差异不是很大,这个和Batch Normalization层不太一样,其仅仅是对每个像素点在channle维度做归一化,而Batch Normalization层是在[batch_size, width, height]三个维度上做归一化。归一化后一般设置一个可训练的放缩变量gamma,使用TF可以这样简单实现:
,但是该层比较靠前,其norm较大,所以在其后面增加了一个L2 Normalization层(参见ParseNet),以保证和后面的检测层差异不是很大,这个和Batch Normalization层不太一样,其仅仅是对每个像素点在channle维度做归一化,而Batch Normalization层是在[batch_size, width, height]三个维度上做归一化。归一化后一般设置一个可训练的放缩变量gamma,使用TF可以这样简单实现:
# l2norm (not bacth norm, spatial normalization)
def l2norm(x, scale, trainable=True, scope="L2Normalization"):
n_channels = x.get_shape().as_list()[-1]
l2_norm = tf.nn.l2_normalize(x, [3], epsilon=1e-12)
with tf.variable_scope(scope):
gamma = tf.get_variable("gamma", shape=[n_channels, ], dtype=tf.float32,
initializer=tf.constant_initializer(scale),
trainable=trainable)
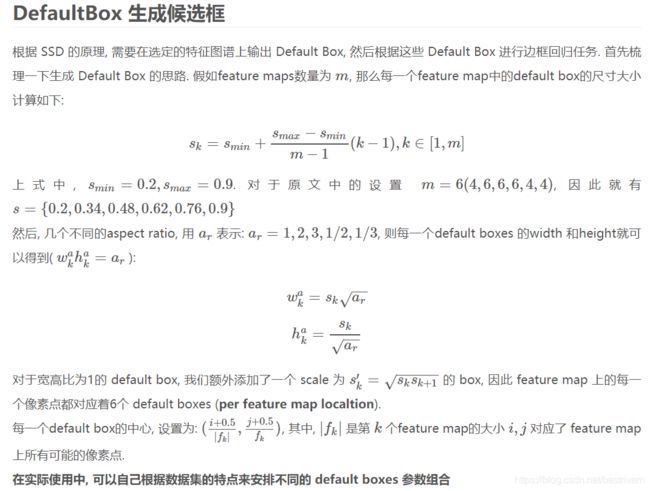
return l2_norm * gamma从后面新增的卷积层中提取Conv7,Conv8_2,Conv9_2,Conv10_2,Conv11_2作为检测所用的特征图,加上Conv4_3层,共提取了6个特征图,其大小分别是 ,但是不同特征图设置的先验框数目不同(同一个特征图上每个单元设置的先验框是相同的,这里的数目指的是一个单元的先验框数目)。先验框的设置,包括尺度(或者说大小)和长宽比两个方面。对于先验框的尺度,其遵守一个线性递增规则:随着特征图大小降低,先验框尺度线性增加:
,但是不同特征图设置的先验框数目不同(同一个特征图上每个单元设置的先验框是相同的,这里的数目指的是一个单元的先验框数目)。先验框的设置,包括尺度(或者说大小)和长宽比两个方面。对于先验框的尺度,其遵守一个线性递增规则:随着特征图大小降低,先验框尺度线性增加:
![]()
其中m指的特征图个数,但却是5,因为第一层(Conv4_3层)是单独设置的, 表示先验框大小相对于图片的比例,而
表示先验框大小相对于图片的比例,而 和
和 表示比例的最小值与最大值,paper里面取0.2和0.9。对于第一个特征图,其先验框的尺度比例一般设置为
表示比例的最小值与最大值,paper里面取0.2和0.9。对于第一个特征图,其先验框的尺度比例一般设置为![]() ,那么尺度为
,那么尺度为 。对于后面的特征图,先验框尺度按照上面公式线性增加,但是先将尺度比例先扩大100倍,此时增长步长为
。对于后面的特征图,先验框尺度按照上面公式线性增加,但是先将尺度比例先扩大100倍,此时增长步长为 ,这样各个特征图的为
,这样各个特征图的为 ,将这些比例除以100,然后再乘以图片大小,可以得到各个特征图的尺度为
,将这些比例除以100,然后再乘以图片大小,可以得到各个特征图的尺度为![]() ,这种计算方式是参考SSD的Caffe源码。综上,可以得到各个特征图的先验框尺度
,这种计算方式是参考SSD的Caffe源码。综上,可以得到各个特征图的先验框尺度![]() 。对于长宽比,一般选取
。对于长宽比,一般选取![]() ,对于特定的长宽比,按如下公式计算先验框的宽度与高度(后面的均指的是先验框实际尺度,而不是尺度比例):
,对于特定的长宽比,按如下公式计算先验框的宽度与高度(后面的均指的是先验框实际尺度,而不是尺度比例):
![]()
默认情况下,每个特征图会有一个![]() 且尺度为的先验框,除此之外,还会设置一个尺度为
且尺度为的先验框,除此之外,还会设置一个尺度为 且
且![]() 的先验框,这样每个特征图都设置了两个长宽比为1但大小不同的正方形先验框。注意最后一个特征图需要参考一个虚拟
的先验框,这样每个特征图都设置了两个长宽比为1但大小不同的正方形先验框。注意最后一个特征图需要参考一个虚拟 来计算 。因此,每个特征图一共有6个先验框
来计算 。因此,每个特征图一共有6个先验框 ,但是在实现时,Conv4_3,Conv10_2和Conv11_2层仅使用4个先验框,它们不使用长宽比为
,但是在实现时,Conv4_3,Conv10_2和Conv11_2层仅使用4个先验框,它们不使用长宽比为![]() 的先验框。每个单元的先验框的中心点分布在各个单元的中心,即
的先验框。每个单元的先验框的中心点分布在各个单元的中心,即![]() ,其中
,其中![]() 为特征图的大小。
为特征图的大小。
得到了特征图之后,需要对特征图进行卷积得到检测结果,下图给出了一个 大小的特征图的检测过程。其中Priorbox是得到先验框,前面已经介绍了生成规则。检测值包含两个部分:类别置信度和边界框位置,各采用一次卷积来进行完成。令
大小的特征图的检测过程。其中Priorbox是得到先验框,前面已经介绍了生成规则。检测值包含两个部分:类别置信度和边界框位置,各采用一次卷积来进行完成。令  为该特征图所采用的先验框数目,那么类别置信度需要的卷积核数量为
为该特征图所采用的先验框数目,那么类别置信度需要的卷积核数量为![]() ,而边界框位置需要的卷积核数量为
,而边界框位置需要的卷积核数量为 。由于每个先验框都会预测一个边界框,所以SSD300一共可以预测
。由于每个先验框都会预测一个边界框,所以SSD300一共可以预测 ![]()
个边界框,这是一个相当庞大的数字,所以说SSD本质上是密集采样。

对于以上的default box的生成,如果还有疑惑,可见下面的源码:
class PriorBox(object):
"""Compute priorbox coordinates in center-offset form for each source
feature map.
"""
def __init__(self, cfg):
super(PriorBox, self).__init__()
self.image_size = cfg['min_dim'] # 图片尺寸:300
# number of priors for feature map location (either 4 or 6)
self.num_priors = len(cfg['aspect_ratios']) # featuremap上每一个点的prior box数量,为4或者6
self.variance = cfg['variance'] or [0.1] # variance参数
self.feature_maps = cfg['feature_maps'] # 做检测用的选取的featuremap的尺寸
self.min_sizes = cfg['min_sizes']
self.max_sizes = cfg['max_sizes']
self.steps = cfg['steps'] # 放缩的尺寸,有关系:self.image_size/self.steps=self.feature_maps
self.aspect_ratios = cfg['aspect_ratios'] # 纵横比
self.clip = cfg['clip'] # 是否做clip操作
self.version = cfg['name'] # coco or voc
for v in self.variance:
if v <= 0:
raise ValueError('Variances must be greater than 0')
def forward(self):
mean = []
for k, f in enumerate(self.feature_maps):
for i, j in product(range(f), repeat=2):
f_k = self.image_size / self.steps[k]
# unit center x,y
cx = (j + 0.5) / f_k
cy = (i + 0.5) / f_k
# aspect_ratio: 1
# rel size: min_size
s_k = self.min_sizes[k]/self.image_size
mean += [cx, cy, s_k, s_k]
# aspect_ratio: 1
# rel size: sqrt(s_k * s_(k+1))
s_k_prime = sqrt(s_k * (self.max_sizes[k]/self.image_size))
mean += [cx, cy, s_k_prime, s_k_prime]
# rest of aspect ratios
for ar in self.aspect_ratios[k]:
mean += [cx, cy, s_k*sqrt(ar), s_k/sqrt(ar)]
mean += [cx, cy, s_k/sqrt(ar), s_k*sqrt(ar)]
# back to torch land
output = torch.Tensor(mean).view(-1, 4)
if self.clip:
output.clamp_(max=1, min=0)
return output
四.训练过程
(1).先验框匹配
在训练过程中,首先要确定训练图片中的ground truth(真实目标)与哪个先验框来进行匹配,与之匹配的先验框所对应的边界框将负责预测它。在Yolo中,ground truth的中心落在哪个单元格,该单元格中与其IOU最大的边界框负责预测它。但是在SSD中却完全不一样,SSD的先验框与ground truth的匹配原则主要有两点。首先,对于图片中每个ground truth,找到与其IOU最大的先验框,该先验框与其匹配,这样,可以保证每个ground truth一定与某个先验框匹配。通常称与ground truth匹配的先验框为正样本(其实应该是先验框对应的预测box,不过由于是一一对应的就这样称呼了),反之,若一个先验框没有与任何ground truth进行匹配,那么该先验框只能与背景匹配,就是负样本。一个图片中ground truth是非常少的, 而先验框却很多,如果仅按第一个原则匹配,很多先验框会是负样本,正负样本极其不平衡,所以需要第二个原则。第二个原则是:对于剩余的未匹配先验框,若某个ground truth的IOU大于某个阈值(一般是0.5),那么该先验框也与这个ground truth进行匹配。这意味着某个ground truth可能与多个先验框匹配,这是可以的。但是反过来却不可以,因为一个先验框只能匹配一个ground truth,如果多个ground truth与某个先验框 IOU大于阈值,那么先验框只与IOU最大的那个先验框进行匹配。第二个原则一定在第一个原则之后进行,仔细考虑一下这种情况,如果某个ground truth所对应最大IOU小于阈值,并且所匹配的先验框却与另外一个ground truth的 IOU大于阈值,那么该先验框应该匹配谁,答案应该是前者,首先要确保某个ground truth一定有一个先验框与之匹配。但是,这种情况我觉得基本上是不存在的。由于先验框很多,某个ground truth的最大 IOU肯定大于阈值,所以可能只实施第二个原则既可以了,这里的就是只实施了第二个原则,但是这里的Pytorch两个原则都实施了。下图为一个匹配示意图,其中绿色的GT是ground truth,红色为先验框,FP表示负样本,TP表示正样本。
以上的匹配原则总结为:
- 每一个gt与其IOU最大的先验框匹配
- 在剩余的未匹配先验框,选择与gt的IOU超过阈值(默认为0.5)的先验框进行匹配
- 整体原则:每一个gt必须至少有一个先验框匹配,一个gt可以同时匹配多个先验框,而一个先验框最多只能与一个gt进行匹配。

尽管一个ground truth可以与多个先验框匹配,但是ground truth相对先验框还是太少了,所以负样本相对正样本会很多。为了保证正负样本尽量平衡,SSD采用了hard negative mining,就是对负样本进行抽样,抽样时按照置信度误差(预测背景的置信度越小,误差越大)进行降序排列,选取误差较大的top-k作为训练的负样本,以保证正负样本比例接近1:3。(这使得模型的收敛速度加快,整体的训练速度也更快)
hard negative mining:
negative,即负样本,hard 说明是难以正确分类的样本,也就是说在对负样本分类时候,loss比较大(label与prediction相差较大)的那些样本,也可以说是容易将负样本看成正样本的那些样本;
在SSD中,即将负样本按照背景的置信度进行升序排列,(背景置信度小即说明容易被分成目标的可能性大,即为hard negative样本),选择top-k作为训练用的负样本,保证训练时正负样本比例接近1:3。
(2)损失函数
训练样本确定了,然后就是损失函数了。损失函数定义为位置误差(locatization loss, loc)与置信度误差(confidence loss, conf)的加权和:

其中N是先验框的正样本数量。这里 为一个指示参数,当
为一个指示参数,当 ![]() 时表示第 i 个先验框与第 j 个ground truth匹配,并且ground truth的类别为 p 。c为类别置信度预测值。l 为先验框的所对应边界框的位置预测值,而 g 是ground truth的位置参数。对于位置误差,其采用Smooth L1 loss,定义如下:
时表示第 i 个先验框与第 j 个ground truth匹配,并且ground truth的类别为 p 。c为类别置信度预测值。l 为先验框的所对应边界框的位置预测值,而 g 是ground truth的位置参数。对于位置误差,其采用Smooth L1 loss,定义如下:
由于 ![]() 的存在,所以位置误差仅针对正样本进行计算。值得注意的是,要先对ground truth的 g 进行编码得到
的存在,所以位置误差仅针对正样本进行计算。值得注意的是,要先对ground truth的 g 进行编码得到 ![]() ,因为预测值 l 也是编码值,若设置variance_encoded_in_target=True,编码时要加上variance:
,因为预测值 l 也是编码值,若设置variance_encoded_in_target=True,编码时要加上variance:
对于置信度误差,其采用softmax loss:
权重系数  通过交叉验证设置为1。前一半是针对正样本的loss计算,后一半是针对负样本的loss计算。
通过交叉验证设置为1。前一半是针对正样本的loss计算,后一半是针对负样本的loss计算。
(3)数据扩增
- Use the entire original input image
- Sample a patch so that the minimum jaccard overlap with the objects is 0.1, 0.3, 0.5, 0.7, or 0.9.
- Randomly sample a patch.
抽样得到的patch大小约占原图大小的[0.1,1],这些patch的纵横比为0.5和2。如果gt的中心位于抽样的patch中间,则我们将该gt完整的保留。
对于原图和抽样得到的patch,以p=0.5的概率进行水平翻转,并施加光度变换进行数据增强。
总结如下:
采用数据扩增(Data Augmentation)可以提升SSD的性能,主要采用的技术有水平翻转(horizontal flip),随机裁剪加颜色扭曲(random crop & color distortion),随机采集块域(Randomly sample a patch)(获取小目标训练样本),如下图所示:

五.预测过程
预测过程比较简单,对于每个预测框,首先根据类别置信度确定其类别(置信度最大者)与置信度值,并过滤掉属于背景的预测框。然后根据置信度阈值(如0.5)过滤掉阈值较低的预测框。对于留下的预测框进行解码,根据先验框得到其真实的位置参数(解码后一般还需要做clip,防止预测框位置超出图片)。解码之后,一般需要根据置信度进行降序排列,然后仅保留top-k(如400)个预测框。最后就是进行NMS算法,过滤掉那些重叠度较大的预测框。最后剩余的预测框就是检测结果了。
总结如下:
- 对于每一个预测框根据类别置信度值确定其预测的类别与置信度
- 过滤掉属于背景的预测框
- 过滤掉置信度值小于一定阈值的预测框(如<0.5)
- 根据先验框得到剩余预测框真实的位置参数bx,by,bw,bh(做clip防止预测框位置超出图片)
- 根据置信度进行降序排序,得到top-k个预测框,如400个
- 对每一个类别分别进行nms,剩余的预测框即为预测结果。
六.模型分析

1.Data augmentation is crucial
2.More default box shapes is better.
3.Atrous is faster
4.Multiple output layers at different resolutions is better