数字图像处理之均值滤波
图像噪声,通常指图像中除了成像物体之外的其它信息,比如斑点和颗粒,这些额外的错误信息干扰了成像物体的显示,影响成像质量,所以往往需要通过图像滤波(也称为图像去噪)来消除这些噪点。常见的图像滤波算法有均值滤波、高斯滤波、中值滤波、双边滤波、非局部均值滤波,以及近几年火热的基于深度学习的图像滤波等。本章节将详细讲解均值滤波算法的原理,以及C++实现和优化。
首先膜拜一下那些写Opencv代码的大佬们,他们写的代码不仅稳定性良好,运行效率也超级高,很多时候我们费尽心思写了一个相同的算法,发现性能与Opencv的接口函数相比还是差了许多,所以会有一丢丢的心理落差,但是抱着学习的态度,追赶大佬的脚步,精益求精,相信我们自己也是可以的!
均值滤波,也就是计算每一个像素点周围像素点(包括该点)的平均值,作为该像素点滤波之后的值,通常取以该像素点为中心的矩形窗口内的所有像素点来计算平均值,矩形窗口的大小一般为3*3,5*5,9*9,...,(2n+1)*(2n+1)。窗口越大,滤波效果越好,但是图像也变得更加模糊,所以需要根据实际情况设置矩形窗口的大小。比如3*3窗口的均值滤波如下图所示,点(x,y)的滤波值由其周围9个点(包括其自身)计算平均值得到。
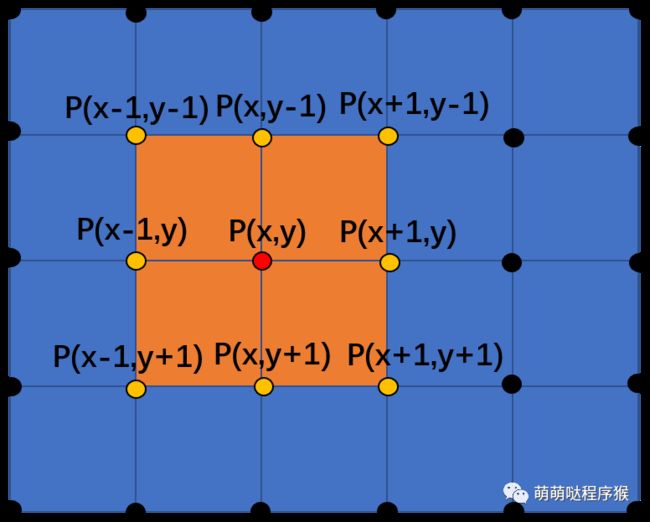
上图中点(x,y)的滤波值用公式表示为:
对于(2n+1)*(2n+1)窗口,点(x,y)的平均滤波值可根据如下公式计算:
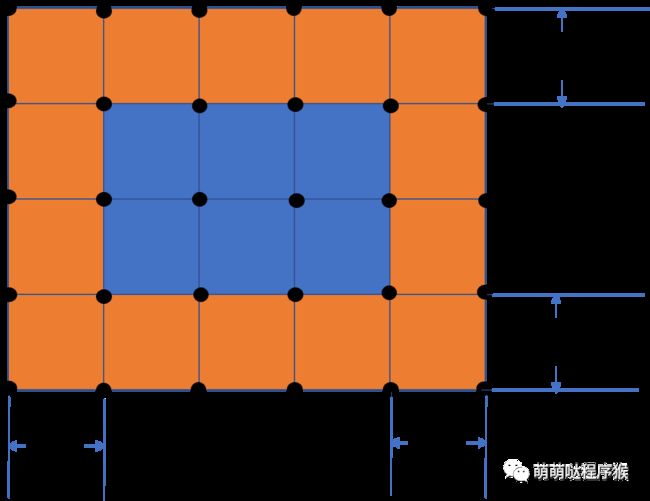
为了解决图像边缘像素点取不到完整矩形窗口的问题,通常先把图像的上、下边界扩充n行,左右边界扩充n列,实际计算时,只计算图像原有像素点的窗口平均值。比如当矩形窗口为3*3,则n的值为1,这种情况下扩充边界的示意图如下图所示:
根据以上原理,基于Opencv和C++的均值滤波实现代码如下:
void blur_mean(Mat src, Mat &dst, int winsize)
{
if(winsize&1) //如果窗口的边不是奇数,则加1使其为奇数,因为只有窗口的边为奇数的时候当前像素点才是窗口的中心点
{
winsize += 1;
}
const int winsize_2 = winsize/2; //winsize_2 就是上述公式中的n
const float winsize_num = winsize*winsize; //(2n+1)*(2n+1)
Mat src_board;
//调用Opencv的copyMakeBorder函数扩充边界
copyMakeBorder(src, src_board, winsize_2, winsize_2, winsize_2, winsize_2, BORDER_REFLECT);
const int row = src_board.rows; //行
const int col = src_board.cols;
Mat dst_tmp(src.size(), CV_8UC1); //列
for(int i = winsize_2; i < row-winsize_2; i++) //行循环,只计算图像的原有行
{
for(int j = winsize_2; j < col-winsize_2; j++) //列循环,只计算图像的原有列
{
float sum = 0.0;
//计算每一个像素点周围矩形区域内所有像素点的累加和
for(int y = 0; y < winsize; y++)
{
for(int x = 0; x < winsize; x++)
{
sum += src_board.ptr(i-winsize_2+y)[j-winsize_2+x];
}
}
//求得累加和之后再求窗口像素的平均值。作为当前像素点的滤波值
dst_tmp.ptr(i-winsize_2)[j-winsize_2] = (uchar)(sum/winsize_num + 0.5);
}
}
dst_tmp.copyTo(dst);
}
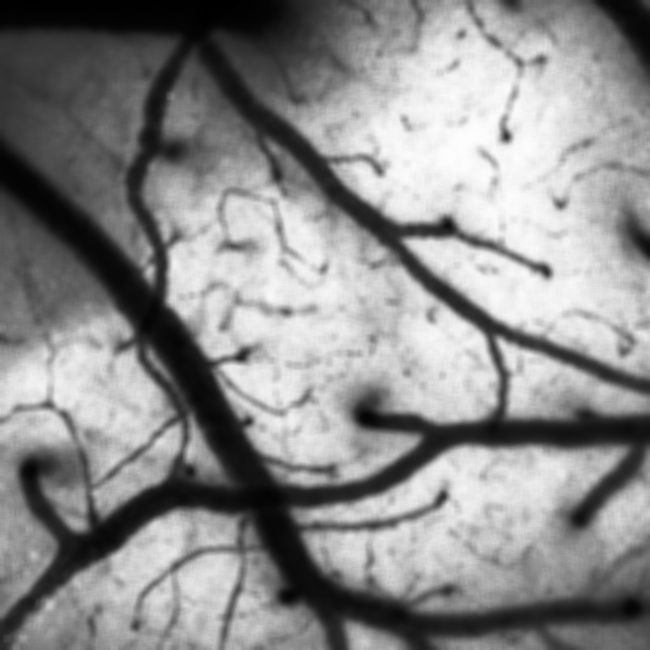
运行以上代码,对一帧1024*1024的图像进行均值滤波,得到的结果如下图所示。可以看到,随着窗口尺寸的增加,滤波图像变得更加模糊,整体耗时也大幅度增加,由此可以判断在滤波的计算过程中,主要耗时点为计算窗口内像素点的累加和。
原图
3*3窗口,耗时17 ms
11*11窗口,耗时147.8 ms
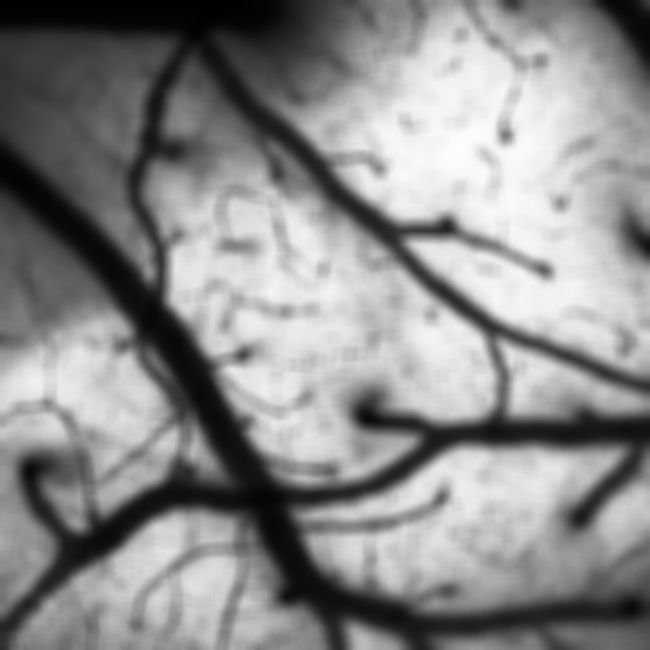
21*21窗口,耗时535.4 ms
前面两篇文章中主要讲解了积分图的计算,根据积分图的特点,可以使用积分图来简化矩形窗口内像素累加和的计算,如下图所示,蓝色矩形区域内点的像素累加和,可以使用其四个顶点A、B、C、D的积分值来计算。
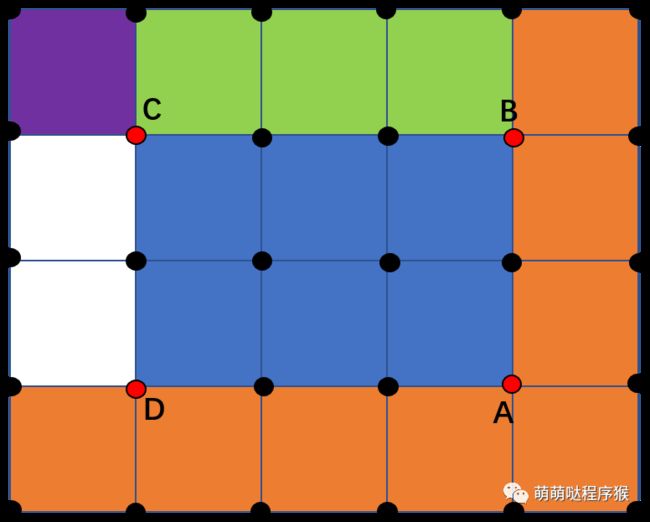
假设A、B、C、D的积分值分别为I(A)、I(B)、I(C)、I(D),那么蓝色区域的像素累加和可以按照下式计算:
![]()
将上述积分图计算矩形区域内像素和的原理应用于均值滤波中,可以大大简化运算。对于每一个像素点,其计算滤波值的计算量由原本的(2n+1)*(2n+1)次加法,简化为2次加法和1次减法。
使用积分图优化加速的均值滤波代码如下:
void blur_mean_integral(Mat src, Mat &dst, int winsize)
{
if(winsize&1)
{
winsize += 1;
}
const int winsize_2 = winsize/2;
const float winsize_num = 1.0/(winsize*winsize);
Mat src_board;
copyMakeBorder(src, src_board, winsize_2, winsize_2, winsize_2, winsize_2, BORDER_REFLECT);
Mat integral;
Integal_row(src_board, integral); //计算积分图
const int row = src_board.rows;
const int col = src_board.cols;
dst.create(src.size(), CV_8UC1);
for(int i = winsize_2; i < row-winsize_2; i++)
{
for(int j = winsize_2; j < col-winsize_2; j++)
{
//使用矩形区域四个顶点的积分值来计算区域内的x像素累加和
float sum = integral.ptr(i+winsize_2)[j+winsize_2] - integral.ptr(i-winsize_2)[j+winsize_2]
- integral.ptr(i+winsize_2)[j-winsize_2] + integral.ptr(i-winsize_2)[j-winsize_2];
//得到累加和之后再计算平均值
dst.ptr(i-winsize_2)[j-winsize_2] = (uchar)(sum*winsize_num + 0.5);
}
}
}
运行以上代码,取窗口大小为21*21,同样对一帧1024*1024的图像进行均值滤波,耗时由535.4 ms减小到6.78 ms,可以看到,整体耗时大大减小。在使用积分图的基础上,再进行SSE指令的优化,可以进一步减小计算耗时:
void blur_mean_integral(Mat src, Mat &dst, int winsize)
{
if(winsize&1)
{
winsize += 1;
}
const int winsize_2 = winsize/2;
const float winsize_num = 1.0/(winsize*winsize);
Mat src_board;
copyMakeBorder(src, src_board, winsize_2, winsize_2, winsize_2, winsize_2, BORDER_REFLECT);
Mat integral;
Integal_row(src_board, integral);
const int row = src_board.rows;
const int col = src_board.cols;
dst.create(src.size(), CV_8UC1);
for(int i = winsize_2; i < row-winsize_2; i++)
{
float *p1 = integral.ptr(i-winsize_2);
float *p2 = integral.ptr(i+winsize_2);
uchar *p3 = dst.ptr(i-winsize_2);
int j = winsize_2;
for(; j < col-winsize_2-4; j+=4) //列循环按4列展开,即每次循环同时计算4个点的滤波值
{
/*float sum = p2[j+winsize_2] - p1[j+winsize_2] - p2[j-winsize_2] + p1[j-winsize_2];
p3[j-winsize_2] = (uchar)(sum*winsize_num + 0.5);
sum = p2[j+winsize_2+1] - p1[j+winsize_2+1] - p2[j-winsize_2+1] + p1[j-winsize_2+1];
p3[j-winsize_2+1] = (uchar)(sum*winsize_num + 0.5);
sum = p2[j+winsize_2+2] - p1[j+winsize_2+2] - p2[j-winsize_2+2] + p1[j-winsize_2+2];
p3[j-winsize_2+2] = (uchar)(sum*winsize_num + 0.5);
sum = p2[j+winsize_2+3] - p1[j+winsize_2+3] - p2[j-winsize_2+3] + p1[j-winsize_2+3];
p3[j-winsize_2+3] = (uchar)(sum*winsize_num + 0.5);*/
//以下的SSE指令代码对应上方的C++代码
__m128 a3, a2, a1, a0;
//将4个点的同一方向顶点的像素值加载到__m128变量中
//a3 : p2[j+winsize_2+3] p2[j+winsize_2+2] p2[j+winsize_2+1] p2[j+winsize_2]
//a2 : p1[j+winsize_2+3] p1[j+winsize_2+2] p1[j+winsize_2+1] p1[j+winsize_2]
//a1 : p2[j-winsize_2+3] p2[j-winsize_2+2] p2[j-winsize_2+1] p2[j-winsize_2]
//a0 : p1[j-winsize_2+3] p1[j-winsize_2+2] p1[j-winsize_2+1] p1[j-winsize_2]
a3 = _mm_loadu_ps(&p2[j+winsize_2]);
a2 = _mm_loadu_ps(&p1[j+winsize_2]);
a1 = _mm_loadu_ps(&p2[j-winsize_2]);
a0 = _mm_loadu_ps(&p1[j-winsize_2]);
//(a3-a2)+(a0-a1)
__m128 sum = _mm_add_ps(_mm_sub_ps(a3, a2), _mm_sub_ps(a0, a1));
__m128 winnum = _mm_set1_ps(winsize_num); //winsize_num winsize_num winsize_num winsize_num
sum = _mm_mul_ps(sum, winnum); //sum中有4个浮点数,winnum中也有4个浮点数,两者对应位置的浮点数相乘
__m128i sum_i = _mm_cvtps_epi32(sum); //四舍五入取整
p3[j-winsize_2+3] = (uchar)sum_i.m128i_i32[3];
p3[j-winsize_2+2] = (uchar)sum_i.m128i_i32[2];
p3[j-winsize_2+1] = (uchar)sum_i.m128i_i32[1];
p3[j-winsize_2] = (uchar)sum_i.m128i_i32[0];
}
for(; j < col-winsize_2; j++)
{
float sum = p2[j+winsize_2] - p1[j+winsize_2] - p2[j-winsize_2] + p1[j-winsize_2];
p3[j-winsize_2] = (uchar)(sum*winsize_num + 0.5);
}
}
}
使用SSE指令优化之后,同样对1024*1024的图像,取窗口21*21进行滤波,耗时由6.78 ms减少到3.98 ms。由此可知还是有一定优化效果的。