基于Darknet和Darknet-ROS在Jetson Nano部署yolov3 tiny,进行口罩佩戴检测
单独运行yolov3-tiy进行目标检测
下载Darknet源码并编译
https://gitee.com/bingda-robot/darknet.git
或者上传本地的darknet源码至Jetson Nano
scp -r /Users/xiangjun/Desktop/ros/darknet [email protected]:/home/bingda
验证cuda是否安装:
ls -l /usr/local |grep cuda
查看opencv的版本:
opencv_version
查看opencv的库文件:
ls -l /usr/include |grep opencv
创建opencv4的软链接:
sudo ln -s /usr/include/opencv4/ /usr/include/opencv
开始编译darknet:
cd darknet
make
测试darknet
测试方式一
./darknet imtest data/eagle.jpg
出现如图结果则表示安装运行成功!
测试方式二
如果通过命令行方式登陆进Jetson Nano,则运行目标检测命令:
./darknet detector test cfg/coco.data cfg/yolov3-tiny.cfg ./yolov3-tiny.weights data/dog.jpg
其中yolov3-tiny权重文件下载:
wget https://pjreddie.com/media/files/yolov3-tiny.weights
yolo系列的权重文件下载地址:
https://pjreddie.com/darknet/yolo/
测试方式三:
摄像头视频测试
./darknet detector demo cfg/coco.data cfg/yolov3-tiny.cfg ./yolov3-tiny.weights
查看内存消耗情况:
free
配置kou罩检测相关文件,计算MAP值:
./darknet detector map /home/bingda/facemask/darknet/facemask/train/facemask.data /home/bingda/facemask/darknet/facemask/train/yolov3-tiny-facemask.cfg /home/bingda/facemask/darknet/facemask/output/weights/pre/yolov3-tiny-facemask_80000.weights
使用Darknet yolov3-tiny 在ros机器人上进行目标检测
下载源码并编译
git clone https://gitee.com/bingda-robot/darknet_ros.git
或将源码上传至ROS机器人
scp -r /Users/xiangjun/Desktop/ros/darknet_ros [email protected]:/home/bingda
创建软链接
cd darknet_ros
ln -s ~/darknet ~/catkin_ws/src/darknet_ros/darknet
回到工作空间下编译项目:
catkin_make
复制权重文件至ros功能包下:
cp -r ~/darknet/yolov3-tiny.weights /home/bingda/catkin_ws/src/darknet_ros/darknet_ros/yolo_network_config/weights
启动功能包,进行目标检测:
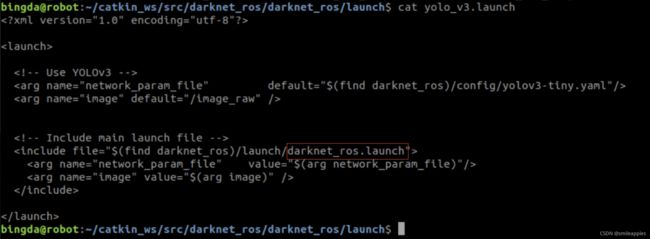
roslaunch darknet_ros yolo_v3.launch
启动图像话题提供检测数据:
roslaunch robot_vision robot_camera.launch
darknet_ros功能包相关配置文件分析:
启用ros功能包进行目标检测命令:
roslaunch darknet_ros yolo_v3.launch
yolov3-tiny的权重文件位置:

网络配置文件
数据配置文件:
数据配置文件的路径:

数据配置文件内容:
启动文件相互包含关系为:
替换权重文件:
修改数据配置问价内容:yolov3-tiny.yaml
运行出现如下错误:

记得替换cfg网络配置文件,替换后模型就能正常运行,只是对人脸识别的要靠近摄像头!