人脸检测:MTCNN人脸及特征点检测--NCNN优化
本文主要讲述当你拿到MTCNN的caffemodel后,如何使用它对一张图里的人脸进行检测和特征点标定。
相当于一个代码实现的解释。因为最近卤煮在用ncnn,所以该代码也是基于ncnn架构做的。 caffe架构同理
如果你对MTCNN这篇论文还不熟悉,建议先去看原理。
MTCNN解读:Joint Face Detection and Alignment using Multi-task Cascaded Convolutional Networks
1. MTCNN关键参数
nms_threshold:非极大值抑制nms筛选人脸框时的IOU阈值,三个网络可单独设定阈值,值设置的过小,nms合并的少,会产生较多冗余计算。示例nms_threshold[3] = { 0.5, 0.7, 0.7 };。
threshold:人脸框得分阈值,三个网络可单独设定阈值,值设置的太小,会有很多框通过,也就增加了计算量,还有可能导致最后不是人脸的框错认为人脸。示例threshold[3] = {0.8, 0.8, 0.8};
minsize :最小可检测图像,该值大小,可控制图像金字塔的阶层数的参数之一,越小,阶层越多,计算越多。示例minsize = 40;
factor :生成图像金字塔时候的缩放系数, 范围(0,1),可控制图像金字塔的阶层数的参数之一,越大,阶层越多,计算越多。示例factor = 0.709;
输入图片的尺寸,minsize和factor共同影响了图像金字塔的阶层数。用户可根据自己的精度需求进行调控。
MTCNN整体过程只管图示如下:

接下来对使用过程进行详细说明:
2. 生成图像金字塔
前面提到,输入图片的尺寸,minsize和factor共同影响了图像金字塔的阶层数。也就是说决定能够生成多少张图。
缩放后的尺寸minL=org_L*(12/minisize)*factor^(n),n={0,1,2,3,...,N},缩放尺寸最小不能小于12,也就是缩放到12为止。n的数量也就是能够缩放出图片的数量。看到上面这个公式应该就明白为啥那三个参数能够影响阶层数了吧。
3. Pnet运算
一般Pnet只做检测和人脸框回归两个任务。忽略下图中的Facial landmark。

虽然网络定义的时候input的size是12*12*3,由于Pnet只有卷积层,我们可以直接将resize后的图像喂给网络进行前传,只是得到的结果就不是1*1*2和1*1*4,而是m*m*2和m*m*4了。这样就不用先从resize的图上截取各种12*12*3的图再送入网络了,而是一次性送入,再根据结果回推每个结果对应的12*12的图在输入图片的什么位置。
针对金字塔中每张图,网络forward计算后都得到了人脸得分以及人脸框回归的结果。人脸分类得分是两个通道的三维矩阵m*m*2,其实对应在网络输入图片上m*m个12*12的滑框,结合当前图片在金字塔图片中的缩放scale,可以推算出每个滑框在原始图像中的具体坐标。
首先要根据得分进行筛选,得分低于阈值的滑框,排除。
然后利用nms非极大值抑制,对剩下的滑框进行合并。nms具体解释,可以参照我上一篇博客:NMS非极大值抑制:用擂台赛带你从原理到代码脑洞大开恍然大悟
当金字塔中所有图片处理完后,再利用nms对汇总的滑框进行合并,然后利用最后剩余的滑框对应的Bbox结果转换成原始图像中像素坐标,也就是得到了人脸框的坐标。所以,Pnet最终能够得到了一批人脸框。
3. Rnet
Rnet仍然只做检测和人脸框回归两个任务。忽略下图中的Facial landmark。
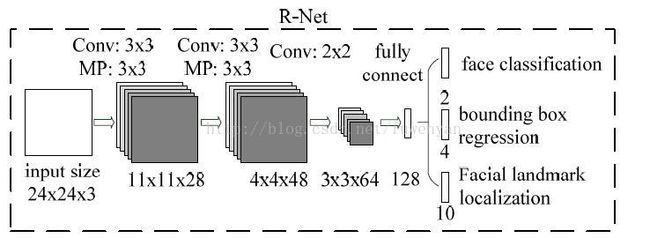
Rnet的作用是对Pnet得到的人脸框进一步打分筛选,回归人脸框。
将Pnet运算出来的人脸框从原图上截取下来,并且resize到24*24*3,作为Rnet的输入。输出仍然是得分和BBox回归结果。
对得分低于阈值的候选框进行抛弃,剩下的候选框做nms进行合并,然后再将BBox回归结果映射到原始图像的像素坐标上。
所以,Rnet最终得到的是在Pnet结果中精选出来的人脸框。
4. Onet
Onet将检测,人脸框回归和特征点定位,一起做了。
Onet的作用是对Rnet得到的人脸框进一步打分筛选,回归人脸框。同时在每个框上都计算特征点位置。
将Rnet运算出来的人脸框从原图上截取下来,并且resize到48*48*3,作为Onet的输入。输出是得分,BBox回归结果以及landmark位置数据。
分数超过阈值的候选框对应的Bbox回归数据以及landmark数据进行保存。
将Bbox回归数据以及landmark数据映射到原始图像坐标上。
再次实施nms对人脸框进行合并。
经过这层层筛选合并后,最终剩下的Bbox以及其对应的landmark就是我们苦苦追求的结果了。
下面附上代码:(代码以https://github.com/ElegantGod/ncnn/tree/master/mtcnn为base,卤煮在上面做了很多注释以及稍许修改,以助于理解)
#include
#include
#include
#include
#include
#include
#include
#include
#include "net.h"
#include"cpu.h"
using namespace std;
using namespace cv;
struct Bbox
{
float score;
int x1;
int y1;
int x2;
int y2;
float area;
bool exist;
float ppoint[10];
float regreCoord[4];
};
struct orderScore
{
float score;
int oriOrder;
};
void resize_image(ncnn::Mat& srcImage, ncnn::Mat& dstImage)
{
int src_width = srcImage.w;
int src_height = srcImage.h;
int src_channel = srcImage.c;
int dst_width = dstImage.w;
int dst_height = dstImage.h;
int dst_channel = dstImage.c;
if (src_width == dst_width && src_height == dst_height)
{
memcpy(dstImage.data, srcImage.data, src_width*src_height*src_channel*sizeof(float));
return;
}
float lf_x_scl = static_cast(src_width) / dst_width;
float lf_y_Scl = static_cast(src_height) / dst_height;
const float* src_data = srcImage.data;
float* dest_data = dstImage.data;
int src_area = srcImage.cstep;
int src_area2 = 2 * src_area;
int dst_area = dstImage.cstep;
int dst_area2 = 2 * dst_area;
for (int y = 0; y < dst_height; y++) {
for (int x = 0; x < dst_width; x++) {
float lf_x_s = lf_x_scl * x;
float lf_y_s = lf_y_Scl * y;
int n_x_s = static_cast(lf_x_s);
n_x_s = (n_x_s <= (src_width - 2) ? n_x_s : (src_width - 2));
int n_y_s = static_cast(lf_y_s);
n_y_s = (n_y_s <= (src_height - 2) ? n_y_s : (src_height - 2));
float lf_weight_x = lf_x_s - n_x_s;
float lf_weight_y = lf_y_s - n_y_s;
float dest_val_b = (1 - lf_weight_y) * ((1 - lf_weight_x) *
src_data[n_y_s * src_width + n_x_s] +
lf_weight_x * src_data[n_y_s * src_width + n_x_s + 1]) +
lf_weight_y * ((1 - lf_weight_x) * src_data[(n_y_s + 1) * src_width + n_x_s] +
lf_weight_x * src_data[(n_y_s + 1) * src_width + n_x_s + 1]);
float dest_val_g = (1 - lf_weight_y) * ((1 - lf_weight_x) *
src_data[n_y_s * src_width + n_x_s + src_area] +
lf_weight_x * src_data[n_y_s * src_width + n_x_s + 1 + src_area]) +
lf_weight_y * ((1 - lf_weight_x) * src_data[(n_y_s + 1) * src_width + n_x_s + src_area] +
lf_weight_x * src_data[(n_y_s + 1) * src_width + n_x_s + 1 + src_area]);
float dest_val_r = (1 - lf_weight_y) * ((1 - lf_weight_x) *
src_data[n_y_s * src_width + n_x_s + src_area2] +
lf_weight_x * src_data[n_y_s * src_width + n_x_s + 1 + src_area2]) +
lf_weight_y * ((1 - lf_weight_x) * src_data[(n_y_s + 1) * src_width + n_x_s + src_area2] +
lf_weight_x * src_data[(n_y_s + 1) * src_width + n_x_s + 1 + src_area2]);
dest_data[y * dst_width + x] = static_cast(dest_val_b);
dest_data[y * dst_width + x + dst_area] = static_cast(dest_val_g);
dest_data[y * dst_width + x + 2 * dst_area] = static_cast (dest_val_r);
}
}
}
bool cmpScore(orderScore lsh, orderScore rsh){
if(lsh.score& finalBbox);
cv::Mat cp_img;
private:
void generateBbox(ncnn::Mat score, ncnn::Mat location, vector& boundingBox_, vector& bboxScore_, float scale);
void nms(vector &boundingBox_, std::vector &bboxScore_, const float overlap_threshold, string modelname="Union");
void refineAndSquareBbox(vector &vecBbox, const int &height, const int &width);
ncnn::Net Pnet, Rnet, Onet;
ncnn::Mat img;
float nms_threshold[3];// = { 0.5, 0.7, 0.7 };
float threshold[3];// = {0.8, 0.8, 0.8};
float mean_vals[3];// = {127.5, 127.5, 127.5};
float norm_vals[3];// = {0.0078125, 0.0078125, 0.0078125};
std::vector firstBbox_, secondBbox_,thirdBbox_;
std::vector firstOrderScore_, secondBboxScore_, thirdBboxScore_;
int img_w, img_h;
};
mtcnn::mtcnn(){
for (int i = 0; i < 3; i++)
{
nms_threshold[i]=0.7;// = { 0.5, 0.7, 0.7 };
threshold[i]=0.7;// = {0.8, 0.8, 0.8};
mean_vals[i]=127.5;// = {127.5, 127.5, 127.5};
norm_vals[i]=0.0078125;// = {0.0078125, 0.0078125, 0.0078125};
}
nms_threshold[0] = 0.5;
Pnet.load_param("E:/Algrithm/MTCNN/MTCNN-master/mtcnn_caffe/model/det1.param");
Pnet.load_model("E:/Algrithm/MTCNN/MTCNN-master/mtcnn_caffe/model/det1.bin");
Rnet.load_param("E:/Algrithm/MTCNN/MTCNN-master/mtcnn_caffe/model/det2.param");
Rnet.load_model("E:/Algrithm/MTCNN/MTCNN-master/mtcnn_caffe/model/det2.bin");
Onet.load_param("E:/Algrithm/MTCNN/MTCNN-master/mtcnn_caffe/model/det3.param");
Onet.load_model("E:/Algrithm/MTCNN/MTCNN-master/mtcnn_caffe/model/det3.bin");
//cp_img.create(295, 413, CV_8UC3);
//const char* imagepath = "E:/Algrithm/ncnn/ncnn/x64/Release/test3.jpg";// argv[1];
//cp_img = cv::imread(imagepath);
}
/******************generateBbox******************************/
//根据Pnet的输出结果,由滑框的得分,筛选可能是人脸的滑框,并记录该框的位置、人脸坐标信息、得分以及编号
void mtcnn::generateBbox(ncnn::Mat score, ncnn::Mat location, std::vector& boundingBox_, std::vector& bboxScore_, float scale){
int stride = 2;//Pnet中有一次MP2*2,后续转换的时候相当于stride=2;
int cellsize = 12;
int count = 0;
//score p
float *p = score.channel(1);//score.data + score.cstep;//判定为人脸的概率
//float *plocal = location.data;
Bbox bbox;
orderScore order;
// float max_p = 0;
for(int row=0;rowmax_p)
//{
// max_p = *p;
//}
if(*p>threshold[0]){
bbox.score = *p;//记录得分
order.score = *p;
order.oriOrder = count;//记录有效滑框的编号
bbox.x1 = round((stride*col+1)/scale);//12*12的滑框,换算到原始图像上的坐标
bbox.y1 = round((stride*row+1)/scale);
bbox.x2 = round((stride*col+1+cellsize)/scale);
bbox.y2 = round((stride*row+1+cellsize)/scale);
bbox.exist = true;
bbox.area = (bbox.x2 - bbox.x1)*(bbox.y2 - bbox.y1);
for(int channel=0;channel<4;channel++)
bbox.regreCoord[channel]=location.channel(channel)[0];//人脸框的坐标相关值
boundingBox_.push_back(bbox);
bboxScore_.push_back(order);
count++;
}
p++;
//plocal++;
}
}
//printf("Pnet max prob: %f\n",max_p);
}
/**********************nms非极大值抑制****************************/
void mtcnn::nms(std::vector &boundingBox_, std::vector &bboxScore_, const float overlap_threshold, string modelname){
if(boundingBox_.empty()){
return;
}
std::vector heros;
//sort the score
sort(bboxScore_.begin(), bboxScore_.end(), cmpScore);//cmpScore指定升序排列
int order = 0;
float IOU = 0;
float maxX = 0;
float maxY = 0;
float minX = 0;
float minY = 0;
//规则,站上擂台的擂台主,永远都是胜利者。
while(bboxScore_.size()>0){
order = bboxScore_.back().oriOrder;//取得分最高勇士的编号ID。
bboxScore_.pop_back();//勇士出列
if(order<0)continue;//死的?下一个!(order在(*it).oriOrder = -1;改变)
heros.push_back(order);//记录擂台主ID
boundingBox_.at(order).exist = false;//当前这个Bbox为擂台主,签订生死簿。
for(int num=0;numboundingBox_.at(order).x1)?boundingBox_.at(num).x1:boundingBox_.at(order).x1;
maxY = (boundingBox_.at(num).y1>boundingBox_.at(order).y1)?boundingBox_.at(num).y1:boundingBox_.at(order).y1;
minX = (boundingBox_.at(num).x20)?(minX-maxX+1):0;
maxY = ((minY-maxY+1)>0)?(minY-maxY+1):0;
//IOU reuse for the area of two bbox
IOU = maxX * maxY;
if(!modelname.compare("Union"))
IOU = IOU/(boundingBox_.at(num).area + boundingBox_.at(order).area - IOU);
else if(!modelname.compare("Min")){
IOU = IOU/((boundingBox_.at(num).areaoverlap_threshold){
boundingBox_.at(num).exist=false;//如果该对比框与擂台主的IOU够大,挑战者勇士战死
for(vector::iterator it=bboxScore_.begin(); it!=bboxScore_.end();it++){
if((*it).oriOrder == num) {
(*it).oriOrder = -1;//勇士战死标志
break;
}
}
}//else 那些距离擂台主比较远迎战者幸免于难,将有机会作为擂台主出现
}
}
}
for(int i=0;i &vecBbox, const int &height, const int &width){
if(vecBbox.empty()){
cout<<"Bbox is empty!!"<::iterator it=vecBbox.begin(); it!=vecBbox.end();it++){
if((*it).exist){
bbw = (*it).x2 - (*it).x1 + 1;//滑框的宽高计算
bbh = (*it).y2 - (*it).y1 + 1;
x1 = (*it).x1 + (*it).regreCoord[0]*bbw;//人脸框的位置坐标计算
y1 = (*it).y1 + (*it).regreCoord[1]*bbh;
x2 = (*it).x2 + (*it).regreCoord[2]*bbw;
y2 = (*it).y2 + (*it).regreCoord[3]*bbh;
w = x2 - x1 + 1;//人脸框宽高
h = y2 - y1 + 1;
maxSide = (h>w)?h:w;
x1 = x1 + w*0.5 - maxSide*0.5;
y1 = y1 + h*0.5 - maxSide*0.5;
(*it).x2 = round(x1 + maxSide - 1);
(*it).y2 = round(y1 + maxSide - 1);
(*it).x1 = round(x1);
(*it).y1 = round(y1);
//boundary check
if((*it).x1<0)(*it).x1=0;
if((*it).y1<0)(*it).y1=0;
if((*it).x2>width)(*it).x2 = width - 1;
if((*it).y2>height)(*it).y2 = height - 1;
it->area = (it->x2 - it->x1)*(it->y2 - it->y1);
}
}
}
void mtcnn::detect(ncnn::Mat& img_, std::vector& finalBbox_){
img = img_;
img_w = img.w;
img_h = img.h;
img.substract_mean_normalize(mean_vals, norm_vals);//数据预处理,归一化至(-1,1)
float minl = img_w scales_;
while(minl>MIN_DET_SIZE){
if (factor_count > 0){ m = m*factor; }
scales_.push_back(m);
minl *= factor;
factor_count++;
}
orderScore order;
int count = 0;
for (size_t i = 0; i < scales_.size(); i++) {
int hs = (int)ceil(img_h*scales_[i]);
int ws = (int)ceil(img_w*scales_[i]);
ncnn::Mat in(ws, hs, 3);
resize_image(img, in);//一次次生成图像金字塔中的一层图
ncnn::Extractor ex = Pnet.create_extractor();
ex.set_light_mode(true);
printf("Pnet input width:%d, height:%d, channel:%d\n",in.w,in.h,in.c);
ex.input("data", in);//Pnet只有卷积层,所以可以接受不同size的input
ncnn::Mat score_, location_;
ex.extract("prob1", score_);
printf("prob1 w:%d, h:%d, ch:%d, first data:%f\n", score_.w, score_.h, score_.c, score_.data[0]);
//for (int t_w = 0; t_w < score_.w*score_.h*score_.c; t_w++)
//{
// printf("%f, ", score_.data[t_w]);
//}
ex.extract("conv4-2", location_);
std::vector boundingBox_;
std::vector bboxScore_;
generateBbox(score_, location_, boundingBox_, bboxScore_, scales_[i]);
nms(boundingBox_, bboxScore_, nms_threshold[0]);//分会场擂台赛
for(vector::iterator it=boundingBox_.begin(); it!=boundingBox_.end();it++){
if((*it).exist){//获胜擂台主得到进入主会场的机会
firstBbox_.push_back(*it);//主会场花名册
order.score = (*it).score;
order.oriOrder = count;
firstOrderScore_.push_back(order);
count++;
}
}
bboxScore_.clear();
boundingBox_.clear();
}
//the first stage's nms
if(count<1)return;
nms(firstBbox_, firstOrderScore_, nms_threshold[0]);//主会场擂台赛
refineAndSquareBbox(firstBbox_, img_h, img_w);
printf("firstBbox_.size()=%d\n", firstBbox_.size());
//for (vector::iterator it = firstBbox_.begin(); it != firstBbox_.end(); it++)
//{
// cout << "OK" << endl;
// //rectangle(cp_img, Point((*it).x1, (*it).y1), Point((*it).x2, (*it).y2), Scalar(0, 0, 255), 2, 8, 0);
//}
//imshow("Pnet.jpg", cp_img);
//waitKey(1000);
//second stage
count = 0;
for(vector::iterator it=firstBbox_.begin(); it!=firstBbox_.end();it++){
if((*it).exist){
ncnn::Mat tempIm;
copy_cut_border(img, tempIm, (*it).y1, img_h-(*it).y2, (*it).x1, img_w-(*it).x2);
ncnn::Mat in(24, 24, 3);
resize_image(tempIm, in);
ncnn::Extractor ex = Rnet.create_extractor();
ex.set_light_mode(true);
ex.input("data", in);
ncnn::Mat score, bbox;
ex.extract("prob1", score);
ex.extract("conv5-2", bbox);
if(*(score.data+score.cstep)>threshold[1]){
for(int channel=0;channel<4;channel++)
it->regreCoord[channel]=bbox.channel(channel)[0];//*(bbox.data+channel*bbox.cstep);
it->area = (it->x2 - it->x1)*(it->y2 - it->y1);
it->score = score.channel(1)[0];//*(score.data+score.cstep);
secondBbox_.push_back(*it);
order.score = it->score;
order.oriOrder = count++;
secondBboxScore_.push_back(order);
}
else{
(*it).exist=false;
}
}
}
printf("secondBbox_.size()=%d\n", secondBbox_.size());
if(count<1)return;
nms(secondBbox_, secondBboxScore_, nms_threshold[1]);
refineAndSquareBbox(secondBbox_, img_h, img_w);
//third stage
count = 0;
for(vector::iterator it=secondBbox_.begin(); it!=secondBbox_.end();it++){
if((*it).exist){
ncnn::Mat tempIm;
copy_cut_border(img, tempIm, (*it).y1, img_h-(*it).y2, (*it).x1, img_w-(*it).x2);
ncnn::Mat in(48, 48, 3);
resize_image(tempIm, in);
ncnn::Extractor ex = Onet.create_extractor();
ex.set_light_mode(true);
ex.input("data", in);
ncnn::Mat score, bbox, keyPoint;
ex.extract("prob1", score);
ex.extract("conv6-2", bbox);
ex.extract("conv6-3", keyPoint);
if(score.channel(1)[0]>threshold[2]){
for(int channel=0;channel<4;channel++)
it->regreCoord[channel]=bbox.channel(channel)[0];
it->area = (it->x2 - it->x1)*(it->y2 - it->y1);
it->score = score.channel(1)[0];
for(int num=0;num<5;num++){
(it->ppoint)[num] = it->x1 + (it->x2 - it->x1)*keyPoint.channel(num)[0];
(it->ppoint)[num+5] = it->y1 + (it->y2 - it->y1)*keyPoint.channel(num+5)[0];
}
thirdBbox_.push_back(*it);
order.score = it->score;
order.oriOrder = count++;
thirdBboxScore_.push_back(order);
}
else
(*it).exist=false;
}
}
printf("thirdBbox_.size()=%d\n", thirdBbox_.size());
if(count<1)return;
refineAndSquareBbox(thirdBbox_, img_h, img_w);
nms(thirdBbox_, thirdBboxScore_, nms_threshold[2], "Min");
finalBbox_ = thirdBbox_;
firstBbox_.clear();
firstOrderScore_.clear();
secondBbox_.clear();
secondBboxScore_.clear();
thirdBbox_.clear();
thirdBboxScore_.clear();
}
int main(int argc, char** argv)
{
/******读图(start)*******/
const char* imagepath ;// argv[1];
if (argc == 2)
{
imagepath = argv[1];
}
else{
imagepath = "E:/Algrithm/ncnn/ncnn/x64/Release/test2.jpg";
}
cout << imagepath << endl;
cv::Mat cv_img = cv::imread(imagepath);
if (cv_img.data==NULL)
{
fprintf(stderr, "cv::imread %s failed\n", imagepath);
system("pause");
return -1;
}
printf("img w: %d h:%d ch:%d\n",cv_img.cols,cv_img.rows,cv_img.channels());
imshow("img",cv_img);
waitKey(10);
/***************读图(end)********************/
/***********MTCNN运算(start)************/
float start = clock();
int times = 1;
ncnn::set_omp_num_threads(4);
for (int cnt = 0; cnt < times; cnt++)
{
std::vector finalBbox;
mtcnn Net;
//OpenCV读出的图片是BGR格式的,需要转为RGB格式,否则检出率会很低。
ncnn::Mat ncnn_img = ncnn::Mat::from_pixels(cv_img.data, ncnn::Mat::PIXEL_BGR2RGB, cv_img.cols, cv_img.rows);
Net.detect(ncnn_img, finalBbox);
for (vector::iterator it = finalBbox.begin(); it != finalBbox.end(); it++){
if ((*it).exist)
{
printf("Bbox [x1,y1], [x2,y2]:[%d,%d], [%d,%d] \n", (*it).x1, (*it).x2, (*it).y1, (*it).y2);
rectangle(cv_img, Point((*it).x1, (*it).y1), Point((*it).x2, (*it).y2), Scalar(0, 0, 255), 2, 8, 0);
for (int num = 0; num < 5; num++)
{
printf("Landmark [x1,y1]: [%d,%d] \n", (int)*(it->ppoint + num), (int)*(it->ppoint + num + 5));
circle(cv_img, Point((int)*(it->ppoint + num), (int)*(it->ppoint + num + 5)), 3, Scalar(0, 255, 255), -1);
}
}
}
}
/***********MTCNN运算(end)************/
printf("MTCNN mean time comsuming: %f ms\n",(clock()-start)/times);
imshow("result.jpg",cv_img);
waitKey(100);
system("pause");
return 0;
}
#endif