关于汽车悬挂系统减震控制的进一步研究(自动控制原理课程设计小论文)
摘要
随着社会的进步、科技的发展,人们生活水平不断提高,乘坐车辆的频率增多,对于汽车乘坐舒适性的要求也越来越高。另一方面,由于最近几年国内外汽车制造业的迅猛发展,汽车制造业的竞争也日益激烈,各个汽车制造公司加强研发力量,试图开发出乘坐舒适性好、高性能、经济的产品,以期望使自己公司在激烈的市场竞争中长盛不衰。
理想的悬挂系统不仅能使车随路面起伏而上下运动,并能借此使整个车身在前进过程中尽量保持水平,而且还能随车速、路况、运动方式的变化做出适当、灵敏的反应;同时,它还能使轮胎与路面随时贴合,并使车轮保持适当的角度,从而使汽车的动力性能、制动性能以及转向性能得以充分体现。因此,现代汽车的悬挂系统越来越受到业内人士的重视。
为了使乘客乘坐舒适,有必要对汽车的悬挂系统的振动性能进行深入分析。需要透彻地分析汽车悬挂系统的动力特性,从而剖析车辆行驶的运动特性。分析汽车悬挂系统是改进车辆的运动特性的依据,是提高汽车行驶中的舒适性与安全性的基础。
本文着重分析了汽车悬挂系统的数学模型,并进行了系统仿真,对其减震、抗震性能进行分析。本文聚焦于汽车进行减震控制的方法,并对其中暴露出来的一些奇怪现象进行剖析以及规律性探索和总结。
关键词:控制、正反馈、悬挂系统、减震
目录
第1章 绪论 1
1.1 简述 1
1.2 悬挂结构 1
第2章 悬挂系统建模 3
2.1 模型说明 3
2.2 系统建模 5
2.3 模型求解 6
2.3.1 伯德图稳定性分析 7
2.3.2 奈氏图稳定性分析 7
2.3.3 直接法稳定性分析 8
2.3.4 系统的单位阶跃响应 8
第3章 系统仿真 9
3.1 建模产生的问题 9
3.2 仿真实现 9
3.3 仿真结果 10
第4章 总结与展望 11
4.1 结论 11
4.2 展望 11
结束语 12
参考文献 13
附录 14
第1章 绪论
1.1 简述
当今世界,随着现代工业技术的飞速发展,汽车工业也迎来了一个崭新的时代,人们对汽车行驶中的安全性、稳定性和舒适性也提出了更高的要求,从而对与之关系密切的汽车悬挂系统的要求也更高。基于我国的交通情况,很多汽车都是有在凹凸不平的路面行驶的可能性的,因此悬挂系统是汽车必备的组成部分。

图1 汽车实物模型
1.2 悬挂结构
悬挂作为现代汽车上的重要系统之一,把车架(或车身)与车轴(或车轮)弹性地连接起来,传递作用在车轮和车架(或车身)之间的一切力和力矩,并且缓和由不平路面传给车架(或车身)的冲击载荷,衰减由此引起的承载,系统的振动,以保证汽车平顺地行驶,其性能直接影响到车辆的乘坐舒适性和操作稳定性。汽车悬挂系统中重要的力元件除了使用弹簧和减震器之外,在其结构件的连接大量使用弹性元件,包括橡胶衬套、橡胶缓冲块、液压衬套等弹性元件[1]。
汽车悬挂是连接车轮与车身的机构,对车身起支撑和减振的作用。主要是传递作用在车轮和车架之间的力,并且缓冲由不平路面传给车架或车身的冲击力,衰减由此引起的震动,以保证汽车能平顺地行驶。

图2 汽车悬挂位置
典型的悬挂系统结构主要包括弹性元件、导向机构以及减震器等部分。弹性元件又有钢板弹簧、空气弹簧、螺旋弹簧以及扭杆弹簧等形式,而现代轿车悬挂系统多采用螺旋弹簧和扭杆弹簧,个别高级轿车则使用空气弹簧。

图3 汽车悬挂结构图
在悬挂的减振机构中,除了减振器还会有根弹簧,它们共同合作,才能完成减振的任务。当车辆行驶在不平路面时,弹簧受到地面冲击后发生形变,而弹簧需要恢复原型会出现来回震动的现象,这样显然会影响汽车的操控性和舒适性。而减振器起到对弹簧起到阻尼的作用,抑制弹簧来回摆动。这样在汽车通过不平路段时,才不至于不停的颤动[2]。

图4 减震器结构图
第2章 悬挂系统建模
2.1 模型说明
汽车在随机不平度路面上行驶时,路面的随机输入经过由轮胎、悬架、减振器、座椅、悬挂质量所构成的振动系统时,传递到人和汽车,从而使人、车轮、车桥与车架都产生响应。实际汽车的机械振动系统往往是很复杂的,影响振动的因素很多,所以在分析和计算时,必须抓住主要因素,而略去一些次要因素,将实际系统简化和抽象为动力学模型。因此,建立合理的汽车的动力学模型,对于分析和计算的结果的准确性是至关重要的。
同时,汽车模型应用广泛,存在着非常多的力学模型。比如说时滞正反馈控制下1/4汽车悬架系统的力学模型、三自由度汽车悬挂系统模型、八自由度汽车悬挂系统模型等…不同的模型针对不同的问题,考虑振动控制效果和控制力输入,以时滞和反馈增益系数为设计变量,应用粒子群优化算法,研究设计变量的多目标优化问题可采用时滞正反馈悬架系统的力学模型;要把人与车体单独考虑,更好地分析舒适度,可采用三自由度汽车悬挂系统模型;要模拟出轿车在路面上的振动,测出其在竖直方向上的位移,速度可采用八自由度汽车悬挂系统模型。
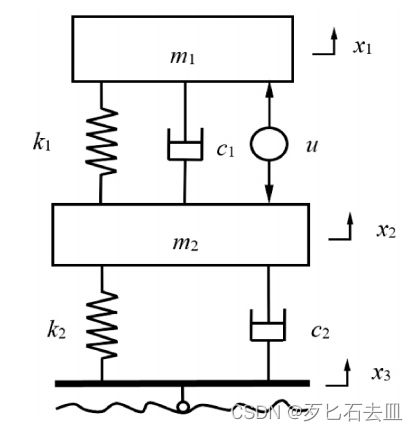
图5 时滞正反馈控制下 1 /4 汽车悬架系统的力学模型
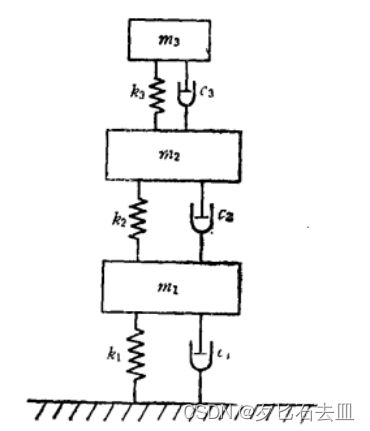
图6 三自由度汽车悬挂系统模型
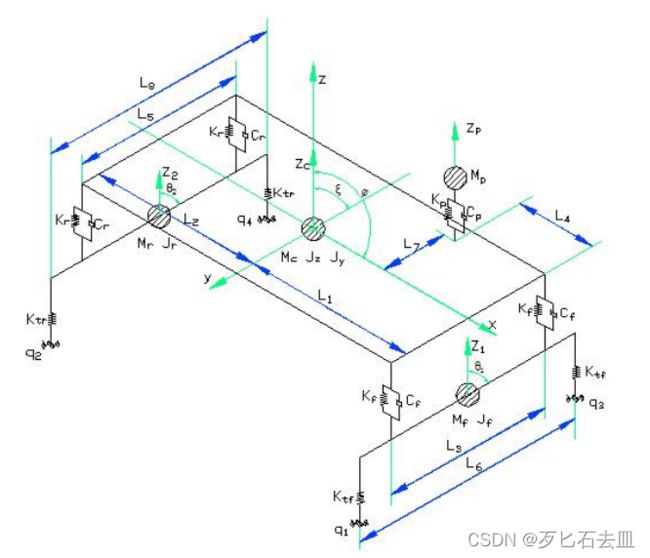
图7 八自由度汽车悬挂系统模型
但是本文将忽略掉众多无关因素,假设汽车的结构完全对称、所有轮子完全一致。基于上述合理假设,选取略微简单的建模思路。以下将会具体进行数学建模,以期可以进一步分析研究系统。
2.2 系统建模
为了便于建模,将车辆简化为车体、车架、弹簧、阻尼四部分组成,如下图所示。

图8 汽车悬挂系统简化后的物理模型
由于左右对称,系统可进一步简化:

图9 二次简化后的物理模型


系统方框图:

图10 悬挂系统的方框图
由方框图求传递函数:

由图3可以看出,系统是一个正反馈系统。那么一个担心发生了——车辆会不会因为地面的微小不平整而发生巨大的正反馈反应,甚至翻车。这是一层直觉上的忧虑,在检查完所有的建模步骤后,在加之传递函数是有可能趋于稳定的一种形式,因此,继续进行探索的好奇心和必要性加大了。
2.3 模型求解
表1 基本数据的定量[3]
组次 车架质量(kg) 车体质量(kg) 弹簧K1 () 弹簧K2 () 阻尼C ()
第一组 500 2000 1300 250 9000
第二组 500 1400 1300 250 9000
第三组 500 1400 1300 250 8000
由于将上述数据代入得到的效果差别不大,因此只用第一组来分析。
2.3.1 伯德图稳定性分析
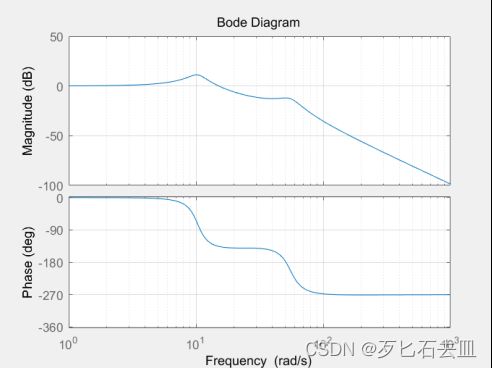
图11 系统伯德图
由系统伯德图可以看出截止频率在11rad/s,此时的相角裕度是大于0的,在45度左右,赋值裕度大于0dB。因此可见系统是稳定的。
2.3.2 奈氏图稳定性分析
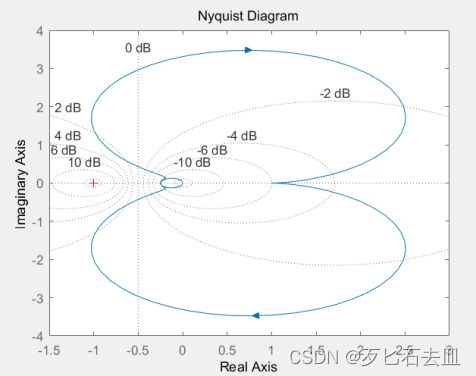
图12 系统奈奎斯特图
由奈奎斯特图可以看出N=0,开环传递函数的右半平面极点P=0,因此Z=P+N=0。因此可见系统是稳定的。
2.3.3 直接法稳定性分析

图13 闭环传递函数跟分布
使用MATLAB强大的计算能力,可以直接求出闭环的极点。可见四个极点都是拥有负实部的,因此系统是稳定的。而且系统可以由四阶系统简化成为一个二阶系统,因为离虚轴近的那一对极点满足主导极点的要求。
2.3.4 系统的单位阶跃响应
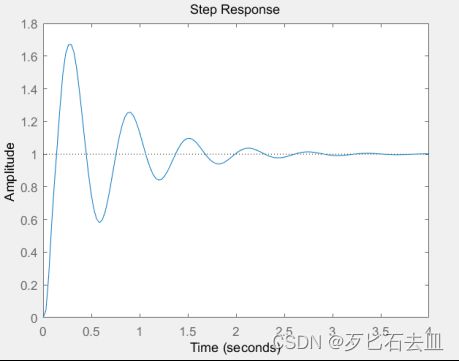
图14 系统的单位阶跃响应
由系统的单位阶跃响应可以看出,系统是可以趋于稳定的,但动态性能非常差强人意,出现了较大的超调,并且伴随着很长的调节时间。这些指标极有可能与车辆各参数的选取有关。
第3章 系统仿真
3.1 建模产生的问题
该系统是一个正反馈,但根据各种分析手段证明该系统可以保持稳定。那么这之中一定存在一些方法和原理值得挖掘。
下面通过simulink进行系统仿真,进而分析系统的性能。但在这之前,不得不提的汽车悬挂系统的用于减震,因此仿真设计也是基于这一条开展的。
3.2 仿真实现
按照方框图的结构和系统参数的数值搭建如下仿真系统。路面的输入相当于一个复杂无规则的波形,那么根据我们学过的傅里叶变换,复杂的波形可以简化为若干正弦波的加权叠加。因此,合理地,我们利用正弦波模拟凹凸不平的路面。

图15 系统仿真图
根据MATLAB建模分析得到的闭环传递函数,得到一些参量,据此构建了另一套并行的仿真系统,用以相互验证。如图:

图16 闭环系统仿真图
3.3 仿真结果
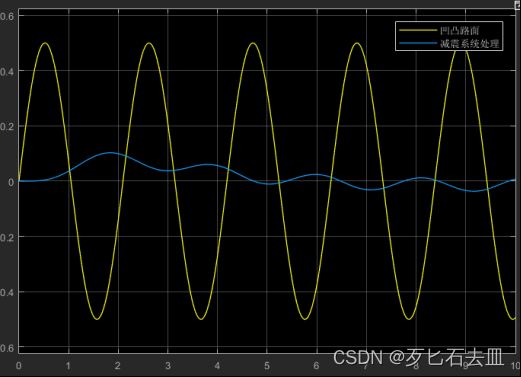
图17 正弦输入时的输出变化
结果如图。两套系统的结果完全一致,黄线是表示凹凸不平的路面,蓝线是表示车体的位移。可见相对于路面的持续变化,车体也是在上下震动的,但震动的幅值大幅缩减,可见悬挂系统有良好的减震作用。
图18 锯齿波输入时的输出变化
对于这样直上直下的路面可以看出车辆的重心变化的非常柔和,对于人的舒适度来说,这是一个好的现象。
第4章 总结与展望
4.1 结论
简化后的汽车悬挂系统是一个正反馈系统,这样的系统也可以保持稳定,化简的过程中消除了一些不利于稳定的负向因素,但是经过MATLAB计算,该闭环传递函数的动态性能并不出众,闭环极点靠近虚轴,反应较慢。但有可能就是因为这些特质,该系统才会有一定的减震特性。而且通过系统仿真可以看出,该系统有较强的减震效果。对汽车在行驶过程中的安全性、稳定性和舒适性有极大的正面作用。但仅靠弹簧和阻尼是无法满足人们日益精细化、高质量的需求的,需要更复杂更灵巧更先进的系统来进行替代弥补。
4.2 展望
汽车悬挂系统中重要的力学元件除了使用弹簧和减震器之外,在其结构件的连接大量使用弹性元件,包括橡胶衬套、橡胶缓冲块、液压衬套等弹性元件。我国目前汽车工业的发展已经是有一定的规模,大量的自主研发产品和自主改进汽车的性能已不在是梦想,而且需要提升汽车性能,所以悬挂系统的衬套发展越来越受到重视,橡胶衬套技术已然成熟,而且应用广泛,主要问题集中在使用寿命和疲劳寿命问题上。液压衬套的研发也越来越受到各大汽车公司的关注,我国主要是通过引进国外产品,使用尚未成规模,华南理工大学和宁波拓普集团股份有限公司对这方面研究处于领先地位。液压衬套技术是一个悬挂系统中弹性元件发展的趋势。
而且,汽车悬架系统的隔振效果也对汽车行驶的平顺性和安全性有着重要的影响。传统的被动悬架系统因具有结构简单、性能稳定和价格低廉等优点得到广泛应用。然而,在汽车行驶过程中被动悬架的结构参数无法进行调整,使其无法适应复杂的路况。为了克服这一缺陷,人们提出了主动和半主动汽车悬架系统。在主动控制中,时滞现象是无法避免的,它对系统的稳定性和振动控制效果影响很大。在某些不合理的取值情况下,时滞会导致系统失稳。鉴于此,人们提出了时滞补偿技术来减少或抵消时滞带来的消极影响。进一步的研究表明,若以时滞和反馈增益系数作为设计变量,在合理的设计变量取值下,时滞反馈控制不仅可以提高系统的稳定性,还可以改善振动控制效果[4]。
这些都是保持汽车平稳运行的重要因素,也是值得深入研究的方向。相信车辆的性能将会在各种技术的研发使用中得到质的提升。
结束语
学习完***讲授的《自动控制原理》,受益匪浅,在生活上的一些事情使得我的思考更加全面。
比如说,宿舍楼道里面的饮水机,它的计费方式是一个开环控制系统,只要校园卡放上去它就开始扣钱,而与我接没有接水没有关系。有一次我卡放上面没有拿走,第二天,卡里的水费全都没有了,后来在思考之后我发现它是只要卡放上去就会扣钱。这样的开环系统是不好的,实事上可以监测是否有水流,甚至水流的大小,然后反馈回来,并依据这个信号进行扣费,这样的话开环系统,就变为闭环系统了。
再比如说,宿舍门口的自动门也有很多控制方面的知识。进宿舍的时候,扫脸识别,识别成功之后放行。出宿舍的时候,它会利用红外传感器监测是否有人需要出去,若识别到就会自动放行。这样的系统对于学习过《自动控制原理》的人来说变得异常明了清晰,我甚至觉得可以自己动手把它设计出来。它的执行机构是一组电机,控制机构是连接的电脑,反馈是通过摄像头人脸识别或者红外线传感。有些时候,会发现它所控制的两个门叶,旋转的不协调,比如一个打开,另一个没有动。这明显是一次失败的控制。我能想到的方法是对两个门叶的电机给同样的信号,或者监督它们做同样的动作,要么同时开要么同时关。而去有些时候门叶的反应也是相当的慢的,我想这肯定代表了它的调节时间很长,那么对于减小调节时间,改善动态性能我们也学过很多方法可以拿来使用。
自控是一门应用极其广泛的学科,我在很多地方都能看到它的影子。它是改造世界的一把有力工具,今后的学习生活中,我一定要利用好这把工具,改善甚至彻底解决更多的实际问题。
参考文献
[1]吴波,邓莉娟.浅析汽车悬挂系统中弹性元件的研究与应用[J].科技创新导报,2012(14):60.
[2]陈启贞.图解汽车–汽车悬挂系统结构解析[EB/OL].
[3]梁艳春,王在申.汽车悬挂系统阻尼参数优化设计[J].汽车工程,1989(01):49-52.
[4]刘建均,孙艺瑕,李胜.时滞正反馈控制下汽车悬架系统的多目标优化[J].计算机应用与软件,2021,38(04):32-36+131.
附录
%% main code
clear;clc
m1=500;m2=2000;
K1=1300000; K2=250000; C=9000; %参数变量
syms s;
G=1/(m1*s^2+C*s+K1+K2)*(C*s+K2)/(m2*s^2+C*s+K2);%前向通道
H=C*s+K2;%反馈通路
GB=simplify(K1*G/(1-H*G));%闭环传递函数
[n,d]=numden(GB)
num=sym2poly(n)
den=sym2poly(d)
rot=roots(den)
plot(real(rot),imag(rot),'*')%绘制闭环根
grid on
figure
nyquist(num,den);%奈奎斯特图
grid on
figure
bode(num,den);%伯德图
grid on
figure
step(num,den)%阶跃响应
需要原文源文档带价私我!!!