Python+OpenCV图像处理(七)——Harris特征点检测
系列文章
Python+OpenCV图像处理(一)——OpenCV框架与图像插值算法
Python+OpenCV图像处理(二)——几何变换
Python+OpenCV图像处理(三)——彩色空间互换
Python+OpenCV图像处理(四)——图像滤波
Python+OpenCV图像处理(五)——图像阈值和二值化
Python+OpenCV图像处理(六)——边缘检测
Python+OpenCV图像处理(七)——Harris特征点检测
目录
-
- 七、Harris特征点检测
-
- 7.1 角点
- 7.2 Harris角点检测算法
-
- 7.2.1 建立数学模型
- 7.2.2 角点响应函数R
- 7.2.3 角点响应函数R
- 7.3 几点补充
- 7.4 基于OpenCV的实现
七、Harris特征点检测
在图像处理领域中,特征点又被称为兴趣点或者角点,它通常具有旋转不变性和光照不变性和视角不变性等优点,是图像的重要特征之一,常被应用到目标匹配、目标跟踪、三维重建等应用中。点特征主要指图像中的明显点,如突出的角点、边缘端点、极值点等等,用于点特征提取的算子称为兴趣点提取(检测)算子,常用的有Harris角点检测、FAST特征检测、SIFT特征检测及SURF特征检测。
注:注意区分边缘检测和特征点检测
7.1 角点
使用一个滑动窗口在下面三幅图中滑动,可以得出以下结论:
- 左图表示一个平坦区域,在各方向移动,窗口内像素值均没有太大变化
- 中图表示一个边缘特征(Edges),如果沿着水平方向移动(梯度方向),像素值会发生跳变;如果沿着边缘移动(平行于边缘) ,像素值不会发生变化
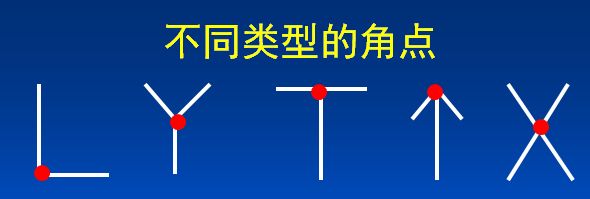
- 右图表示一个角(Corners),不管你把它朝哪个方向移动,像素值都会发生很大变化。

不同类型的角点
图像梯度
在图像局部内,图像梯度越大表示该局部内像素值变化越大(灰度的变化率越大)。 而图像的梯度在数学上可用微分或者导数来表示。对于数字图像来说,相当于是二维离散函数求梯度,并使用差分来近似导数:
G x ( x , y ) = H ( x + 1 , y ) − H ( x − 1 , y ) G_x(x,y)=H(x+1,y)-H(x-1,y) Gx(x,y)=H(x+1,y)−H(x−1,y)
G y ( x , y ) = H ( x , y + 1 ) − H ( x , y − 1 ) G_y(x,y)=H(x,y+1)-H(x,y-1) Gy(x,y)=H(x,y+1)−H(x,y−1)在实际操作中,对图像求梯度通常是考虑图像的每个像素的某个邻域内的灰度变化,因此通常对原始图像中像素某个邻域设置梯度算子,然后采用小区域模板进行卷积来计算,常用的有Prewitt算子、Sobel算子、Robinson算子、Laplace算子等。
7.2 Harris角点检测算法
算法的核心是利用局部窗口在图像上进行移动,判断灰度是否发生较大的变化。如果窗口内的灰度值(在梯度图上)都有较大的变化,那么这个窗口所在区域就存在角点。
step:
- 当窗口(局部区域)同时向 x (水平)和 y(垂直) 两个方向移动时,计算窗口内部的像素值变化量 E ( x , y ) E(x,y) E(x,y) ;
- 对于每个窗口,都计算其对应的一个角点响应函数 R R R;
- 然后对该函数进行阈值处理,如果 R > t h r e s h o l d R > threshold R>threshold,表示该窗口对应一个角点特征。
7.2.1 建立数学模型
让一个窗口的中心位于灰度图像的一个位置 ( x , y ) (x,y) (x,y),这个位置的像素灰度值为 I ( x , y ) I(x,y) I(x,y) ,如果这个窗口分别向 x x x 和 y y y 方向移动一个小的位移 u u u和 v v v,到一个新的位置 ( x + u , y + v ) (x+u,y+v) (x+u,y+v) ,这个位置的像素灰度值就是 I ( x + u , y + v ) I(x+u,y+v) I(x+u,y+v) 。
∣ I ( x + u , y + v ) − I ( x , y ) ∣ |I(x+u,y+v)-I(x,y)| ∣I(x+u,y+v)−I(x,y)∣就是窗口移动引起的灰度值的变化值。
设 w ( x , y ) w(x,y) w(x,y)为位置 ( x , y ) (x,y) (x,y)处的窗口函数,表示窗口内各像素的权重,最简单的就是把窗口内所有像素的权重都设为1,即一个均值滤波核。
当然,也可以把 w ( x , y ) w(x,y) w(x,y)设定为以窗口中心为原点的高斯分布,即一个高斯核。如果窗口中心点像素是角点,那么窗口移动前后,中心点的灰度值变化非常强烈,所以该点权重系数应该设大一点,表示该点对灰度变化的贡献较大;而离窗口中心(角点)较远的点,这些点的灰度变化比较小,于是将权重系数设小一点,表示该点对灰度变化的贡献较小。
则窗口在各个方向上移动 ( u , v ) (u,v) (u,v)所造成的像素灰度值的变化量公式如下:
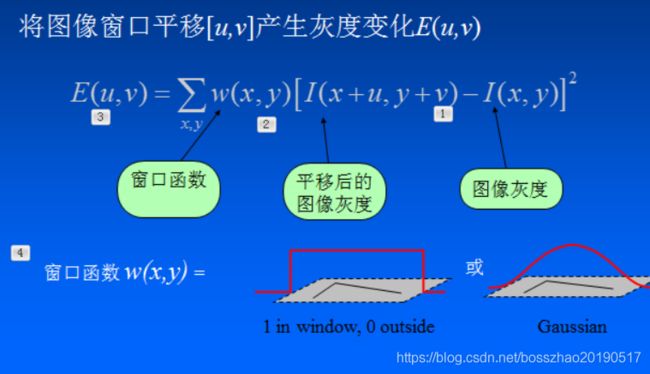
若窗口内是一个角点,则 E ( u , v ) E(u,v) E(u,v)的计算结果将会很大。
为了提高计算效率,对上述公式进行简化,利用泰勒级数展开来得到这个公式的近似形式:
对于二维的泰勒展开式公式为:
T ( x , y ) = f ( u , v ) + ( x − u ) f x ( u , v ) + ( y − v ) f y ( u , v ) + . . . . T(x,y)=f(u,v)+(x-u)f_x(u,v)+(y-v)f_y(u,v)+.... T(x,y)=f(u,v)+(x−u)fx(u,v)+(y−v)fy(u,v)+....
则 I ( x + u , y + v ) I(x+u,y+v) I(x+u,y+v) 为:
I ( x + u , y + v ) = I ( x , y ) + u I x + v I y I(x+u,y+v)=I(x,y)+uI_x+vI_y I(x+u,y+v)=I(x,y)+uIx+vIy
其中 I x I_x Ix和 I y I_y Iy是 I I I的微分(偏导),在图像中就是求 x x x 和 y y y 方向的梯度图:
I x = ∂ I ( x , y ) ∂ x I_x=\frac{\partial I(x,y)}{\partial x} Ix=∂x∂I(x,y)
I y = ∂ I ( x , y ) ∂ y I_y=\frac{\partial I(x,y)}{\partial y} Iy=∂y∂I(x,y)
将 I ( x + u , y + v ) = I ( x , y ) + u I x + v I y I(x+u,y+v)=I(x,y)+uI_x+vI_y I(x+u,y+v)=I(x,y)+uIx+vIy代入 E ( u , v ) E(u,v) E(u,v)可得:
提出 u u u和 v v v,得到最终的近似形式:

其中矩阵M为:

最后是把实对称矩阵对角化处理后的结果,可以把R看成旋转因子,其不影响两个正交方向的变化分量。
经对角化处理后,将两个正交方向的变化分量提取出来,就是 λ 1 λ_1 λ1 和 λ 2 λ_2 λ2(特征值)。
注: 这里 I x I_x Ix和 I y I_y Iy的值与 λ 1 λ_1 λ1 和 λ 2 λ_2 λ2 的值成正相关。 λ 1 λ_1 λ1 和 λ 2 λ_2 λ2 越大,则图像在 x x x 和 y y y 方向的梯度就大,说明是边缘,反之,则不是。
7.2.2 角点响应函数R
现在我们已经得到 E ( u , v ) E(u,v) E(u,v)的最终形式,别忘了我们的目的是要找到会引起较大的灰度值变化的那些窗口。
灰度值变化的大小则取决于矩阵M,M为梯度的协方差矩阵。在实际应用中为了能够应用更好的编程,所以定义了角点响应函数R,通过判定R大小来判断像素是否为角点。
计算每个窗口对应的得分(角点响应函数R定义):
其中 d e t ( M ) = λ 1 λ 2 det(M)=\lambda_1\lambda_2 det(M)=λ1λ2是矩阵的行列式, t r a c e ( M ) = λ 1 + λ 2 trace(M)=\lambda_1+\lambda_2 trace(M)=λ1+λ2 是矩阵的迹。
λ 1 λ_1 λ1 和 λ 2 λ_2 λ2 是矩阵 M M M的特征值, k k k是一个经验常数,在范围 (0.04, 0.06) 之间。
注: R R R的值取决于 M M M的特征值,对于角点 ∣ R ∣ |R| ∣R∣很大,平坦的区域 ∣ R ∣ |R| ∣R∣很小,边缘的 R R R为负值。
ps:这里角点响应函数R为什么这么取??
7.2.3 角点响应函数R
根据 R 的值,将这个窗口所在的区域划分为平面、边缘或角点。为了得到最优的角点,我们还可以使用非极大值抑制。
注意:Harris 检测器具有旋转不变性,但不具有尺度不变性,也就是说尺度变化可能会导致角点变为边缘。想要尺度不变特性的话,可以关注SIFT特征。
Harris角点检测算子使用的是角点附近的区域灰度二阶矩矩阵。而二阶矩矩阵可以表示成一个椭圆,椭圆的长短轴正是二阶矩矩阵特征值平方根的倒数。当特征椭圆转动时,特征值并不发生变化,所以判断角点响应值也不发生变化,由此说明Harris角点检测算子具有旋转不变性。
因为特征值 λ1 和 λ2 决定了 R 的值,所以我们可以用特征值来决定一个窗口是平面、边缘还是角点:
- 平面::该窗口在平坦区域上滑动,窗口内的灰度值基本不会发生变化,所以 ∣ R ∣ |R| ∣R∣ 值非常小,在水平和竖直方向的变化量均较小,即 I x I_x Ix和 I y I_y Iy都较小,那么 λ 1 λ_1 λ1 和 λ 2 λ_2 λ2 都较小
- 边缘: ∣ R ∣ |R| ∣R∣值为负数,仅在水平或竖直方向有较大的变化量,即 I x I_x Ix和 I y I_y Iy只有一个较大,也就是 λ 1 λ_1 λ1>> λ 2 λ_2 λ2 或 λ 2 λ_2 λ2>> λ 1 λ_1 λ1
- 角点: ∣ R ∣ |R| ∣R∣值很大,在水平、竖直两个方向上变化均较大的点,即 I x I_x Ix和 I y I_y Iy 都较大,也就是 λ 1 λ_1 λ1和 λ 2 λ_2 λ2 都很大

Harris 角点检测的结果是带有这些分数 R 的灰度图像,设定一个阈值,分数大于这个阈值的像素就对应角点。
7.3 几点补充
Harris角点检测算子具有旋转不变性
Harris角点检测算子使用的是角点附近的区域灰度二阶矩矩阵。而二阶矩矩阵可以表示成一个椭圆,椭圆的长短轴正是二阶矩矩阵特征值平方根的倒数。当特征椭圆转动时,特征值并不发生变化,所以判断角点响应值也不发生变化,由此说明Harris角点检测算子具有旋转不变性。

Harris角点检测算子不具有尺度不变性
尺度的变化会将角点变为边缘,或者边缘变为角点,Harris的理论基础并不具有尺度不变性。

Harris角点检测算子对亮度和对比度的变化不敏感(光照不变性)
在进行Harris角点检测时,使用了微分算子对图像进行微分运算,而微分运算对图像密度的拉升或收缩和对亮度的抬高或下降不敏感。换言之,对亮度和对比度的仿射变换并不改变Harris响应的极值点出现的位置,但是,由于阈值的选择,可能会影响角点检测的数量。

7.4 基于OpenCV的实现
在opencv中有提供实现 Harris 角点检测的函数 cv2.cornerHarris
函数原型:cv2.cornerHarris(src, blockSize, ksize, k[, dst[, borderType]])
src - 输入灰度图像,float32类型
blockSize - 用于角点检测的邻域大小,就是上面提到的窗口的尺寸
ksize - 用于计算梯度图的Sobel算子的尺寸
k - 用于计算角点响应函数的参数k,取值范围常在0.04~0.06之间
#%%
import cv2
from matplotlib import pyplot as plt
import numpy as np
# detector parameters
block_size = 3
sobel_size = 3
k = 0.06
image = cv2.imread('Rolls-Royce.jpg')
print(image.shape)
height = image.shape[0]
width = image.shape[1]
channels = image.shape[2]
print("width: %s height: %s channels: %s"%(width, height, channels))
#%%
gray_img = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#%%
# modify the data type setting to 32-bit floating point
gray_img = np.float32(gray_img)
# detect the corners with appropriate values as input parameters
corners_img = cv2.cornerHarris(gray_img, block_size, sobel_size, k)
#%%
#cv2.imshow('corners_img',corners_img)
#%%
#这段代码是膨胀,提升后续图像角点标注的清晰准确度,可有可无,也可以注释掉
# result is dilated for marking the corners, not necessary
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3, 3))
dst = cv2.dilate(corners_img, kernel)
# Threshold for an optimal value, marking the corners in Green
#image[corners_img>0.01*corners_img.max()] = [0,0,255]
for r in range(height):
for c in range(width):
pix=dst[r,c]
if pix>0.1*dst.max():
#图像,圆心,半径
cv2.circle(image,(c,r),5,(0,0,255),0)
#这里是设定一个阈值 当大于这个阈值分数的都可以判定为角点
#dst[r,c]其实就是一个个角点响应R组成的
#那么这里为什么要大于0.1*dst.max()呢
#这个其实就是设定的阈值,可以根据图像自己选取,不过如果太小的话,可能会多圈出几个不同的角点
cv2.imwrite('Rolls-Royce_harris.jpg',image)
cv2.imshow('Rolls-Royce_harris.jpg',image)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.imshow(image)
plt.show()
cv2.waitKey(0)
cv2.destroyAllWindows()

