标定学习笔记(一)-- 单目相机的标定
一文图解单目相机标定算法 (qq.com)
一、什么是相机标定?
任何传感器都存在一定的误差,从狭义上来说,标定就是去校正这部分的误差,让传感器尽量准确一点。
相机要进行标定的参数,跟相机实际的光圈、焦距大小有关,而这两个参数,在一般的工业相机中都是可调节的,所以需要我们针对实际情况进行标定。
常说的标定不光指纠正传感器的误差,当涉及到两个或者多个传感器的标定的时候,往往还包括计算出这些传感器间的相互位置关系。比如说在机器人系统中,我们经常需要在不同坐标系下转换位置关系,那么我们所说的一些标定还包括标定出这些关节、传感器之间的相互位置关系。再比如说我们双目相机的标定,就包括左相机、右相机的传感器误差标定,还包括它们之间相互位置关系的这么一个标定。
概括一下,常说的标定包括两部分的内容:传感器误差的校正、传感器相互之间的位置关系。而单目相机的标定主要是指前者:传感器误差的校正,常用的方法是张正友标定法。
常见的单目相机标定方法是张正友标定法,这在很多软件,比如MATLAB、或者OpenCV中都有相应的实现。至于相机标定,需要标定哪些参数,还需要先来了解下单目相机的成像模型。
二、理想单目相机成像模型
在介绍高斯光学时,我们介绍了小孔成像与针孔相机模型的基础。实际上,小孔成像的模型其实可以看作是针孔相机模型的基础:

进一步地,针孔相机模型可以简化为下面这个模型:

上图中,P点是物点,p'是前者在CCD上成像的像点, 是相机的光心,
是相机的光心, 是成像平面到光心的距离,我们称之为焦距。
是成像平面到光心的距离,我们称之为焦距。
实际上,焦距的定义会更复杂,可以参考我们之前在机器视觉学习笔记相机中的描述。
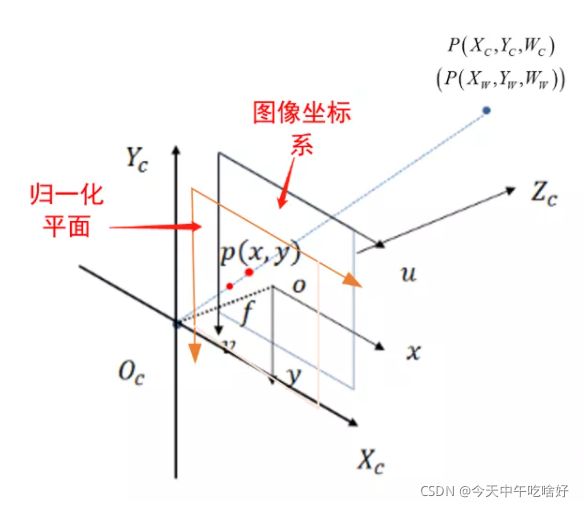
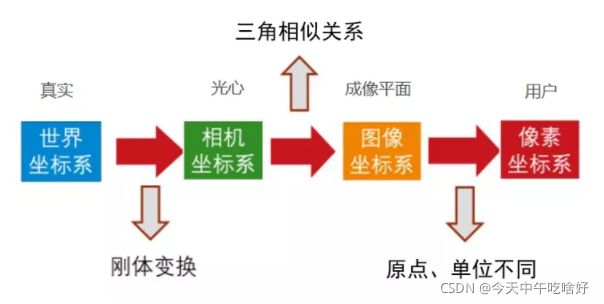
这里先把模型简化一下,下面我们来讲解整个成像过程,在相机成像模型中,主要有四大坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。

其中:
1)世界坐标系![]() (3D):世界坐标系就是以外界某个参考点建立的坐标系,单位为mm,或者m。
(3D):世界坐标系就是以外界某个参考点建立的坐标系,单位为mm,或者m。
2)相机坐标系![]() (3D):以光心建立相机坐标系,其中轴指向相机的正前方。
(3D):以光心建立相机坐标系,其中轴指向相机的正前方。
3)图像坐标系![]() (2D):光心在成像平面的投影,光心为图像中点o点,以o点建立另一坐标系,称为图像坐标系,单位为mm。
(2D):光心在成像平面的投影,光心为图像中点o点,以o点建立另一坐标系,称为图像坐标系,单位为mm。
4)像素坐标系![]() (2D):像素坐标系是我们最终用户所看到的,也就是坐标系的原点在图像左上角,单位为像素。
(2D):像素坐标系是我们最终用户所看到的,也就是坐标系的原点在图像左上角,单位为像素。
为了建立实际物理点(世界坐标系)到图像上点(像素坐标系)的一一映射,我们需要三步转换,也就是:
世界坐标系  相机坐标系 图像坐标系 像素坐标系
相机坐标系 图像坐标系 像素坐标系
2.1 世界坐标系 相机坐标系
首先,我们知道,世界坐标系是以外界某个参考点建立的坐标系,而相机坐标系则是以相机的光心为坐标原点,光轴的正方向作为Z轴建立的坐标系,两者属于刚体变换,只需要进行旋转和平移,如下所示:
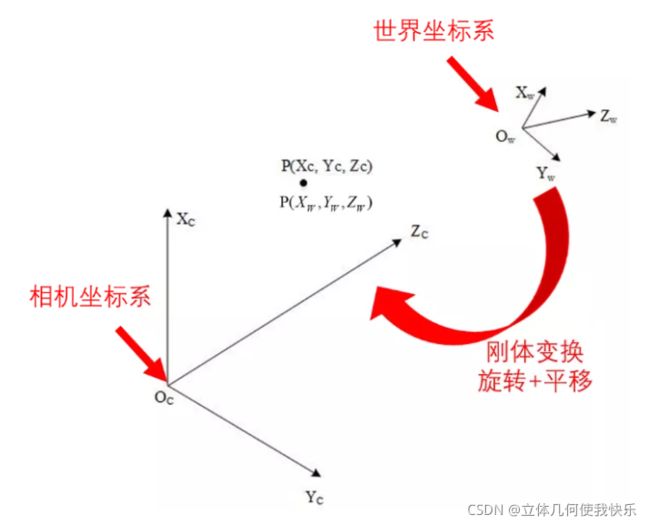
我们假设物点在世界坐标系下的坐标为![]() ,那么转换到相机坐标系下坐标
,那么转换到相机坐标系下坐标![]() 的变换如下:
的变换如下:
(为了统一旋转和平移,我们将其写为齐次形式)
2.2 相机坐标系 图像坐标系
在完成了世界坐标系 相机坐标系的转换后,我们再从相机坐标系转换到图像坐标系。为了方便描述,我们将针孔相机模型对称翻转过来,如下图所示,从数学的角度,它们是等价的:
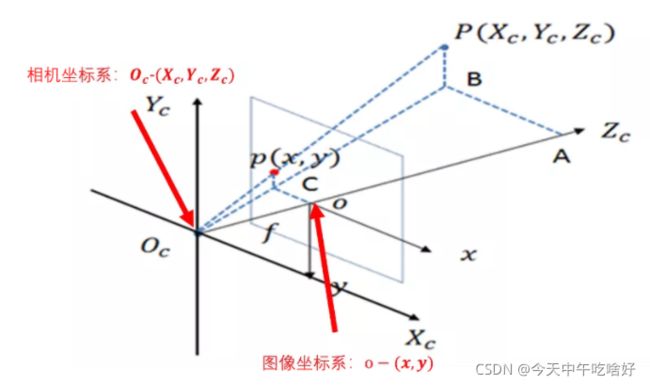
如我们之前所说的,P点是物点、P'点是像点,现在我们将它反转过来了,记作小写的p,其中:
相机坐标系:以光心建立相机坐标系![]() ,其中
,其中![]() 轴指向相机的正前方。
轴指向相机的正前方。
图像坐标系:光心在成像平面的投影,也就是 点建立另一坐标系,称为图像坐标系。
点建立另一坐标系,称为图像坐标系。
物点P在相机坐标系下的坐标,记为![]() ,而像点p可以记为
,而像点p可以记为![]() ,根据简单的相似三角形的关系,很容易可以得到:
,根据简单的相似三角形的关系,很容易可以得到:
![]()
与之前俺的公式进行统一,写为齐次形式:
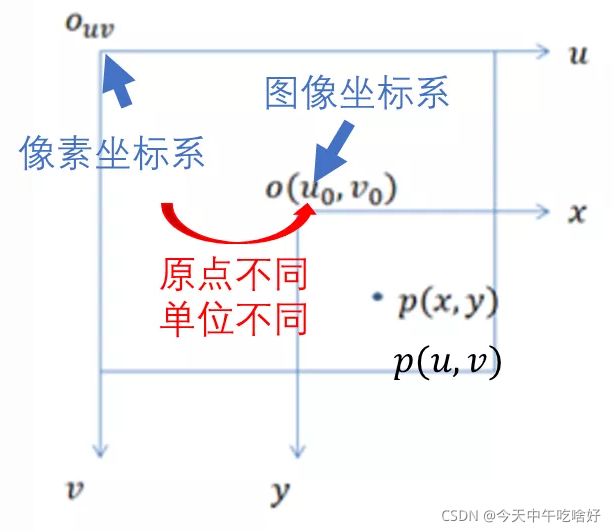
2.3 图像坐标系 像素坐标系
在图像坐标系中,坐标的原点在图像中间,而我们平时处理图像时用的坐标系,称为像素坐标系,坐标系的原点在图像的左上角,此外它们的度量单位也不同,前者的单位是mm,而后者的单位是像素。
总结一下,图像坐标系和像素坐标系主要有两点不同:原点不同、单位不同。
我们用 来记录像素的列数与行数,那么:
来记录像素的列数与行数,那么:
1)图像坐标系下坐标系原点,在像素坐标系![]() 下记为:
下记为:![]() ;
;
2)像点p,在![]() 坐标系下记为:
坐标系下记为: ;
;
此外,再分别记dx、dy为每个像素在x轴、y轴所代表的物理尺寸,我们很容易可以从上图中推导出下列关系:
![]()
将其进行移项,并写为齐次的形式,有:
2.4 汇总
总结一下之前所说的四大坐标系的关系:
它们的公式如下:
1)世界坐标系 相机坐标系
(刚体变换)
2)相机坐标系 图像坐标系

(相似三角形)
3)图像坐标系 像素坐标系
将上述的式子进行联立,最终可以得到:
进一步化简:
这个公式就是整个单目相机在理想情况下的成像公式,可以建立世界坐标系到像素坐标系的一一映射。
补充一点:
归一化平面,其实际是图像坐标系的等比缩放,也就是当焦距 的情况,主要是便于公式的推导,它与图像坐标系是等比缩放关系,只需要乘以焦距就可完成相互转换。
的情况,主要是便于公式的推导,它与图像坐标系是等比缩放关系,只需要乘以焦距就可完成相互转换。