29.GAN
目录
- GAN
- WGAN
- 代码
-
- GAN
- WGAN

training set是真实图像的分布Pr(x),generator根据Pg(x)分布,生成一个图像fake images,Discriminator通过学习两个分布,能够鉴别从两个分布中取出的样本图像。我们的目标是达到纳什均衡后,Pg(x)分布接近于Pr(x)。

真实的x样本分布,越大越好
x经过D函数,得到一个数D(x)
z经过G函数,得到X’g,再经过D函数,得到D(G(z))

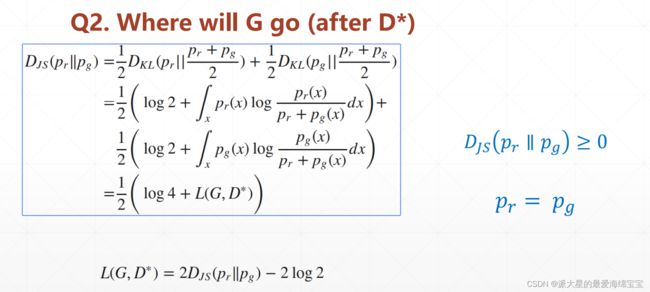
当满足右边条件时,L等于2log2。
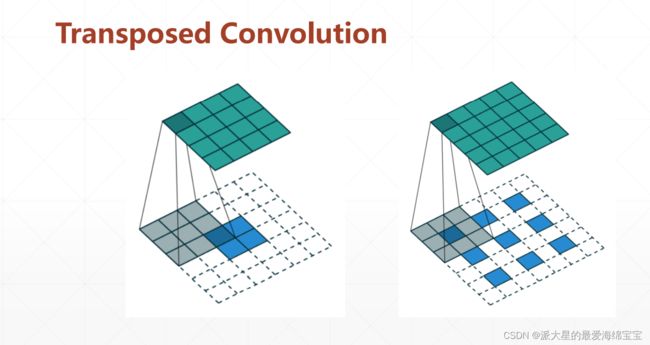
transposed convolution有时叫做DC。
GAN
z是一个隐藏变量,输入是可以根据具体任务随意设定的,输出是真实分布的维度,输出的2包含了x坐标和y坐标。
z的2是隐藏层的,第一个线性层的2是随意设置的,最后一个2是可视化的2维分布。
yield dataset会运行并且保存当前状态,下一次运行迭代器后,会直接从当前位置开始。
torch.manual_seed(23)
np.random.seed(23)
把它放在前面,是因为每次训练都具有随机性,结果会有点出入,放在前面可以减小随机性。
Gan核心部分
第一步,先训练Discriminator
for epoch in range(50000):
for _ in range(5):
# 1.1 train on real data
#numpy
xr=next(data_iter)
xr=torch.from_numpy(xr)#.cuda()
#[b,2]=>[b,1] 1维sigmod
predr=D(xr)
# max predr
lossr=-predr.mean()
# 1.2 train on fake data
z=torch.randn(batchsz,2)
xf=G(z).detach() #tf.stop_gradient()
predf=D(xf)
lossf=predf.mean()
#aggregate all
loss_D=lossr+lossf
#optimizer
optim_D.zero_grad()
loss_D.backward()
optim_D.step()
lossr使用负号,是因为梯度下降。
其中.detach()函数,相当于闸门,梯度只会传到xf这里就会断掉,不会往前穿,可以减少计算量,并且避免了把generator的梯度计算进来。
第二步,再训练Generator
z=torch.randn(batchsz,2)
xf=G(z)
predf=D(xf)
loss_G=-predf.mean()
#optimize
optim_G.zero_grad()
loss_G.backward()
optim_G.step()
if epoch%100==0:
print(loss_D.item(),loss_G.item())
generator的目标就只有一个,xf在D中的概率越大越好。
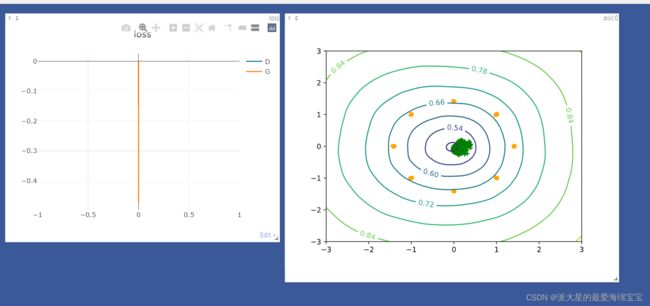
8个黄色的点是高斯混合模型。
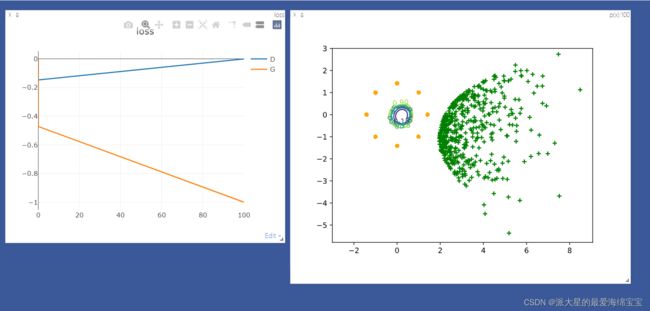
绿色是sample出的点。
现在的gan是train很不稳定,还没有收敛。
WGAN
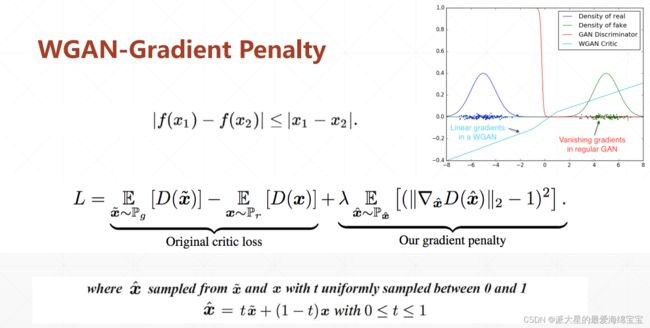
在GAN中的第一步后,再加上1.3步gradient penalty
# 1.3 gradient penalty
gp=gradient_penalty(D,xr,xf)
def gradient_penalty(D,xr,xf):
'''
:param D:
:param xr:[b,2]
:param xf:[b,2]
:return:
'''
#[b,1]
t=torch.rand(batchsz,1)
#[b,2]=>[b,2]
t=t.expand_as(xr)
#interpolation
mid=t*xr+(1-t)*xf
#set it requires gradient
mid.requires_grad_()
pred=D(mid)
grads=autograd.grad(outputs=pred,inputs=mid,
grad_outputs=torch.ones_like(pred),
create_graph=True,retain_graph=True,only_inputs=True)[0]
gp=torch.pow(grads.norm(2,dim=1)-1,2).mean()
return gp

代码
GAN
import torch
from torch import nn,optim,autograd
import numpy as np
import visdom
import random
from matplotlib import pylab as plt
h_dim=400
batchsz=512
viz=visdom.Visdom()
class Generator(nn.Module):
def __init__(self):
super(Generator, self).__init__()
self.net=nn.Sequential(
# z:[b,2]=>[b,2]
nn.Linear(2,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,2)
)
def forward(self,z):
output=self.net(z)
return output
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator, self).__init__()
self.net=nn.Sequential(
nn.Linear(2,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,1),
nn.Sigmoid()
)
def forward(self,x):
output=self.net(x)
return output.view(-1)
def data_generator():
'''
8-gaussian mixture models
:return:
'''
scale=2.
centers=[
(1,0),
(-1,0),
(0,1),
(0,-1),
(1./np.sqrt(2),1./np.sqrt(2)),
(1./np.sqrt(2),-1./np.sqrt(2)),
(-1./np.sqrt(2),1./np.sqrt(2)),
(-1./np.sqrt(2),-1./np.sqrt(2))
]
centers=[(scale*x,scale*y)for x,y in centers]
while True:
dataset=[]
for i in range(batchsz):
point=np.random.randn(2)*0.02
center=random.choice(centers)
#N(0,1)+center_x1/x2
point[0]+=center[0]
point[1] += center[1]
dataset.append(point)
dataset=np.array(dataset).astype(np.float32)
dataset/=1.414
yield dataset
def generator_image(D,G,xr,epoch):
'''
Generator and saves a plot of the true distribution,the generator and the cr itic
'''
N_POINTS=128
RANGE=3
plt.clf()
points=np.zeros((N_POINTS,N_POINTS,2),dtype='float32')
points[:,:,0]=np.linspace(-RANGE,RANGE,N_POINTS)[:,None]
points[:,:,1]=np.linspace(-RANGE,RANGE,N_POINTS)[None,:]
points=points.reshape((-1,2))
#[16384,2]
#print('p:',points.shape)
#draw contour
with torch.no_grad():
points=torch.Tensor(points)
disc_map=D(points).cpu().numpy()
x=y=np.linspace(-RANGE,RANGE,N_POINTS)
cs=plt.contour(x,y,disc_map.reshape((len(x),len(y))).transpose())
plt.clabel(cs,inline=1,fontsize=10)
#draw samples
with torch.no_grad():
z=torch.randn(batchsz,2)
samples=G(z).cpu().numpy()
plt.scatter(xr[:,0],xr[:,1],c='orange',marker='.')
plt.scatter(samples[:,0],samples[:,1],c='green',marker='+')
viz.matplot(plt,win='contour',opts=dict(title='p(x):%d'%epoch))
def main():
torch.manual_seed(23)
np.random.seed(23)
data_iter=data_generator()
x=next(data_iter)
#[b,2]
# print(x.shape)
G=Generator()
D=Discriminator()
# print(G)
# print(D)
optim_G=optim.Adam(G.parameters(),lr=5e-4,betas=(0.5,0.9))
optim_D=optim.Adam(D.parameters(),lr=5e-4,betas=(0.5,0.9))
viz.line([[0,0]],[0],win='loss',opts=dict(title='loss',legend=['D','G']))
for epoch in range(50000):
for _ in range(5):
# 1.1 train on real data
#numpy
xr=next(data_iter)
xr=torch.from_numpy(xr)#.cuda()
#[b,2]=>[b,1] 1维sigmod
predr=D(xr)
# max predr
lossr=-predr.mean()
# 1.2 train on fake data
z=torch.randn(batchsz,2)
xf=G(z).detach() #tf.stop_gradient()
predf=D(xf)
lossf=predf.mean()
#aggregate all
loss_D=lossr+lossf
#optimizer
optim_D.zero_grad()
loss_D.backward()
optim_D.step()
z=torch.randn(batchsz,2)
xf=G(z)
predf=D(xf)
loss_G=-predf.mean()
#optimize
optim_G.zero_grad()
loss_G.backward()
optim_G.step()
if epoch%100==0:
viz.line([[loss_D.item(),loss_G.item()]],[epoch],win='loss',update='append')
print(loss_D.item(),loss_G.item())
generator_image(D,G,xr,epoch)
if __name__ == '__main__':
main()
WGAN
import torch
from torch import nn,optim,autograd
import numpy as np
import visdom
import random
from matplotlib import pylab as plt
h_dim=400
batchsz=512
viz=visdom.Visdom()
class Generator(nn.Module):
def __init__(self):
super(Generator, self).__init__()
self.net=nn.Sequential(
# z:[b,2]=>[b,2]
nn.Linear(2,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,2)
)
def forward(self,z):
output=self.net(z)
return output
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator, self).__init__()
self.net=nn.Sequential(
nn.Linear(2,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,1),
nn.Sigmoid()
)
def forward(self,x):
output=self.net(x)
return output.view(-1)
def data_generator():
'''
8-gaussian mixture models
:return:
'''
scale=2.
centers=[
(1,0),
(-1,0),
(0,1),
(0,-1),
(1./np.sqrt(2),1./np.sqrt(2)),
(1./np.sqrt(2),-1./np.sqrt(2)),
(-1./np.sqrt(2),1./np.sqrt(2)),
(-1./np.sqrt(2),-1./np.sqrt(2))
]
centers=[(scale*x,scale*y)for x,y in centers]
while True:
dataset=[]
for i in range(batchsz):
point=np.random.randn(2)*0.02
center=random.choice(centers)
#N(0,1)+center_x1/x2
point[0]+=center[0]
point[1] += center[1]
dataset.append(point)
dataset=np.array(dataset).astype(np.float32)
dataset/=1.414
yield dataset
def generator_image(D,G,xr,epoch):
'''
Generator and saves a plot of the true distribution,the generator and the cr itic
'''
N_POINTS=128
RANGE=3
plt.clf()
points=np.zeros((N_POINTS,N_POINTS,2),dtype='float32')
points[:,:,0]=np.linspace(-RANGE,RANGE,N_POINTS)[:,None]
points[:,:,1]=np.linspace(-RANGE,RANGE,N_POINTS)[None,:]
points=points.reshape((-1,2))
#[16384,2]
#print('p:',points.shape)
#draw contour
with torch.no_grad():
points=torch.Tensor(points)
disc_map=D(points).cpu().numpy()
x=y=np.linspace(-RANGE,RANGE,N_POINTS)
cs=plt.contour(x,y,disc_map.reshape((len(x),len(y))).transpose())
plt.clabel(cs,inline=1,fontsize=10)
#draw samples
with torch.no_grad():
z=torch.randn(batchsz,2)
samples=G(z).cpu().numpy()
plt.scatter(xr[:,0],xr[:,1],c='orange',marker='.')
plt.scatter(samples[:,0],samples[:,1],c='green',marker='+')
viz.matplot(plt,win='contour',opts=dict(title='p(x):%d'%epoch))
def gradient_penalty(D,xr,xf):
'''
:param D:
:param xr:[b,2]
:param xf:[b,2]
:return:
'''
#[b,1]
t=torch.rand(batchsz,1)
#[b,2]=>[b,2]
t=t.expand_as(xr)
#interpolation
mid=t*xr+(1-t)*xf
#set it requires gradient
mid.requires_grad_()
pred=D(mid)
grads=autograd.grad(outputs=pred,inputs=mid,
grad_outputs=torch.ones_like(pred),
create_graph=True,retain_graph=True,only_inputs=True)[0]
gp=torch.pow(grads.norm(2,dim=1)-1,2).mean()
return gp
def main():
torch.manual_seed(23)
np.random.seed(23)
data_iter=data_generator()
x=next(data_iter)
#[b,2]
# print(x.shape)
G=Generator()
D=Discriminator()
# print(G)
# print(D)
optim_G=optim.Adam(G.parameters(),lr=5e-4,betas=(0.5,0.9))
optim_D=optim.Adam(D.parameters(),lr=5e-4,betas=(0.5,0.9))
viz.line([[0,0]],[0],win='loss',opts=dict(title='loss',legend=['D','G']))
for epoch in range(50000):
for _ in range(5):
# 1.1 train on real data
#numpy
xr=next(data_iter)
xr=torch.from_numpy(xr)#.cuda()
#[b,2]=>[b,1] 1维sigmod
predr=D(xr)
# max predr
lossr=-predr.mean()
# 1.2 train on fake data
z=torch.randn(batchsz,2)
xf=G(z).detach() #tf.stop_gradient()
predf=D(xf)
lossf=predf.mean()
# 1.3 gradient penalty
gp=gradient_penalty(D,xr,xf)
#aggregate all
loss_D=lossr+lossf+0.2*gp
#optimizer
optim_D.zero_grad()
loss_D.backward()
optim_D.step()
z=torch.randn(batchsz,2)
xf=G(z)
predf=D(xf)
loss_G=-predf.mean()
#optimize
optim_G.zero_grad()
loss_G.backward()
optim_G.step()
if epoch%100==0:
viz.line([[loss_D.item(),loss_G.item()]],[epoch],win='loss',update='append')
print(loss_D.item(),loss_G.item())
generator_image(D,G,xr,epoch)
if __name__ == '__main__':
main()