文献阅读-轨道不平顺信息用于列车定位
对了,我最近开通了微信公众号,计划是两边会同步更新,并逐步的会将博客上的文章同步至公众号中。感兴趣的朋友可以搜索“里先森sements”来关注,欢迎来玩~!
近期拜读了武汉大学牛小骥教授团队的两篇关于轨道不平顺信息用于列车定位的研究文献,未免遗忘,在此对文献中的重点进行梳理。本文将围绕个人对轨道不平顺信息匹配定位的几点疑惑,着重梳理作者是如何从现象到本质去挖掘其中的学术问题,并成功运用这一特性,开辟一条新的应用领域。受限个人学术能力,理解必有疏漏,学术问题请以原文为准。
1 - 文献基本信息
《Experimental Study on the Potential of Vehicle’s Attitude Response to Railway Track Irregularity in Precise Train Localization》
- 期刊:IEEE Transactions on Intelligent Transportation Systems
- 2022 IF:9.551
- 中科院 1 区,JCR Q1
- Manuscript received April 12, 2021; revised October 17, 2021, January 10, 2022, and April 7, 2022; accepted May 9, 2022.
《Onboard Train Localization Based on Railway Track Irregularity Matching》
- 期刊:IEEE Transactions on Instrumentation and Measurement
- 2022 IF:5.332
- 中科院2区,JCR Q1
- Manuscript received December 11, 2021; accepted January 5, 2022. Date of publication January 18, 2022
在较早提交的 《Experimental Study…》 中,作者基于实际的测试数据,提出了利用轨道不平顺对车辆姿态造成的微弱影响进行定位的概念以及实施框架,并比较了其与现有列车定位方案的优劣。较晚提交的《Onboard Train…》则阐明了轨道不平顺信息匹配与惯导系统联合的定位方案细节,分析了结合之后的定位效果。在这两篇文献中,核心思想都是将轨道不平顺造成的列车姿态实时变化特征与预先采集好的数据库进行匹配,得到较为精准的列车在轨道上的绝对位置信息,并利用该位置信息修正惯导系统的漂移。
2 - 阅读之前的问题
在阅读作者团队的微信公众号文章 (创新成果分享:“变废为宝”——铁路轨道不平顺信号用于列车精密匹配定位: https://mp.weixin.qq.com/s/OGU_lp488FIGFNtGlUdojA) 并大致涉猎了一下两篇文献的摘要后,对于这种新颖的列车定位方法产生了一些疑惑。在后续的行文与分析中,将着重围绕着这些疑惑进行展开。
- 轨道不平顺信息可靠嘛?是否会随着列车运行以及后期检修而出现变化
- 使用什么方法将当前的姿态特征与数据库中的特征进行匹配
- 为了实现这个目标,需要使用多好的传感器
- 在结合惯导之前,单纯依靠轨道不平顺匹配能够得到多高的定位精度
- 如何将轨道不平顺信息与惯导进行结合,结合后的定位精度如何
3 - 轨道不平顺定位
3.1 - 实验环境
在较早投递的《Experimental Study…》 论文中,作者通过案例分析 (case study) 的方式对轨道不平顺定位的利用价值展开研究。作者在一辆检修列车上安置了多个不同等级的 GNSS/INS 组合导航设备,并让列车在一段 12KM 长的开阔轨道上进行了多次往复运行实验。实验过程中,列车在轨道上的位置真值由额外架设的定位基站测量获取。列车上安放的 GNSS/INS 组合导航设备主要分为三类:导航级——POS-A15、战术级——POS-320、MEMS——INS-Probe。其中,POS-A15、POS-320 以及一台 INS-Probe 被安放在了车厢中,一台 INS-Probe 被安放在了列车转向架上。

POS-A15 与 POS-320 都为商用整机,可直接获取内部解析出的姿态数据;INS-Probe 为作者团队自行制作的 GNSS/INS 组合导航设备,在这个设备中,使用 ADI 公司的 MEMS IMU ——ADI16465 获取加速度与角速度信息,u-blox 接收机获取 GNSS 定位信息。实验过程中所使用到的设备详细参数如下:
| 设备名称 | 参数信息 |
|---|---|
| POS-A15 | Navigation-grade GNSS/INS integrated system Gyroscope in-run bias stability: 0.01 d e g / h 0.01 deg/h 0.01deg/h Angular random walk: 0.0022 d e g / h 0.0022 deg/\sqrt{h} 0.0022deg/h Accelerometer in-run bias stability: 10 m G a l 10 mGal 10mGal Velocity random walk: 0.00075 m / s / h 0.00075 m/s/\sqrt{h} 0.00075m/s/h |
| POS-320 | Tactical-grade GNSS/INS integrated system Gyroscope in-run bias stability: 0.25 d e g / h 0.25 deg/h 0.25deg/h Angular random walk: 0.1 d e g / h 0.1 deg/\sqrt{h} 0.1deg/h Accelerometer in-run bias stability: 300 m G a l 300 mGal 300mGal Velocity random walk:$ 0.03 m/s/\sqrt{h}$ |
| INS-Probe | MEMS IMU, ADI16465 Gyroscope in-run bias stability: 40 d e g / h 40 deg/h 40deg/h Angular random walk:$ 0.3 deg/\sqrt{h}$ Accelerometer in-run bias stability: 1000 m G a l 1000 mGal 1000mGal Velocity random walk: 0.1 m / s / h 0.1 m/s/\sqrt{h} 0.1m/s/h |
| Trimble NetR9 | GNSS base station receiver Sampling rate: up to 50 Hz (configurable) RTK surveying performance: horizontal 8 mm + 1 ppm RMS vertical 15 mm + 1 ppm RMS |
| GNSS antenna | NovAtel GPS-702-GGL Signals tracked: GPS L1/L2, GLONASS L1/L2, L-band, BDS B1, Galileo E1 |
搭载有测量设备的列车在同一轨道上往复行进了六次。其中,第 1 至第 4 次列车行进速度相同,约 20m/s。第5、6次则降速至约 15m/s。

3.2 - 轨道不平顺与列车姿态特征
作者在论文《Experimental Study…》中展示了利用轨检小车在同一段轨道进行三次独立测量后的横向偏差数据。从数据上可以看出轨道不平顺是客观存在的,并且说明了在短时间内同一段轨道上的不平顺数据拥有良好的可复现性。

那么,直接记录 IMU 输出的各轴向上的加速度与角速度值,并在数据库中寻找匹配段就可以了吗?实则不然,相比于直接使用 IMU 输出的各项数值来做匹配,使用惯性导航系统 (或者其他算法) 解算出的姿态信息进行匹配可以得到更高的准确率。这是因为姿态信息不仅与当前角速度、加速度有关,其还引入了历史信息约束。从瞬时来看,可能在轨道上的某两个点位会产生相似的角速度与加速度,但在这两个点位产生相似的姿态则相对来说概率要小得多。在《Onboard Train…》论文中,作者对比了仅使用加速度、角速度或者姿态角来进行匹配的正确率。试验结果表明,使用姿态角的匹配正确率要远高于使用加速度或角速度进行匹配的结果。

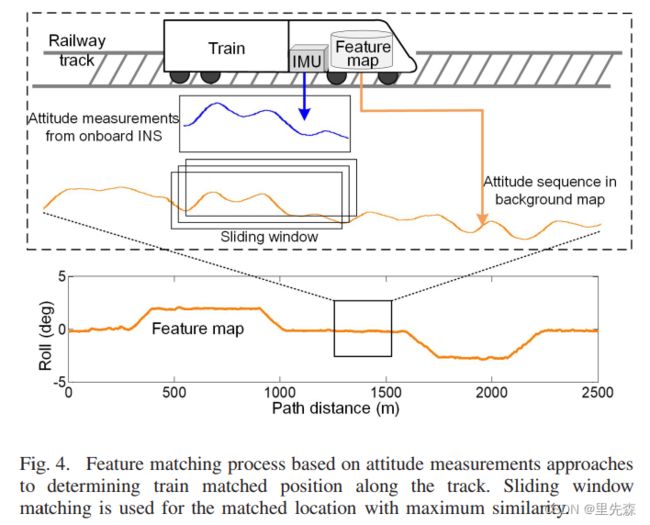
在《Experimental Study…》与《Onboard Train…》论文中,作者分别展示了几段列车行驶过程中的姿态变化数据。从这些数据曲线中我们看到:第一,轨道不平顺对于列车姿态的影响在同一轨道段上具有较高的可复现性;第二,即使在不同的行驶速率下,在同一轨道段,轨道不平顺依旧能够造成相似的列车姿态变化;第三,相较于航向角 (Heading) ,俯仰角 (Pitch) 与横滚角 (Roll) 的变化曲线受列车速率的影响较小,更适用于与数据库中的既有数据进行定位匹配。


上述的实验数据证明了轨道不平顺信息在短期内具有较高的可复现性,受铺设环境影响,轨道上各个距离段内往往具有较为明显的不平顺差异。即使是在距离相近的并线轨道上,两两之间也存在着较为明显的区别。然而,列车轨道并非一成不变的,其可能会受周遭环境以及捣固的影响而发生变化,这必然会对影响到轨道原有的不平顺信息。
在论文《Experimental Study…》中,作者引用参考文献,说明列车轨道不平顺特征从长期来看是稳定且不易随时间与列车运行而产生较大变化的。而对于轨道捣固或其他因素造成的轨道变化,作者提出可以通过在大量的运行列车上搭载传感器,实时更新轨道不平顺信息数据库,尽可能避免其对轨道不平顺信息匹配定位造成的误差。
Track irregularity textures are stable and change slowly with time, especially for the ballastless slab track, for example, which is to a large extent maintenance free [29, p.261-263], only small track irregularity change may occur over a year or even longer period of time.
We provide several possible strategies that may release the problem in data source for map construction and update: 1) The track geometric and irregularity measurement information in the railway construction phase can be used as the initial map. This method is quite practical for a high-speed line. 2) Dedicated track geometry condition inspection vehicles can be used to create and update the existing track irregularity map. 3) In the future, any in-service train equipped with a track irregularity sensing system or sensors can be used to collect related information and update the map via a crowdsourcing approach.
上述对轨道不平顺信息的短期可靠性以及数据库的长期维护方案论证,为利用轨道不平顺信息进行列车定位奠定了理论基础。
3.3 - 如何定位/定位精度/传感器精度的影响
关于如何将实时采集的轨道不平顺特征 (也即轨道不平顺造成的列车姿态特征) 与数据库中的记录进行匹配,作者提出可以取实际测量的一段数据 x x x,在数据库中用滑动窗口的方式取另一段数据 y y y,计算两者间的皮尔森线性相关系数。全部比较完毕后,取相关系数最高的位置作为当前列车的位置。皮尔森相关系数 r x y r_{xy} rxy 可以通过下式进行计算:
r x y = ∑ i = 1 m ( x i − x ^ ) ( y i − y ^ ) ∑ i = 1 m ( x i − x ^ ) 2 ∑ i = 1 m ( y i − y ^ ) 2 r_{xy}=\frac{\sum_{i=1}^{m}(x_i-\hat{x})(y_i-\hat{y})}{\sqrt{\sum_{i=1}^{m}(x_i-\hat{x})^2}\sqrt{\sum_{i=1}^{m}(y_i-\hat{y})^2}} rxy=∑i=1m(xi−x^)2∑i=1m(yi−y^)2∑i=1m(xi−x^)(yi−y^)
式中, m m m 为序列长度, x i x_i xi 与 y i y_i yi 分别代表序列 x x x 与序列 y y y 中的第 i i i 个数据点。 x ^ \hat{x} x^ 与 y ^ \hat{y} y^ 分别代表序列 x x x 与序列 y y y 的算数平均值。可以看到,在这种方案下,对于确定的序列 x x x 和 y y y ,序列长度 m m m 的选取将直接影响到最终的相关系数 r x y r_{xy} rxy 。若序列长度选取过短,可能会因为相似的特征而得到错误的匹配结果;若序列长度选取过长,则可能会因为测量过程中的噪声而无法在正确的位置上计算出较高的相关度。此外,传感器的精度,以及构建数据库与实际使用时的传感器精度差异是否会对皮尔森相关系数的求取造成影响,都是尚需回答的问题。
为此,作者设计了下述试验;以第一轮运行 (run1) 过程中,中等精度的惯导系统 (POS-320) 输出的姿态信息作为数据库中的匹配模板,对后续运行过程中安装在车厢中的 POS-A15、POS-320、INS-Probe 以及安装在转向架上的 INS-Probe 数据取不同的序列长度,查看其与模板匹配后的误差变化趋势。其中,POS-A15 的精度要高于作为匹配模板提供者的 POS-320,INS-Probe 的精度则低于 POS-320,图表中的纵轴为匹配位置结果与实际位置结果的均方根误差。
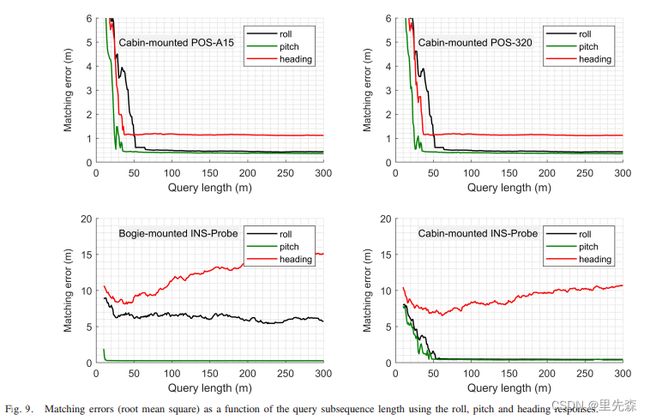
从图中我们可以看到,相比于航向角 (Heading) ,使用俯仰角 (Pitch) 与横滚角 (Roll) 进行匹配能够得到更好的结果 (参考文献:S. Hong, H.-H. Chun, S.-H. Kwon, and M. H. Lee, “Observability measures and their application to GPS/INS,” IEEE Trans. Veh. Technol., vol. 57, no. 1, pp. 97–106, Jan. 2008 )。而作者在论文《Onboard Train…》中指出可以不止考虑使用某一个姿态角进行匹配,而是将所有的姿态角转化为一个特征向量去进行整体的匹配,相对可以得到更好的匹配结果。但这一点仅适用于较高成本的惯导系统 (POS-A15、POS-320),并且要求其与提供数据库中数据的传感器安放在类似位置。注意到图中的低成本惯导 (INS-Probe) 数据,安放在转向架上的传感器由于与车厢具有不同的对轨道不平顺的响应,因此拉长匹配序列长度也难以让匹配误差收敛到一个令人满意的值。此外,对于低成本惯导系统,使用朝向角进行匹配是不可靠的,将其引入进行匹配反而会扩大误差。
从固定在车厢中的 INS-Prob 惯导数据中我们也可以看出,理想情况下,单纯依靠轨道不平顺匹配可以达到 0.4 米 (RMS) 左右的列车轨道绝对定位精度。对于三种精度的惯导系统,序列长度增加到 50 米左右大多都可收敛到其最高精度。但值得注意的是,低成本惯导 (INS-Probe) 拥有更快且更好的收敛效果。这可能源于低成本惯导对于轨道上的细微震动不敏感从而柔化了部分噪声所带来的影响,设想若对中、高成本的惯导数据进行类似的预处理,也可能得到相似或更好的结果。此外,作者在论文《Onboard Train…》中利用统计实验的方法证明了对于战术级精度的 POS-320 惯导系统,匹配序列长度设为与车辆每秒前进距离相同即可得到令人满意的匹配精度。对于上述实验场景,这个距离为 20米。
另外,作者还使用 POS-320 与固定在车厢内的 INS-Probe 数据在全程比较了两种不同精度惯导所得数据的匹配情况。在这部分的实验过程中,序列长度被固定为 100 米。


其中,run1、3、5 为同一运行方向,run 2、4、6 为列车反向运行,不同运行次数时列车的运行速率不同。可以看出,在与数据库中的数据以相同方向运行时,不同精度的惯导对于轨道不平顺信息定位的结果影响不大,尤其是当结合所有姿态角进行匹配后,这一差距将进一步的缩减。但当列车运行方向与数据库中的数据相反时,匹配误差将会明显增加。
3.4 - 如何结合惯导
使用轨道不平顺信息匹配定位虽然能够得到较高精度的绝对位置,但其一大痛点是不能长期维持在最高精度。从上述实验结果我们也可以看到,单纯依靠轨道不平顺匹配的定位精度是通过均方根误差计算得来,并且轨道不平顺信息匹配定位的精度会在一定范围内产生波动。显然,仅依靠轨道不平顺信息匹配进行定位在强调安全性的列车定位背景下是有待商榷的。

为此,作者提出将轨道不平顺匹配定位与惯导定位进行结合,取长补短。轨道不平顺信息匹配定位得到的绝对位置信息可以用来修正惯导长期工作所产生的漂移,而惯导的高可靠性可以弥补轨道不平顺信息匹配定位的精度不稳定问题,卡尔曼滤波器则被应用于融合两者的定位信息。为了避免轨道不平顺信息匹配时的错误定位影响惯导推算,在论文《Onboard Train…》中,作者提出使用一种阈值比较方法来决定何时轨道不平顺信息匹配定位的数据是有效的。这种被作者称为 self-evaluation 的阈值判定方法如下式所示:
Δ p s = ∣ s I N S − s m a t c h e d ∣ < T h s \Delta{p_s}=|s_{INS}-s_{matched}|
其中, s I N S s_{INS} sINS 与 s m a t c h e d s_{matched} smatched 分别表示惯导系统与轨道不平顺信息匹配输出的位置。当这两者的定位差异 Δ p s \Delta{p_s} Δps 大于预设的阈值 T h s Th_s Ths 时,轨道不平顺信息匹配定位才会真正介入,修正惯导系统的漂移。关于阈值 T h s Th_s Ths 的取值,作者提出可以根据经验与系统机械编排确定好系统误差协方差矩阵 P P P 中各元素的值,而后从中提取惯导系统的理论标准差—— σ r N \sigma _{r_N} σrN 与 σ r E \sigma _{r_E} σrE ,并按照下式计算阈值 T h s Th_s Ths:
T h s = 3 ∗ σ r N 2 + σ r E 2 Th_s=3*\sqrt{{\sigma _{r_N}^2}+{\sigma _{r_E}^2}} Ths=3∗σrN2+σrE2
阅读至此我产生了些许疑惑,也有可能是我在阅读论文时有所疏漏,在此仅作探讨。从前文作者将序列长度固定为 100 米的全程实验中我们可以发现,轨道不平顺信息匹配定位的误差是不稳定的。部分情况下 (例如与作为匹配模板的数据呈反向运行时) ,其定位误差最高可达3米,最低时则接近真值。而作者引入的 self-evaluation 方法仅使用固定阈值来判定是否要激活轨道不平顺信息匹配的定位信息,那么是否会存在这样的情况:惯导系统当前并未产生较大的漂移,而列车恰好从轨道不平顺最优匹配位置运动到了最差匹配位置,即其定位误差从与真值十分接近跳变至 3 米左右。在这种情况下,势必会触发 self-evaluation,使得原意用于修正惯导的外部信息变为扰乱惯导的外部噪声。相信寻求一种更为灵活的 self-evaluation 方法在某种程度上可以尽可能的规避上述情况的发生。
在《Experimental Study…》中,作者给出了融合方法与目前常用的列车轨道定位方法效果对比数据,如下表所示:
| Method | RMS (m) | 95% (m) | 99.7% (m) |
|---|---|---|---|
| SPP/INS | 1.89 | 3.31 | 3.78 |
| DGNSS/INS | 0.44 | 0.85 | 1.42 |
| matching only | 0.39 | 0.69 | 0.96 |
| INS/matching | 0.37 | 0.78 | 1.00 |
从试验结果来看,仅依靠轨道不平顺信息匹配定位的效果是最优的,且能直接获取到列车当前的绝对位置。但其定位精度不能稳定持续,必须与惯导结合以取长补短。结合轨道不平顺信息匹配定位后的惯导定位拥有与差分 GNSS (DGNSS, 相比于 RTK,基站发送观察到的和计算出的伪距之间的差异) 近似的定位精度,并且不会受到桥梁、隧道等 GNSS 封闭区的干扰。
3.5 - 小结
《Experimental Study on the Potential of Vehicle’s Attitude Response to Railway Track Irregularity in Precise Train Localization》
- 利用皮尔森系数来比较当前轨道不平顺特征与数据库中的匹配度
- pitch(俯仰角)和roll(滚转角)更适用于轨道不平顺定位(参考文献33)
- 低成本IMU在轨道不平顺定位上效果更好,因为它们相比贵的IMU,对细微的干扰更不敏感,因此匹配时更容易找到位置
- 装在转向架上的IMU使用roll(滚转角)来做轨道不平顺定位时,即使加长query length(匹配长度)误差也不容易降低,这主要是转向架和客舱对轨道不平顺的动态姿态响应不同。
- 构建特征数据库的IMU精度与实时采集时的IMU精度对匹配结果的影响不大(P8 Fig10)。
- 轨道不平顺匹配与INS结合后的位置误差与单纯轨道不平顺匹配效果差不多,甚至略差。但结合是必须的,单依靠轨道不平顺匹配无法保证持续的高精度。
- 使用低成本的IMU匹配效果更好,单依靠低成本IMU来匹配准确度可达0.4M(RMS)。
- 查询长度达到50m时,所有IMU传感器都可以收敛到最高准确度,低成本IMU收敛到最高准确度所需的查询距离要更短。
《Onboard Train Localization Based on Railway Track Irregularity Matching》
- 引入不平顺匹配的主要目的,是将其作为外部观测量,在卡尔曼滤波中修正INS的漂移
- 将采集到的惯导原始数据转换为姿态后用于轨道不平顺匹配时,相比于直接用惯导原始数据(加速度、角速度)的匹配准确度要高。(这很自然,因为姿态与先前的角速度加速度也有关联);
- 根据INS导航提供的位置确定大致的搜索范围,通过皮尔森系数确定匹配度;
- 通过统计法得到对于 20M/s 运动的列车,使用 20 米的 Sample length 即可;
- 使用卡尔曼滤波来融合INS和轨道不平顺匹配的位置结果,仅当INS推断的位置与不平顺匹配得到的位置相差超过一定阈值之后,不平顺匹配的位置才会介入卡尔曼滤波作用,这是为了避免错误的位置匹配对定位结果的影响。文中也给出确定阈值的方法。(但若是不平顺匹配的位置与真值瞬时误差过大呢?在实验中是可以看到不平顺匹配的误差有超过 3 米的时候);
- 卡尔曼滤波器中的测量噪声是在经验值的基础上扩大得到的;
- 在先前的文章中得到单靠低成本IMU的不平顺匹配就可以得到 0.4 的准确度,不平顺匹配与 INS 结合后能得到 0.6 的准确度。看似精度反而降低,但实际应用中,仅依赖轨道不平顺不可行,轨道不平顺匹配位置不能恒定的保持高精度,会有跳变。