Lattice Planner从学习到放弃(二):二次规划的应用与调试
前言
一.静态障碍物的引入
二.单车道场景中面向静态障碍物的避让
1.轨迹规划
2.轨迹实车执行效果之失败案例
三、调试过程记录
1.代码缺失与完善
2.参数的调整
总结
前言
前情提要:Lattice Planner从学习到放弃
盲目激情的移植apollo的lattice,体会到了痛苦,当时为了先尽快让lattice算法在自己的框架里跑起来,在摘用源码的时候做了很多欠考虑的改动,虽然快速实现了通过lattice planner规划轨迹,然后达到循迹的效果,但是在随后引入障碍物,产生了大量的坑,深深的被教育,也给带头大哥添了不少麻烦。
看懂流程==>理解原理 ==>成功实现
最终通过planner中的二次规划实现了单车道内低速障碍物的避让规划。
简明扼要:添加静态障碍物→产生单车道内目标轨迹→绕行或停止
最近节奏比较撕裂,下午或晚上才能搞lattice的复现,但这个“重复造轮子”的过程真的获益良多,和大哥们交流也多起来,知道好的轮子是什么样的,才能尝试去改进或完善,一瓶不响半瓶咣当,半瓶正是在下~保持积极与热情,也期待大佬们各种指导....
一.静态障碍物的引入
1.障碍物的格式
暂时不使用Apollo的那套,先用自有结构体接收障碍物信息,然后压入Obstacle类中即可。
对于静态或低速障碍物,无非就是id、长宽高、位置以及朝向,动态障碍物暂时没有进行。
2.自车sl的建立和障碍物的建立
自车相对于参考线起点里程和横向偏移量,以及障碍物的ST、SL信息都是要计算的,对于动态障碍物,SL已经不足以满足需求了吧?后续学习EM再拎出来分析。
二.单车道场景中面向静态障碍物的避让
1.轨迹规划原理
轨迹=纵向轨迹+横向轨迹,之前已经分析了纵向速度规划的过程,以及横纵向轨迹是如何combine成一条完整轨迹的。在lattice中,横向轨迹生成有两种方法:撒点采样法、二次规划法。
1.1基于采样点的轨迹规划

撒点法前边也有记录,知道了起始点和采样点的![]() ,然后求解对应的五次多项式的系数,便可得到对应的横向轨迹,不重复了。
,然后求解对应的五次多项式的系数,便可得到对应的横向轨迹,不重复了。
1.2基于二次规划的轨迹规划
Apollo源码中FLAGS_lateral_optimization默认是开启的,即横向规划默认使用二次规划进行,由于个人鲁莽认为撒点会更直观简洁,所以关了这个标志位,采用的是撒点采样,随后在实车调试时发现耗时很大,尤其是自车接近障碍物时,耗时飙升——轨迹数太多,障碍物碰撞检测遍历轨迹。额,配置比较低的工控机雪上加霜...然后试用一下二次规划呗,wtf,超nice。
学习了程十三的轨迹规划综述。
Apollo中二次规划求解使用的是OSQP求解器,官网:OSQP官网点这里 ,二次规划求解有很多方法,关于为何选取OSQP,速度快~为何这么快,数学系的大佬们的战场。标准的二次规划形式:

下来要做的就很明确了:
- 搞清楚路径规划的约束;
- 搞清楚优化目标,即如何评价计算结果的优劣
- 转换成osqp求解器需要的形式,调用求解器
- 坐等结果~
考虑车宽以及和障碍物的距离buffer,车辆的中心的横向可移动范围大概就是如下图,Apollo中,前探60m,采样点间隔1m,所以有60个采样点,也可以根据实际情况调整。

1.2.1 车辆横向状态量设计
横向偏移量 作为基本量,跑不掉,
作为基本量,跑不掉,![]() 作为横向速度变化率,当然也跑不掉;
作为横向速度变化率,当然也跑不掉;![]() 作为横向加加速度,是控制乘坐舒适性的重要指标,也不能放掉;对于
作为横向加加速度,是控制乘坐舒适性的重要指标,也不能放掉;对于![]() ,把轨迹看作可拉伸的弹力绳,三阶导意味着其可拉伸的程度,可以用
,把轨迹看作可拉伸的弹力绳,三阶导意味着其可拉伸的程度,可以用![]() 差分计算。so,需要的量齐全了。状态量可以得到:
差分计算。so,需要的量齐全了。状态量可以得到:
![]()
1.2.2 车辆横向轨迹约束的建立
整个约束建立主要考虑到:
1.自车不能与障碍物碰撞或驶出边界,即![]()
2.轨迹应该保持连续,即相邻两个采样点的![]()
3.轨迹应该保持光滑,即导数连续相邻两个采样点的斜率![]()
4.横向加加速度(相对于s的二阶偏导)应在一定范围内,即![]()
公式2、3直接用的泰勒公式进行的2阶和3阶展开,将![]() 代入,可得到公式2和3的最终形式:
代入,可得到公式2和3的最终形式:
到这一步,基本上约束的内容已经很清晰了,整理后如下:
即对于每一个采样点,存在两个不等式和两个等式约束,一共60个采样点,那么约束至少应该为60x4=240个约束条件。
根据状态量的形式,约束矩阵 也就定了(这里不一定准确,若有不对求指导额..):
也就定了(这里不一定准确,若有不对求指导额..):

这里使用的话貌似应该是![]() ,行列貌似反了...其实转置以后应该长这样:
,行列貌似反了...其实转置以后应该长这样:

1.2.3 约束边界的建立
前边已经描述了约束的建立依据,根据障碍物对车道的侵占情况,更新横向位移 的范围,最终约束的上下边界分别为:
的范围,最终约束的上下边界分别为:
![]()
![]()
其中-2,2作为缺省值不充值,凑够矩阵运算数量,最终用于:
![]()
1.2.4 目标函数的建立
二次规划的目标为
![]()
其中,将权重作为P项对角阵传入,左右边界作为偏差项q用以控制轨迹和参考线的偏离程度,如下:
![]()
至此,整个二次规划建立所需要的材料,全部齐全。在二次规划中,对于矩阵P,以目前形式来看一定是正定的额,是否意味着此问题是凸优化问题,且一定有可行解?求大佬指点。。。
1.2.5 约束矩阵的压缩CSC
从上边已经可以看到,建立起来的矩阵基本都非常稀疏,在运算过程中是非常不方便的,常见的稀疏矩阵压缩方法主要有:
- CSR—Compressed sparse row
- CSC—Compressed sparse column
之前在学习apollo时,发现其采用的csc矩阵,当时并不了解,也是扩展后才知道,可见总结:csc_matrix稀疏矩阵理解 至于为何选择csc的原因可能是osqp官方使用的是csc?调用osqp建立workspace,需要以csc矩阵形式传入求解器。
闲话一大堆,下面上代码。
2.Lattice planning二次规划代码实现
lattice planner中通过调用Trajectory1dGenerator实例化后的成员函数,生成横纵向轨迹,我们要看的常规撒点法和二次规划都在其中,
// 5. generate 1d trajectory bundle for longitudinal and lateral respectively.
Trajectory1dGenerator trajectory1d_generator(
init_s, init_d, ptr_path_time_graph, ptr_prediction_querier);
std::vector> lon_trajectory1d_bundle;
std::vector> lat_trajectory1d_bundle;
trajectory1d_generator.GenerateTrajectoryBundles(
planning_target, &lon_trajectory1d_bundle, &lat_trajectory1d_bundle);
进入函数后,很清晰没啥说的:纵向规划+横向规划。
void Trajectory1dGenerator::GenerateTrajectoryBundles(
const PlanningTarget& planning_target,
Trajectory1DBundle* ptr_lon_trajectory_bundle,
Trajectory1DBundle* ptr_lat_trajectory_bundle) {
//纵向速度规划
GenerateLongitudinalTrajectoryBundle(planning_target,
ptr_lon_trajectory_bundle);
//横向轨迹规划
GenerateLateralTrajectoryBundle(ptr_lat_trajectory_bundle);
}在横向规划内,通过宏定义FLAGS_lateral_optimization,决定是否采用二次规划,如下:
void Trajectory1dGenerator::GenerateLateralTrajectoryBundle(
Trajectory1DBundle* ptr_lat_trajectory_bundle) const {
//是否使用优化轨迹,true,采用五次多项式规划
if (!FLAGS_lateral_optimization) {
auto end_conditions = end_condition_sampler_.SampleLatEndConditions();
// Use the common function to generate trajectory bundles.
GenerateTrajectory1DBundle<5>(init_lat_state_, end_conditions,
ptr_lat_trajectory_bundle);
} else {
double s_min = init_lon_state_[0];
double s_max = s_min + FLAGS_max_s_lateral_optimization;//FLAGS_max_s_lateral_optimization = 60
double delta_s = FLAGS_default_delta_s_lateral_optimization;//规划间隔为1m
//横向边界
auto lateral_bounds =
ptr_path_time_graph_->GetLateralBounds(s_min, s_max, delta_s);
// LateralTrajectoryOptimizer lateral_optimizer;
std::unique_ptr lateral_optimizer(
new LateralOSQPOptimizer);
// 采用的是OSQP求解器
lateral_optimizer->optimize(init_lat_state_, delta_s, lateral_bounds);
auto lateral_trajectory = lateral_optimizer->GetOptimalTrajectory();
ptr_lat_trajectory_bundle->push_back(
std::make_shared(lateral_trajectory));
}
} 流程很直白,通过GetLateralBounds函数获取包含障碍物信息的横向边界分布,然后传入lateral_optimizer->optimize()中开始osqp短暂愉快的一生,

完整源码可看apollo:
bool LateralOSQPOptimizer::optimize(
const std::array& d_state, const double delta_s,
const std::vector>& d_bounds) {
std::vector P_data;
std::vector P_indices;
std::vector P_indptr;
//建立目标函数中的P矩阵,主要包括权重分配
CalculateKernel(d_bounds, &P_data, &P_indices, &P_indptr);
delta_s_ = delta_s; //1m
const int num_var = static_cast(d_bounds.size());
const int kNumParam = 3 * static_cast(d_bounds.size());
const int kNumConstraint = kNumParam + 3 * (num_var - 1) + 3;
c_float lower_bounds[kNumConstraint];
c_float upper_bounds[kNumConstraint];
const int prime_offset = num_var;
const int pprime_offset = 2 * num_var;//=6?
std::vector>> columns;
columns.resize(kNumParam);
int constraint_index = 0;
//constraint_index:0~2
// d_i+1'' - d_i''
for (int i = 0; i + 1 < num_var; ++i) {
columns[pprime_offset + i].emplace_back(constraint_index, -1.0);
columns[pprime_offset + i + 1].emplace_back(constraint_index, 1.0);
//FLAGS_lateral_third_order_derivative_max=0.1
lower_bounds[constraint_index] =
-FLAGS_lateral_third_order_derivative_max * delta_s_;
upper_bounds[constraint_index] =
FLAGS_lateral_third_order_derivative_max * delta_s_;
++constraint_index;
}
//constraint_index:3~5
// d_i+1' - d_i' - 0.5 * ds * (d_i'' + d_i+1'')
for (int i = 0; i + 1 < num_var; ++i) {
columns[prime_offset + i].emplace_back(constraint_index, -1.0);
columns[prime_offset + i + 1].emplace_back(constraint_index, 1.0);
columns[pprime_offset + i].emplace_back(constraint_index, -0.5 * delta_s_);
columns[pprime_offset + i + 1].emplace_back(constraint_index,
-0.5 * delta_s_);
lower_bounds[constraint_index] = 0.0;
upper_bounds[constraint_index] = 0.0;
++constraint_index;
}
//constraint_index:6~8
// d_i+1 - d_i - d_i' * ds - 1/3 * d_i'' * ds^2 - 1/6 * d_i+1'' * ds^2
for (int i = 0; i + 1 < num_var; ++i) {
columns[i].emplace_back(constraint_index, -1.0);
columns[i + 1].emplace_back(constraint_index, 1.0);
columns[prime_offset + i].emplace_back(constraint_index, -delta_s_);
columns[pprime_offset + i].emplace_back(constraint_index,
-delta_s_ * delta_s_ / 3.0);
columns[pprime_offset + i + 1].emplace_back(constraint_index,
-delta_s_ * delta_s_ / 6.0);
lower_bounds[constraint_index] = 0.0;
upper_bounds[constraint_index] = 0.0;
++constraint_index;
}
columns[0].emplace_back(constraint_index, 1.0);
lower_bounds[constraint_index] = d_state[0];//d
upper_bounds[constraint_index] = d_state[0];
++constraint_index;
columns[prime_offset].emplace_back(constraint_index, 1.0);
lower_bounds[constraint_index] = d_state[1];//d'
upper_bounds[constraint_index] = d_state[1];
++constraint_index;
columns[pprime_offset].emplace_back(constraint_index, 1.0);
lower_bounds[constraint_index] = d_state[2];//d''
upper_bounds[constraint_index] = d_state[2];
++constraint_index;
const double LARGE_VALUE = 2.0;
for (int i = 0; i < kNumParam; ++i) {
columns[i].emplace_back(constraint_index, 1.0);
if (i < num_var) {
lower_bounds[constraint_index] = d_bounds[i].first;
upper_bounds[constraint_index] = d_bounds[i].second;
} else {
lower_bounds[constraint_index] = -LARGE_VALUE;
upper_bounds[constraint_index] = LARGE_VALUE;
}
++constraint_index;
}
CHECK_EQ(constraint_index, kNumConstraint);
// change affine_constraint to CSC format
std::vector A_data;
std::vector A_indices;
std::vector A_indptr;
int ind_p = 0;
for (int j = 0; j < kNumParam; ++j) {
A_indptr.push_back(ind_p);
for (const auto& row_data_pair : columns[j]) {
A_data.push_back(row_data_pair.second);
A_indices.push_back(row_data_pair.first);
++ind_p;
}
}
A_indptr.push_back(ind_p);
// offset
double q[kNumParam];
for (int i = 0; i < kNumParam; ++i) {
if (i < num_var) {
q[i] = -2.0 * FLAGS_weight_lateral_obstacle_distance *
(d_bounds[i].first + d_bounds[i].second);
} else {
q[i] = 0.0;
}
}
// Problem settings
OSQPSettings* settings =
reinterpret_cast(c_malloc(sizeof(OSQPSettings)));
// Define Solver settings as default
osqp_set_default_settings(settings);
settings->alpha = 1.0; // Change alpha parameter
settings->eps_abs = 1.0e-05;
settings->eps_rel = 1.0e-05;
settings->max_iter = 5000;
settings->polish = true;
settings->verbose = FLAGS_enable_osqp_debug;
// Populate data
OSQPData* data = reinterpret_cast(c_malloc(sizeof(OSQPData)));
data->n = kNumParam;
data->m = kNumConstraint;
data->P = csc_matrix(data->n, data->n, P_data.size(), P_data.data(),
P_indices.data(), P_indptr.data());
data->q = q;
data->A = csc_matrix(data->m, data->n, A_data.size(), A_data.data(),
A_indices.data(), A_indptr.data());
data->l = lower_bounds;
data->u = upper_bounds;
// Workspace
OSQPWorkspace* work = osqp_setup(data, settings);
// Solve Problem
osqp_solve(work);
// extract primal results
// prime求导符号
for (int i = 0; i < num_var; ++i) {
opt_d_.push_back(work->solution->x[i]);
opt_d_prime_.push_back(work->solution->x[i + num_var]);
opt_d_pprime_.push_back(work->solution->x[i + 2 * num_var]);
}
opt_d_prime_[num_var - 1] = 0.0;
opt_d_pprime_[num_var - 1] = 0.0;
// Cleanup
osqp_cleanup(work);
c_free(data->A);
c_free(data->P);
c_free(data);
c_free(settings);
return true;
} 三、调试过程记录
1.代码缺失与完善
调试过程中发现各种遗漏或者错误,改就是了...
2.实车执行失败案例与分析
记录下调试过程中失败的过程。
2.1 车辆遇到贴近的障碍物:一直想往上撞
计算耗时无法控制,一旦接近障碍物,由于备选轨迹很多,并且每个轨迹都要进行碰撞检测,外加工控机性能有限,导致耗时飙至900ms,已经严重不符100ms的运算周期了,直接导致轨迹拼接不准确,控制和规划无法很好衔接。
但是有一点没想通:即使轨迹拼接出问题,为何会往障碍物上撞,暂时把这个问题搁置了,后续解决。
2.2 使用二次规划,贴近障碍物时无解,轨迹飞掉
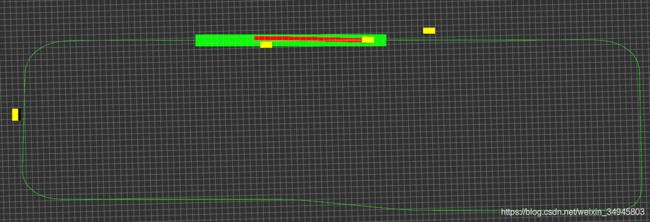
(a)权重不合理,导致轨迹规划无解
发现在和障碍物平齐时,自车横向偏移量总是比边界多了0.1m....然后求解失败
画个图,一切明了,就像那高尔夫球进洞,或者《信条》里的逆向子弹,如果轨迹有偏差,子弹是无法退回枪膛的,只会和枪管发生碰撞。

解决方法比较简单,调节权重,提高自车和障碍物距离的权重,使得生成的轨迹适当远离障碍物,从红色变为绿色线。
(b)过早的转弯,导致与障碍物发生碰撞

这里问题根源还没锁定,可能因素有两块:
- 控制在选取预瞄距离后,过早的进行了转向控制
- 规划的轨迹的确过早转向(这样的话就不满足求解约束了额,可能性不大)
不知有前辈怎么解决的。
2.3 在特定的几个点,轨迹直接飞掉,约束失效
车辆到某些位置会出现规划失败的情形,无法产生有效轨迹。为了查原因,关闭了轨迹有效性检测,然后发现轨迹是这个diao样子....飞掉了

查看该处的障碍物SL信息,发现SL完全乱掉了。回想Frenet坐标系在面对U型弯圆心处障碍物投影特点(障碍物会被极大拉伸),在出问题的点,该位置处参考线为圆弧形,障碍物恰好位于其圆心附近,导致障碍物在frennet投影时出现了右下图所示,存在多个投影点,其SL图当然是要废掉了。
总结
目前已经实现了单车道内障碍物的规避,包括绕行和减速以及停车。一套下来,虽然只是简单的功能复现,仅仅冰山一角但已经收益颇丰,实际操作的过程难度和踩坑大幅超过了自己的预期,多亏了身边大哥的指导和帮助,开发工作真的是需要多交流与沟通。
下一阶段目标:
实现多车道的轨迹规划,园区内可以采用伪车道,即单条referenceline进行扩幅,覆盖整条道路宽度即可,另一个是真实的多车道多referenceline,继续加油,一点点进步。