辅助驾驶功能开发-功能规范篇(04)- 交通拥堵辅助及集成式巡航辅助TJA/ICA
1. 交通拥堵辅助及集成式巡航辅助功能概述
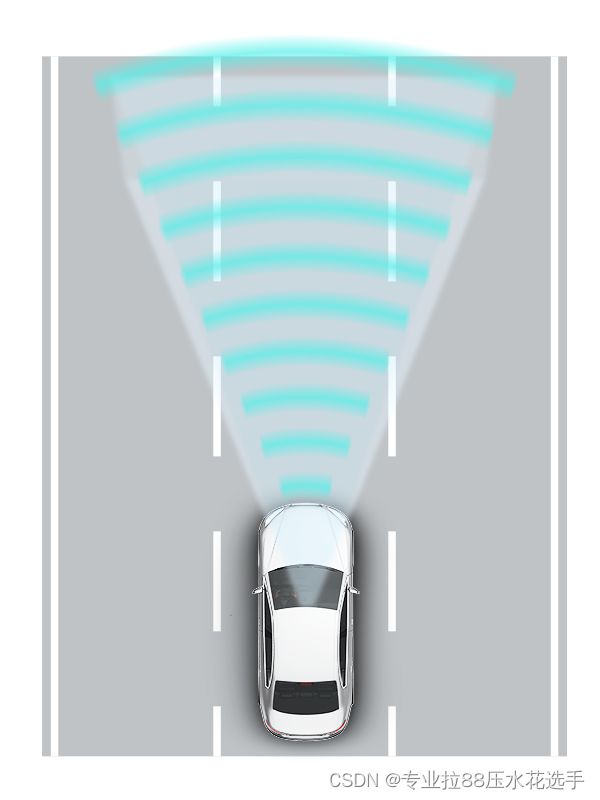
TJA/ICA在全速度范围内为驾驶员提供车辆的纵向和横向辅助。纵向辅助由ACC系统实现,将自身车辆维持在固定的车速或者与前方道路使用者的固定时间间隔行驶。侧向辅助基于不同的速度区间提供不同的辅助方案:
- 在TJA速度区间(一般为0 - 60 kph),如果车道线存在,车辆会被维持在车道之内行驶;否则车辆会跟随前方车辆的侧向移动行驶。
- 在ICA速度区间(一般为60 kph以上),车辆会被维持在车道中心附近行驶。
TJA/ICA在单调的驾驶环境或者交通拥堵的情况之下,可以减轻驾驶员的工作量,提供安全舒适的驾驶环境。此系统不提供自动驾驶功能,不允许长时间的脱手驾驶。在需驾驶员接管的环境下,例如转弯、路口、并道以及前方车辆切入等,驾驶员需全权负责车辆的驾驶。
2. 典型用例
TJA/ICA典型用例
| 使用案例图例 |
使用案例描述 |
|
|
道路标记可见 引导车辆可见
|
|
|
道路标记可见 引导车辆可见
|
|
|
道路标记可见 引导车辆不可见
|
|
|
道路标记不可见 引导车辆可见
|
|
|
道路标记不可见 引导车辆不可见
|
|
|
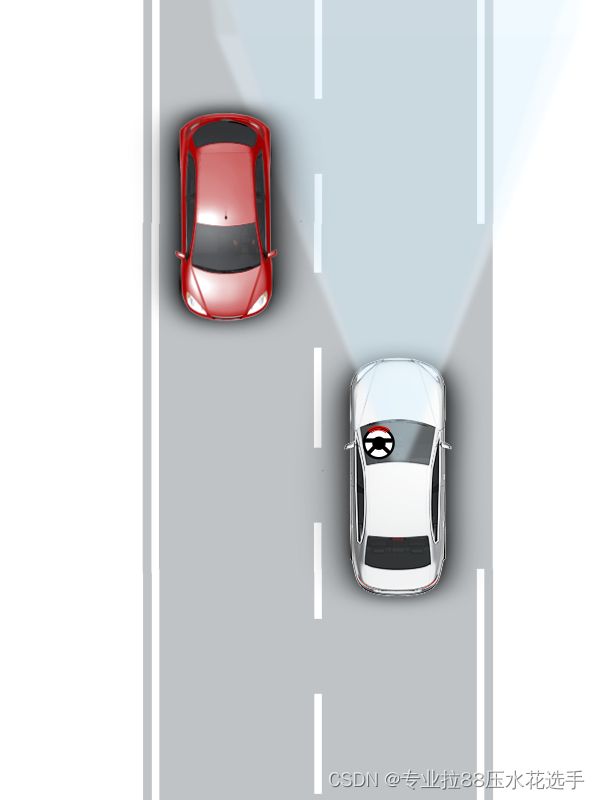
引导车辆切出
|
|
|
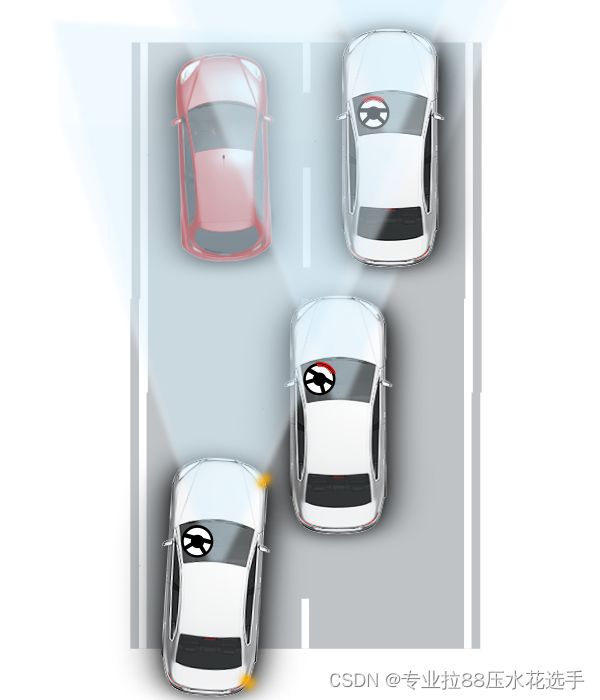
车辆切入
|
|
|
弯道行驶
|
|
|
车道返回
|
|
|
变道
|
|
|
单侧车道线短暂丢失
|
|
|
并道
|









3. 功能开启
TJA/ICA在下列条件全部满足的情况之下会被激活(可以根据客户需求进行配置):
驾驶员开启了TJA/ICA功能。
TJA/ICA未检测到故障,例如雷达或摄像头硬件故障。
TJA/ICA根据车辆配置码被开启。
4. 功能解除
TJA/ICA在下列任何一个条件满足的情况之下会被解除(可以根据客户需求进行配置):
驾驶员关闭了TJA/ICA功能。
- TJA/ICA检测到故障,例如雷达或摄像头系统故障。
- TJA/ICA根据车辆配置码被关闭。
5. 工作序列
5.1 系统架构
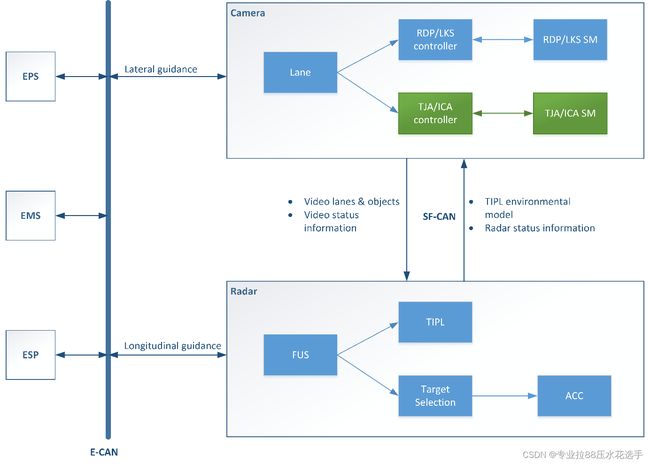
TJA/ICA雷达和摄像头的融合系统,其系统架构见下图:
5.2 传感器和功能
5.2.1摄像头
(1)功能:道路边界检测
摄像头提供基于图像的道路边界探测,可支持以下边界类型:
- 印制车道线(实线或虚线)
- 波特点
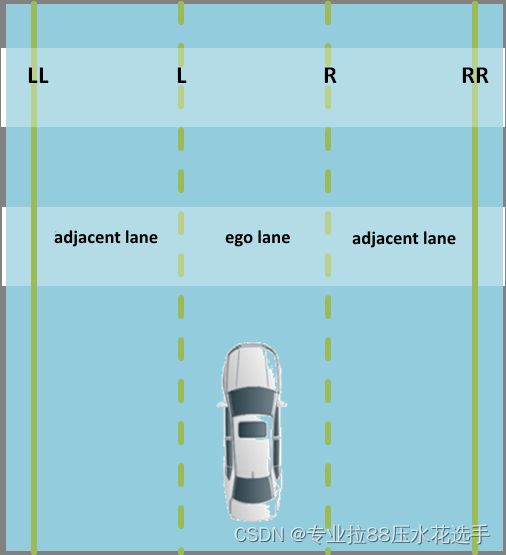
车道线由一个数学模型(螺旋模型)表征。总体而言,摄像头可以探测到四条道路边界线,可以表征自身车道,左侧车道和右侧车道。道路边界线信息可以通过SF-CAN传送给雷达。
(2)功能:物体检测
摄像头可以提供基于图像的车辆(乘用车、卡车、摩托车)和行人探测,每一个被探测到物体都可以被分配一个固定的ID并检测以下属性:
- 物体类型
- 3D位置
- 速度
- 碰撞时间
- …
总体而言,摄像头同时可以检测16个物体,包括8个车辆和8个行人。物体信息会通过SF-CAN传送给雷达。
(3)功能:侧向辅助
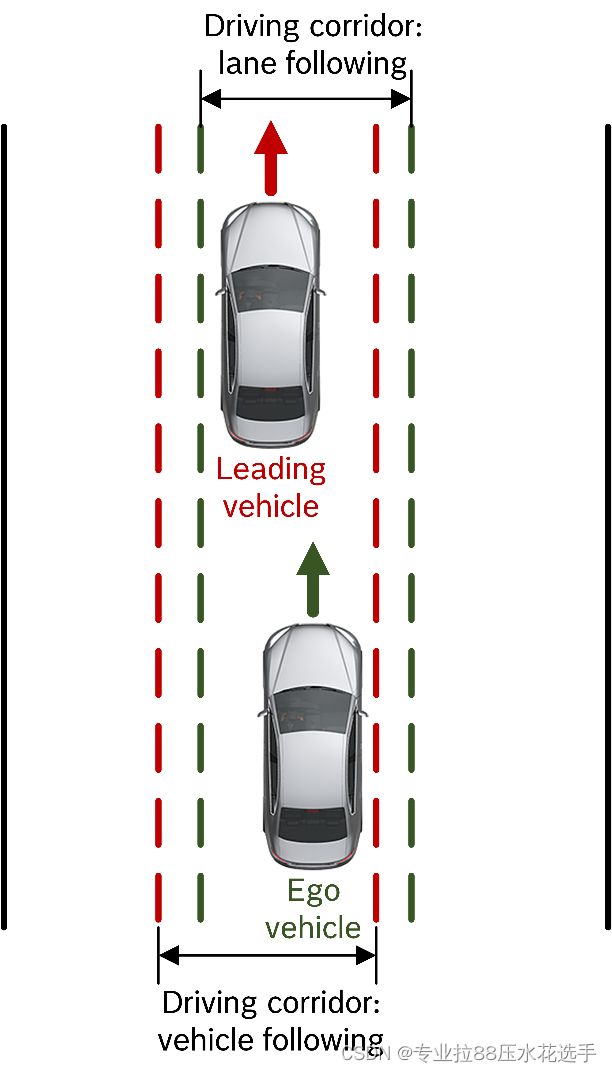
侧向辅助提供了TJA/ICA的侧向控制逻辑,此逻辑基于自车轨迹和目标的驾驶轨道的相对位置而计算一个目标转向扭矩或角度,进而将车辆控制在驾驶轨道的中间行驶。在ICA模式下,摄像头探测到的自身车道会作为目标的驾驶轨道使用,因此属于车道跟踪。在TJA模式下,由于车速较低(< 60 km/h),并且道路使用者数量较多,车道跟踪模式通常并不可用,因此会使用雷达基于TIPL模型而计算的目标驾驶轨迹。如果存在引导车辆,自身车辆会跟随引导车辆进行侧向移动,否则继续进行车道跟踪(如果车道线可见的话)。除了控制逻辑之外,系统还会监控功能的抑制条件,如果介入的时机并不成熟,系统不会发出目标的转向扭矩或角度。目前侧向辅助有摄像头实现。目标的转向扭矩或角度会通过车辆CAN总线(E-CAN)传送给EPS系统进行转向控制。侧向辅助的详细描述见侧向辅助状态机章节。
5.2.2 雷达
(1)功能:驾驶轨道计算
雷达基于TIPL模型提供驾驶轨道的拓扑描述,此描述基于以下输入得到:
- 静态道路边界信息,例如摄像头探测到的车道线
- 自身车辆的轨迹信息
- 其它道路使用者的轨迹信息,例如引导车辆
TIPL假设静态车道边界、自身车道轨迹和其它道路参与者的轨迹是平行的,此模型不适用于横向或者斜向交通。如果静态道路边界信息可用,驾驶轨道主要根据道路边界得到。
在此前提下,以下两种模式可以实现:
- 选项1 – 始终使用道路中心线作为目标轨迹
- 选项2 – 如果引导车辆行驶在车道以内,可以在道路中心线之上叠加一个偏移量以使用引导车辆的轨迹作为目标轨迹
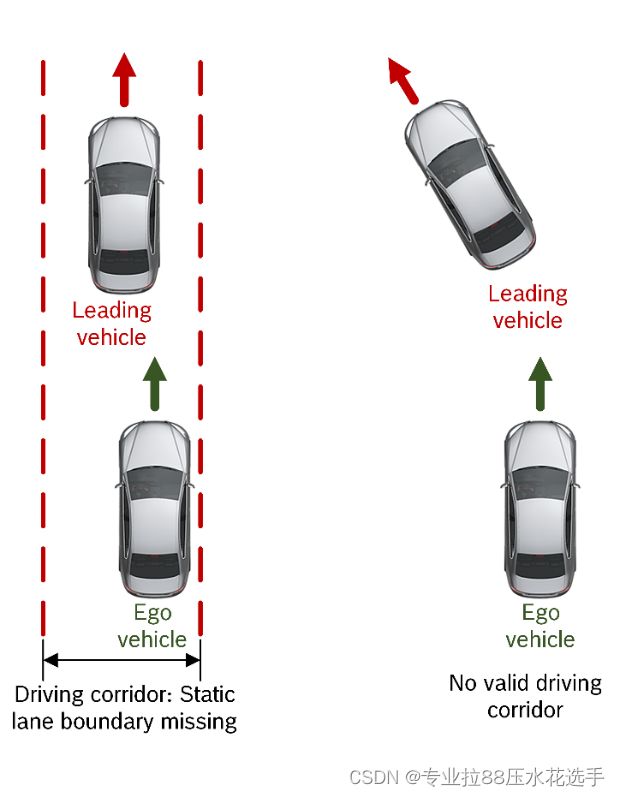
如果静态车道边界信息不可用,驾驶轨道主要由引导车辆的轨迹和一个预先定义的车道宽度(约为3m)得到。考虑到使用的是平行车道模型,如果自身车辆的轨迹和引导车辆的轨迹的一致性缺失,例如引导车辆正在切出当前车道或自身车辆在进行变道,驾驶轨道就会无效。
计算的驾驶轨道的数学模型(螺旋模型)和摄像头道路边界的模型一致。最多有4条驾驶轨迹的边界线通过SF-CAN输出给摄像头。
(2)功能:纵向辅助
纵向辅助主要通过停走型ACC实现,相关规范由另外的文档描述。
5.3 侧向辅助状态机
5.3.1自身车道选择
TJA和ICA作为一个综合的功能在全速段使用,因此二者的侧向辅助共用一个状态机。为保证此状态机对两种功能模式都有效,系统会基于自车车速选择自身的目标轨道。如果自车车速低于TJA的最大车速(一般为60 km/h),系统会选择雷达发送的TIPL车道。如果自车车速高于TJA的最大车速,系统会选择摄像头检测到的车道。一般而言,由于TIPL车道和摄像头车道存在一些差异(例如不同的螺旋参数),为保证功能的性能,由一种车道向另一种车道的更新是一个循序渐进的过程。通常而言,此更新可以在20到30步以内实现。
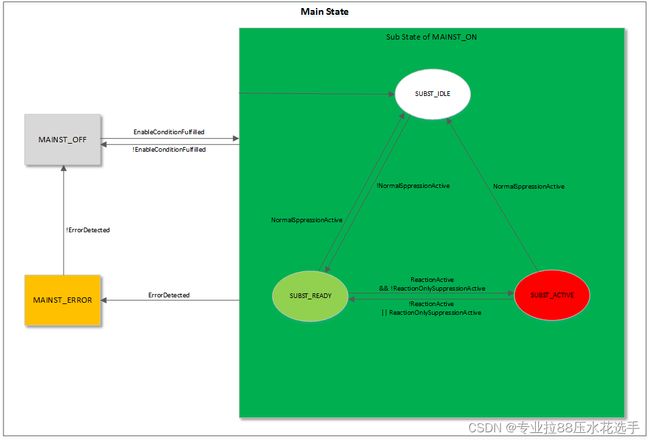
5.3.2 状态迁移图
5.3.3状态和事件
(1)状态
TJA/ICA包括两种状态:
- 主状态
- 子状态
主状态有三种可能性:
- MAINST_OFF
- MAINST_ON
- MAINST_ERROR
子状态有三种可能性:
- SUBST_IDLE
- SUBST_READY
- SUBST_ACTIVE
TJA/ICA的输出信号映射逻辑见下表。
| 输出信号值 |
主状态 |
子状态 |
Comments 说明 |
| LKS_Status |
|||
| LKS off |
MAINST_OFF |
||
| LKS standby |
MAINST_ON |
SUBST_IDLE |
|
| LKS active |
MAINST_ON |
SUBST_READY SUBST_ACTIVE |
|
| LKS failure |
MAINST_ERROR |
||
| Camera blocked |
MAINST_ERROR |
||
| LKS_LeftTrackingStatus |
|||
| No display |
SUBST_IDLE |
||
| Tracking |
SUBST_READY |
||
| Intervention |
SUBST_ACTIVE |
||
| LKS_RightTrackingStatus |
|||
| No display |
SUBST_IDLE |
||
| Tracking |
SUBST_READY |
||
| Intervention |
SUBST_ACTIVE |
||
| LKS_TorqueRequest |
|||
| = 0 Nm |
SUBST_IDLE SUBST_READY |
||
| != 0 Nm |
SUBST_ACTIVE |
||
(2)事件
按状态迁移图所示,事件可以触发状态的改变,相关的事件描述见下表。
| Conditions |
Comments |
| EnableConditionFulfilled (下述条件均需满足) |
|
| 摄像头初始化已正确完成 |
|
| 驾驶员已将功能开启,或者功能在之前的点火周期已开启 |
|
| 功能已被配置 |
|
| ErrorDetected (下述条件中至少一项需满足) |
|
| 永久性系统硬件故障被检测到 |
|
| 临时性系统硬件故障被检测到 |
|
| 摄像头永久性失明被检测到 |
|
| 摄像头处在过热保护模式 |
|
| 摄像头处在高压保护模式 |
|
| 运行时间故障导致系统热重启 |
|
| 相关的通信故障被检测到,例如报文超时,报文计数器故障,冗余检查故障和数据长度故障 |
|
| 相关的信号故障被检测到,例如输入的车速信号无效 |
|
| NormalSuppressionActive (下述条件中至少一项需满足) 注:各抑制源可以独立配置。 |
|
| 速度过高: VDisplay < 172 kph解除抑制 VDisplay > 180 kph触发抑制 条件满足后立即开启抑制 条件满足时立即解除抑制 |
|
| 横摆角速率过高: YawRate < 0.20 rad/s解除抑制 YawRate > 0.25 rad/s触发抑制 条件满足后需等待5秒钟以开启抑制 条件满足后需等待1秒钟以解除抑制 |
|
| 车道过宽: LaneWidth < 5.2 m解除抑制 LaneWidth > 5.5 m触发抑制 条件满足后需等待3秒钟以开启抑制 条件满足后需等待1秒钟以解除抑制 |
|
| 车道过窄 LaneWidth > 2.6 m解除抑制 LaneWidth < 2.5 m触发抑制 条件满足后需等待3秒钟以开启抑制 条件满足后需等待1秒钟以解除抑制 |
|
| 车道曲率过高: LaneCurvature < 0.0033 m-1解除抑制 LaneCurvature > 0.004 m-1触发抑制 条件满足后需等待2秒钟以开启抑制 条件满足后需等待4秒钟以解除抑制 |
|
| 车道线丢失: 两侧车道线均被探测到时解除抑制 至少有一侧车道线未被探测到时触发抑制 条件满足后需等待3秒钟以开启抑制 条件满足后需等待3秒钟以解除抑制 |
|
| 变道: 未检测到变道时解除抑制 检测到变道时触发抑制 条件满足后需等待0.5秒以开启抑制 条件满足后需等待3秒钟以解除抑制 |
变道事件表示车辆的自身车道发生了改变,例如车辆中心线偏出了当前车道边线。 |
| ABS和ESP作用: ABS和ESP未激活时解除抑制 ABS或ESP激活时触发抑制 条件满足后立即开启抑制 即使抑制已经开启,系统还是会持续作用3秒钟以维持驾驶员接管警告 条件满足后需等待1秒钟以解除抑制 |
|
| 驾驶员介入 TorsionBarTorque < 1.5 Nm 或手力矩方向与TJA/ICA请求力矩方向相同解除抑制 驾驶员手力矩 > 1.5 Nm且手力矩方向与TJA/ICA请求力矩方向不同激活抑制 条件满足后等待3秒钟以激活抑制 条件满足后等待0.5秒钟以解除抑制 |
可选 |
| 脱手: TorsionBarTorque > 0.4 Nm解除抑制 TorsionBarTorque < 0.3 Nm激活抑制 条件满足后等待20秒钟以激活抑制 条件满足后等待3秒钟以解除抑制 |
|
| 纵向控制不可用: 如果ACC状态为“激活”或“暂停”,解除抑制。 如果ACC状态为“关闭”、“禁用”、“ 待机”、“永久性故障”或“临时性故障”,激活抑制。 条件满足后等待1秒钟以激活抑制 条件满足后等待0.5秒钟以解除抑制 |
|
| 自动泊车系统激活: 如果自动泊车系统不在工作,解除抑制。 如果自动泊车系统在工作,激活抑制。 |
|
| 注:各抑制源可以独立配置。 |
|
| 转向灯: 转向灯关闭时解除抑制 转向灯开启时触发抑制 条件满足后立即触发抑制 条件满足后需等待5秒钟以解除抑制 |
|
| 制动: < 3 bar解除抑制 > 10 bar触发抑制 条件满足后立即触发抑制 条件满足后需等待4秒钟以解除抑制 |
|
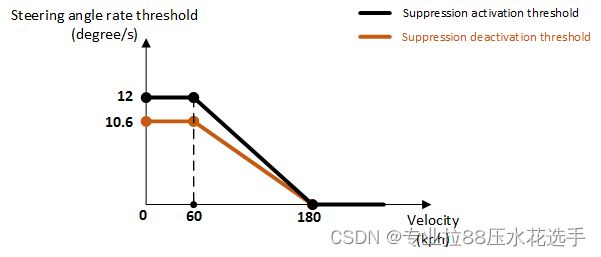
| 转角速率: 方向盘转角速率小于解除阈值时解除抑制 方向盘转角速率大于激活阈值时触发抑制 条件满足后立即触发抑制 条件满足后需等待4秒钟以解除抑制 阈值设置见下图。
|
只针对低灵敏度的TJA/ICA |
| 油门踏板速率过高: AccPedatRate < 30 %/s解除抑制 AccPedalRate > 70%/s触发抑制 条件满足后立即触发抑制 条件满足后需等待4秒钟以解除抑制 |
只针对低灵敏度的TJA/ICA |
| EPS就绪: EPS就绪时解除抑制 EPS未就绪时触发抑制 EPS就绪表示EPS处于状态“EPS_LKSConrolReady”或“EPS_LKSControlActive” 条件满足后立即开启抑制 条件满足时立即解除抑制 |
|
| 危险警报灯: 危险警报灯关闭时解除抑制 危险警报灯开启时触发抑制 条件满足后立即开启抑制 条件满足后需等待5秒钟以解除抑制 |
可选项 |
| ReactionActive (下述条件需满足) |
|
| 作用条件满足: 始终激活 针对低灵敏度设置,弯道的车道边界会被虚拟向内侧弯方向移动,最大横移量可达20 cm 针对低灵敏度设置,窄道的车道宽度会被虚拟扩展,最大横移量可达20 cm |
|
6.性能
| 关键性能指标 |
性能 |
| 可用性 |
TBD |
| 误触发率 |
TBD |
7.局限性
TJA/ICA功能会受限于摄像头故障,摄像头遮挡以及在章节“状态机/工作序列”中列举的各种抑制事件。如果摄像头未正确校准,性能会降低。TJA/ICA性能受天气、照明度和车道线清晰度的影响。在背光,日落,路面被冰雪覆盖以及路面磨损严重的情况下,性能会有显著的下降。此系统不提供自动驾驶功能,不允许长时间的脱手驾驶。在需驾驶员接管的环境下,例如转弯、路口、并道以及前方车辆切入等,驾驶员需全权负责车辆的驾驶。
| 由于TJA/ICA属于L2等级,需要驾驶员持续将手放在方向盘上,并准备随时接管系统。 以下场景可能限制TJA/ICA的横向控制性能。 |
|
| 十字路口跟车行驶场景:
系统表现:
风险:
|
|
| 十字路口跟车变道场景:
系统表现:
风险:
|
|
| 匝道入口场景:
系统表现:
风险:
|
|
| 车道分离场景:
系统表现:
Risk风险:
|
|
| 道路印记场景:
系统表现:
风险:
|
|
| 车道变多场景:
系统表现:
风险:
|
|
| 道路边缘场景:
系统表现:
风险:
|
|
| 路面较差场景:
系统表现:
风险:
|
|
| 环境变化场景: 自车在不利的条件下行驶,如雪,雨,阳光直射,夜晚等 系统表现:
风险:
|
|
| 建筑区域场景:
系统表现:
风险:
|
|
| 复杂场景:
系统表现:
风险:
|
|
TJA/ICA功能需要驾驶员持续监控与接管系统,该功能只是对一般场景提供舒适性驾驶,驾驶员应该对安全驾驶负责。
8. 验证
TJA/ICA的性能通过实车耐久性测试和场地测试进行评估。功能的可用性可以自动计算,例如通过输出的CAN信号。误触发率基于测试人员的主观评估而获得。功能性能由客户进行最终确认。
9. 接口
摄像头通过车辆CAN总线与车辆进行通信。对于功能的输入和输出信号,参考客户定义的CAN矩阵。
10. 功能安全
按照ISO26262的要求,在摄像头层面TJA/ICA功能被评定为QM。