kalibr使用笔记
官网
GitHub - ethz-asl/kalibr: The Kalibr visual-inertial calibration toolboxThe Kalibr visual-inertial calibration toolbox. Contribute to ethz-asl/kalibr development by creating an account on GitHub. https://github.com/ethz-asl/kalibr
https://github.com/ethz-asl/kalibr
编译
编译kalibr的Bug:
fatal error: libv4l2.h: 没有那个文件或目录
sudo apt install libv4l-dev (专门用来处理视频图像)标定过程
Kalibr标定完整过程(相机用的小觅深度系列相机)_超超512的博客-CSDN博客_kalibr标定 https://blog.csdn.net/u010056641/article/details/105665309
https://blog.csdn.net/u010056641/article/details/105665309
生成标定板
支持checkerboard和apriltag:
参考https://github.com/ethz-asl/kalibr/wiki/calibration-targets
使用Aprilgrid的好处:
partially visible calibration boards can be used ;pose of the target is fully resolved (no flips)
运行kalibr_create_target_pdf –h
报错:ImportError: No module named pyx
生成棋盘格会有报错,因为作者写的提示代码少了-,最后应为
kalibr_create_target_pdf --type checkerboard --nx 6 --ny 6 --csx 0.05 --csy 0.1根据打印后的棋盘格,编辑标定板信息,文件名april_6x6.yaml
#example for aprilgrid
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
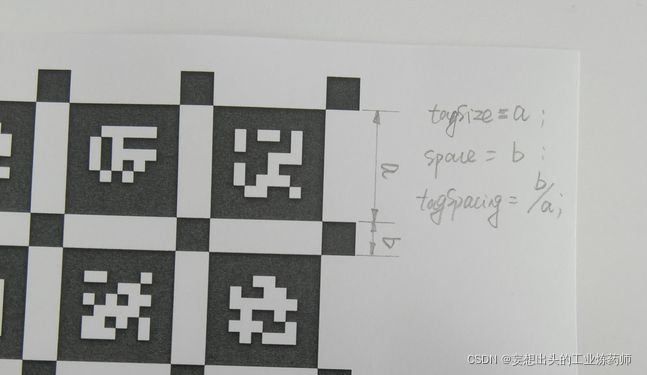
tagSize: 0.088 #size of apriltag, edge to edge [m]
tagSpacing: 0.3 #ratio of space between tags to tagSize
#example: tagSize=2m, spacing=0.5m --> tagSpacing=0.25[-]
#example for checkerboard
target_type: 'checkerboard' #gridtype
targetRows: 14 #number of internal chessboard corners
targetCols: 11 #number of internal chessboard corners
rowSpacingMeters: 0.04 #size of one chessboard square [m]
colSpacingMeters: 0.04 #size of one chessboard square [m]
打印标定板
打印注意要按照实际的大小打印,而且打印的标定版至少要占图像的3/4;
标定相机
kalibr_calibrate_cameras的详细参数见kalibr-master/aslam_offline_calibration/kalibr/python/kalibr_calibrate_cameras
常用kalibr_calibrate_cameras 参数说明:
--bag /home/heyijia/stereo_calibra.bag
--topics /left /right
--models pinhole-radtan pinhole-radtan : pinhole-equi,omni-radtan
--target /home/heyijia/april_6x6_80x80cm_A0.yaml
--show-extraction
采用 pinhole-equi 模型,对畸变大的相机效果不错
VINS采用MEI模型,即omni-radtan
运行以上指令出现BUG:ImportError: No module named igraph
sudo apt install python-igraph标定过程中出现BUG:
initialization of focal length for cam with topic /img_left failed
kalibr 标定记录_AndyCheng_hgcc的博客-CSDN博客_kalibr标定
解决:
如果提示不能得到初始焦距的时候,可以设置:export KALIBR_MANUAL_FOCAL_LENGTH_INIT=1。然后运行程序,当程序运行失败的时候,它会提示要你手动输入一个焦距,Initialization of focal length failed. Provide manual initialization: 这时你手动输入比如 400,给比较大的值,也能收敛。
Input focal length guess if initial guess fails. (#346) · ethz-asl/kalibr@d8bdfc5 · GitHub
运行:
export KALIBR_MANUAL_FOCAL_LENGTH_INIT=1
rosrun kalibr kalibr_calibrate_cameras --bag /home/hik/share/stereo_calibra04201450_4.bag --topics /img_left /img_right --models pinhole-radtan pinhole-radtan --target /home/hik/share/april_6x6_80x80cm.yaml --show-extraction
解决2:
换一种相机模型MEI,即可自动计算出focal_length
rosrun kalibr kalibr_calibrate_cameras --bag /home/hik/share/stereo_calibra_0423_1.bag --topics /img_left /img_right --models omni-radtan omni-radtan --target /home/hik/share/april_6x6_80x80cm.yaml --show-extraction
kalibr 标定记录_AndyCheng_hgcc的博客-CSDN博客_kalibr标定
标定imu
安装
https://blog.csdn.net/weixin_41586393/article/details/99306237
用imu_utils标定IMU,之后用于kalibr中相机和IMU的联合标定_一ping就通的博客-CSDN博客_code_utils
GitHub - gaowenliang/imu_utils: A ROS package tool to analyze the IMU performance.
sudo apt-get install libdw-dev下载imu_utils和code_utils后,先编译code_utils(因为imu_utils依赖code_utils,填坑: 在code_utils下面找到sumpixel_test.cpp,修改#include "backward.hpp"为 #include “code_utils/backward.hpp”,再编译。),然后编译imu_util
录数据
让IMU静止不动两个小时,录制IMU的bag
准备标定
#imu topic的名字
#标定的时长
标定
roscore
rosbag play -r 200 imu.bag
roslaunch imu_utils mynt_imu.launch注意:
输出的imu.yaml中加速度和陀螺仪的格式必须写成1.0e-04这样的格式,否则报错:
can't multiply sequence by non-int of type 'str'
联合标定
kalibr_calibrate_imu_camera详细参数参见:
kalibr-master/aslam_offline_calibration/kalibr/python/kalibr_calibrate_imu_camera
kalibr_calibrate_imu_camera参数说明:
--target /home/heyijia/april_6x6_80x80cm_A0.yaml
--cam /home/heyijia/camchain-homeheyijiastereo_calibra.yaml
--imu /home/heyijia/imu_mynteye.yaml
--bag /home/heyijia/stereo_imu_calibra.bag
--bag-from-to 2 37
运行指令:
rosrun kalibr kalibr_calibrate_imu_camera --bag /home/hik/share/stereo_imu_calibra0420.bag --cam /home/hik/share/camchain-homehiksharestereo_calibra04201450_4.yaml --imu /home/hik/share/imu.yaml --target /home/hik/share/april_6x6_80x80cm.yaml --show-extraction --perform-synchronizationBug:
OverflowError: bad numeric conversion: positive overflow
OverflowError: bad numeric conversion: positive overflow · Issue #401 · ethz-asl/kalibr · GitHub
有踩过坑的通过--perform-synchronization解决overflow的问题
rosrun kalibr kalibr_calibrate_imu_camera --bag /home/hik/share/stereo_imu_calibra0420.bag –perform-synchronization --cam /home/hik/share/camchain-homehiksharestereo_calibra04201450_4.yaml --imu /home/hik/share/imu.yaml --target /home/hik/share/april_6x6_80x80cm.yaml –show-extraction --no-time-calibration运行以下数据集可以完成时间同步校验:
rosrun kalibr kalibr_calibrate_imu_camera --bag /home/hik/share/stereo_imu_calibra0421_3.bag --perform-synchronization --cam /home/hik/share/camchain-homehiksharestereo_calibra04201450_4.yaml --imu /home/hik/share/imu.yaml --target /home/hik/share/april_6x6_80x80cm.yaml --max-iter 100 --show-extraction
Camera imu时间同步问题(尚未解决)
Multi IMU and IMU intrinsic calibration · ethz-asl/kalibr Wiki · GitHub
Optimization failed! · Issue #55 · ethz-asl/kalibr · GitHub
Optimization failed in kalibr_calibration_imu_camera · Issue #41 · ethz-asl/kalibr · GitHub
Wrong transformation between IMU and camera · Issue #228 · ethz-asl/kalibr · GitHub
硬件同步方案
ROS camera and IMU synchronization | Work-is-Playing
附录
slam里常用的相机模型
SLAM 中常用的相机模型&畸变模型总结_啊啦啦工业的博客-CSDN博客_多项式畸变模型
MEI Camera:Omni + Radtan6
Pinhole Camera:Pinhole + Radtan
根据经验,小于90度使用Pinhole,大于90度使用MEI模型。
SLAM 中常用的相机模型&畸变模型总结_啊啦啦工业的博客-CSDN博客_多项式畸变模型
https://github.com/ethz-asl/kalibr/issues/226
Kannala-Brandt model (pinhole-equi in Kalibr): https://github.com/ethz-asl/kalibr/pull/210
Imu和camera标定
1. Online calibration: VINS-Mono(Online Temporal Calibration for Monocular Visual-Inertial Systems, IROS 2018,Best student paper)
2. Online calibration: MSCKF(Online Temporal Calibration for Camera-IMU Systems:Theory and Algorithms,2014)
3. Offline calibration: Kalibr(Unified Temporal and Spatial Calibration for Multi-Sensor Systems,IROS 2013)
整理不易,点个赞呀,喂~