AUBO E系列教育科研型机器人Q&A--持续更新中

目录
一. 机器人安装部署
(1)AUBO E系列仿真软件部署
(2)AUBO E系列仿真软件如何安装
二.机器人示教编程
(1)如何创建带有过程的工程
(2)如何创建带有脚本的工程
(3)如何加载及运行工程
(4)如何新建工程
(5)如何新建过程
三. 机器人脚本编程
(1)遨博协作机器人支持哪种脚本语言
(2)遨博协作机器人Script命令中脚本文件的导入、导出路径在哪里
(3)遨博协作机器人Script命令中AUBOScript脚本指令接口可以在哪里获取
(4)遨博协作机器人Python语言脚本怎样使用
(5)遨博协作机器人Script脚本文件编程保存时出现“脚本错误”报警
四. 机器人SDK开发
(1)C++版本的SDK开发环境在哪里下载,如何使用
(2) VS2017或更新版本使用SDK示例编译错误
(3)如何获取最新版本的SDK
(4)网络正常,使用SDK时为什么无法控制机械臂
(5)怎么使用SDK说明文档外的更多接口
五. 机器人ROS开发
(1)ROS控制真实机器人,示教器一直OverSpeed报警
(2)ROS控制真实机器人运行轨迹时抖动较大
(3)ROS运行时,提示aubo_driver缺少库
(4)通过moveit接口控制机械臂速度与加速度无效
(5)虚拟机使用Gazebo仿真,出现闪退或空白
七. 2D机器视觉编程
(1)“加密狗未检测到或检测异常”
(2)间距检测无结果
(3)实时取流有图像,执行程序时图像源报错
(4)使用图片进行练习时,模板匹配成功,标定点乱序
(5)使用图片进行练习时,图片不自动切换
(6) 无法自动获取相机IP地址
八. 3D机器视觉编程
(1)center软件部署消失
(2)相机非主控时如何把参数传给机器人
(3)相机内参检测失败
(4)硬件连接正常IP配置正常viz软件已勾选自动加载当前工程连接不上机器人
(5)硬件连接正常IP配置正常无法连接机器人
一. 机器人安装部署
(1)AUBO E系列仿真软件部署
问题描述:AUBO E系列仿真软件部署?
1、下载仿真软件
AMD处理器:(用户名:aubo 密码:root)
网盘链接: https://b.cloud.189.cn/s/JFvm6j2QbQRn提取码:TGM1
英特尔处理器:(用户名:root 密码:user)
链接:https://pan.baidu.com/s/1q7OHrW9lW0J9RB7gGJHsoA
提取码:uccz
2、全部解压并找到并记住解压路径
3、双机桌面上的“VMware Workstation Pro”图标,打开虚拟机软件。点击“打开虚拟机”。

4、在刚才解压路径中找到并打开 “aubo.vmx”文件
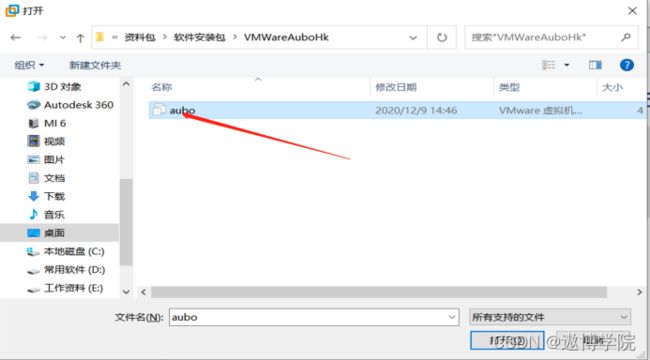
5、选择“aubo”虚拟机,并点击“开启此虚拟机”。

6、进入后双击“AUBOPE”等待软件打开

7、进入初始化界面,按照下图操作

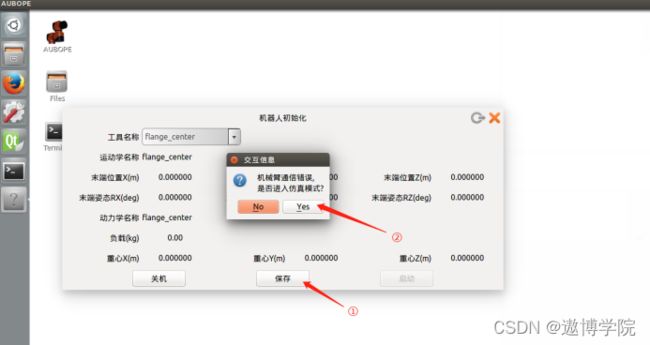


至此成功启动仿真软件
8、如果启动后没有机器人模型需要调高虚拟机配置


(2)AUBO E系列仿真软件如何安装
问题描述:AUBO E系列仿真软件如何安装?
解决办法:
1、仿真软件版本
推荐版本:VMware-workstation-16(要求win10 64位系统)
百度网盘链接:https://pan.baidu.com/s/1FWxu_0G7mVHBMZ5FvELz9g
提取码:ifid
2、VMware16安装
进入安装向导界面,点击“下一步”

勾选“我接受许可协议中的条款”,点击“下一步”。

更改安装目录,系统默认为C盘,点击“下一步”。

直接点击“安装”即可。
二.机器人示教编程
(1)如何创建带有过程的工程
问题描述:如何创建带有过程的工程?
解决办法:
1.点击示教器【在线编程】,点击【工程】,点击【新建】

2.点击【条件】,点击高级条件

3.点击【Procedure】,插入过程

4.点击【Procedure Undefined】

5.选中一个过程程序,点击【确定】

6.点击【工程】后点击【保存】,为工程命名后保存,完成过程创建

(2)如何创建带有脚本的工程
问题描述:如何创建带有脚本的工程?
解决办法:
1.点击示教器【在线编程】,点击【工程】,点击【新建】

2.点击【条件】,点击高级条件

3.点击【Script】,插入脚本

4.点击【Script Undefined】,选择行脚本或脚本文件,选中脚本点击【确定】

5.点击【工程】后点击【保存】,为工程命名后保存,完成过程创建
(3)如何加载及运行工程
问题描述:如何加载及运行工程?
解决办法:
1.点击示教器【在线编程】,点击【工程】,点击【加载】

2.在工程目录中选择一个工程,点击【加载】
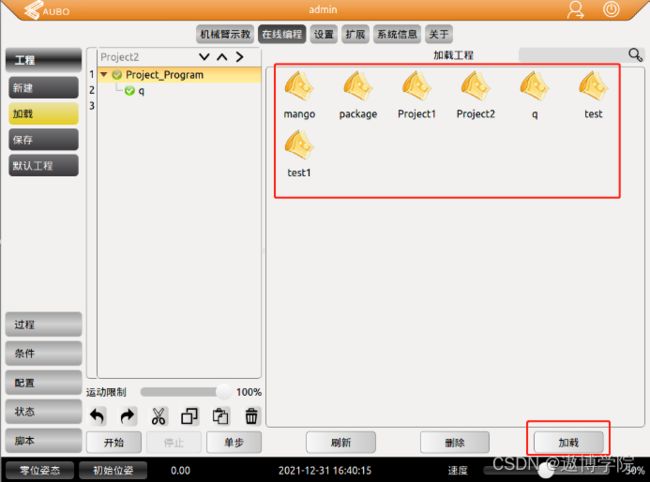
3.在【运动限制】中设置合适的运行速度,点击【开始】,如果机械臂姿态与开始点的姿态不一致,需要先长按自动移动,让机械臂回到开始点姿态,然后再点击【开始】

(4)如何新建工程
问题描述:如何新建工程?
解决办法:
1.点击示教器【在线编程】,点击【工程】,点击【新建】

2.点击【条件】,包含基本条件、高级条件和外设条件

3.点击Move,插入Move,点击【Move Undefined】设置运动方式和运动速度,设置完毕点击【确定】

4.点击【Waypoint Undefined】,点击【设置路点】示教一个点位,点击【确定】

5.依照此方法再添加个Move
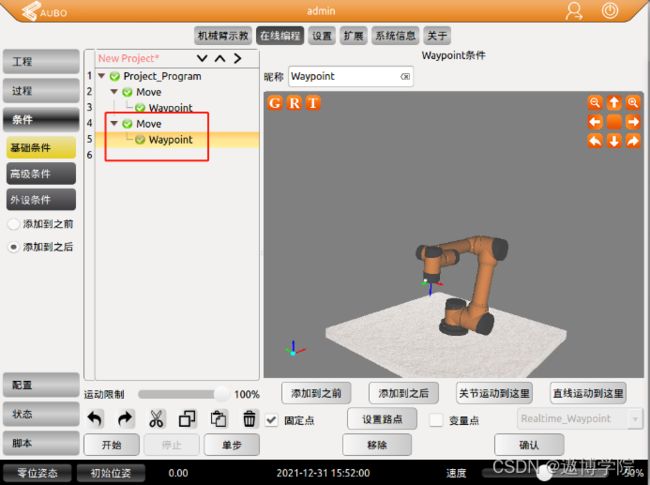
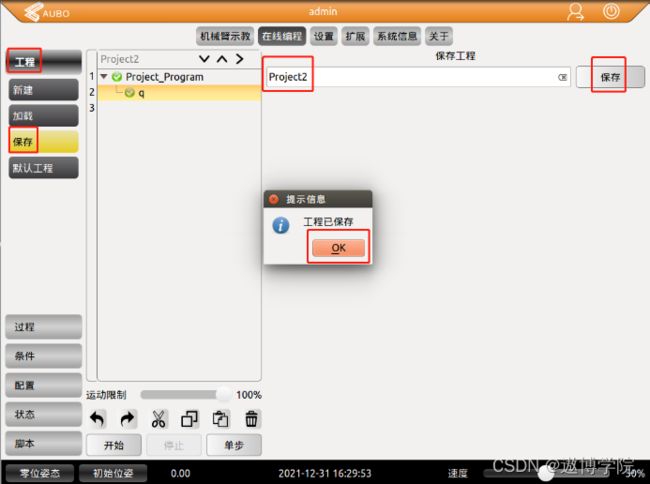
6.点击【工程】后点击【保存】,为工程命名后保存,完成工程创建

(5)如何新建过程
问题描述:如何新建过程?
解决办法:
1.点击示教器【在线编程】,点击【过程】,点击【新建】

2.点击【条件】,包含基本条件、高级条件和外设条件

3.点击Move,插入Move,点击【Move Undefined】设置运动方式和运动速度,设置完毕点击【确定】

4.点击【Waypoint Undefined】,点击【设置路点】示教一个点位,点击【确定】

5.依照此方法再添加个Move
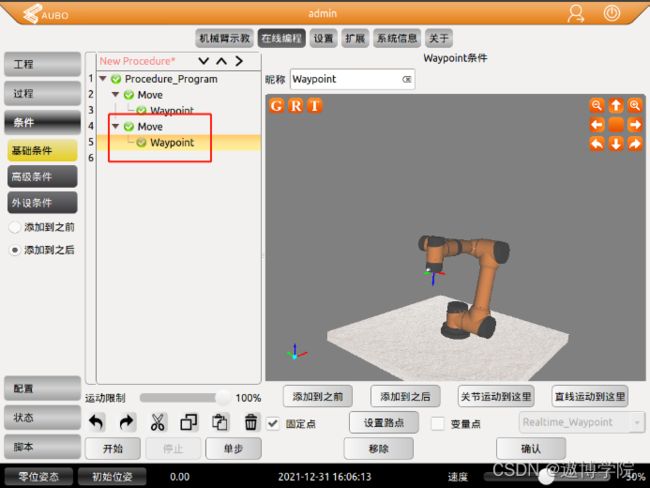
6.点击【过程】后点击【保存】,为过程命名后保存,完成过程创建

三. 机器人脚本编程
(1)遨博协作机器人支持哪种脚本语言
问题描述:遨博协作机器人支持哪种脚本语言?
解决办法:目前遨博机器人提供两种常用脚本语言的扩展库,一种是Lua语言,另外一种是python语言,扩展库涵盖了机器人的所有控制,可以充分利用脚本语言(例如:Python、Lua)的特性,使得软件具备更高的扩展性和移植性,并且能够充分的利用脚本语言丰富的库资源,使得机器人软件扩展更加灵活,功能更加丰富。
(2)遨博协作机器人Script命令中脚本文件的导入、导出路径在哪里
问题描述:遨博协作机器人Script命令中脚本文件的导入、导出路径在哪里?
解决办法:AUBOScript脚本文件存储路径为:
home/AuboRobotWorkSpace/teachpendant/share/teachpendant/script
(3)遨博协作机器人Script命令中AUBOScript脚本指令接口可以在哪里获取
问题描述:遨博协作机器人Script命令中AUBOScript脚本指令接口可以在哪里获取?
解决办法:遨博官网:服务与支持--资料下载--脚本服务与支持--资料下载--脚本服务与支持--资料下载--脚本手册
(4)遨博协作机器人Python语言脚本怎样使用
问题描述:遨博协作机器人Python语言脚本怎样使用?
解决办法:Python语言脚本需安装相应的Python脚本插件,并通过Script命令行脚本命令调用,具体插件及使用方法可与售后技术支持联系获取
(5)遨博协作机器人Script脚本文件编程保存时出现“脚本错误”报警
问题描述:遨博协作机器人Script脚本文件编程保存时出现“脚本错误”报警?
解决办法:请检查脚本内容中是否存在语法错误:如多余空格、指令拼写错误、中文符号、循环指令闭合错误等
四. 机器人SDK开发
(1)C++版本的SDK开发环境在哪里下载,如何使用
问题描述:需要使用Linux版本C++的SDK,不想自行搭建环境,开发环境在哪里下载,如何打开,开发包中提供的9个example分别的功能是什么?
解决办法:
1、打开遨博官网,在服务支持中选择资料下载,找到AUBO PE虚拟机进行下载即可,使用虚拟机软件打开,在虚拟机中提供了开发所需的环境和用于仿真的AUBO PE软件。

2、在虚拟机中找到QT开发软件,将C++示例程序拷贝到虚拟中,解压后使用QT打开AuboInterfaceExample.pro项目文件即可。
3、在示例程序中提供了9个常用功能的测试用例,具体功能如下图所示。

(2) VS2017或更新版本使用SDK示例编译错误
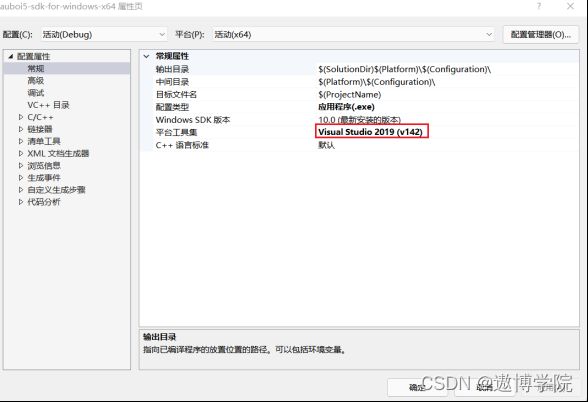
问题描述:使用了VS2017或更新的版本来编译SDK提供的示例程序,出现大量报错,无法编译成功,如下图所示?

解决办法:将工程属性中常规里的平台工具集修改为VS相同的版本即可,例如使用的是VS2019,按照下图示例进行修改。
(3)如何获取最新版本的SDK
问题描述:如何获取最新版本的SDK?
解决办法:打开遨博官网,在服务支持中选择资料下载,找到SDK应用开发包进行下载即可。
(4)网络正常,使用SDK时为什么无法控制机械臂
问题描述:网络正常,使用SDK为什么无法控制机械臂?
解决办法:检查主机和控制柜是否网络畅通,如网络正常,使用SDK时,必须首先调用登录接口,这是使用其他接口查询和设置机械臂的前提,默认的登录端口为8899,用户名为AUBO、密码为123456。
(5)怎么使用SDK说明文档外的更多接口
问题描述:在SDK说明文档中找不到需要的接口,如何得到更多的接口和使用方法?
解决办法:由于在SDK文档中只描述了常用和完成一般任务所需的接口,如果需要查看更多的SDK接口,可以找到提供的SDK库的对应头文件,里面包含全部的开发接口和介绍,例如下图。

五. 机器人ROS开发
(1)ROS控制真实机器人,示教器一直OverSpeed报警
问题描述:使用ROS控制真实机器人时,无论运行何种路径,机械臂会抖动一下后停止,并在示教器界面出现Singularity Overspeed的超速报警?
解决办法:这是由于部分机械臂的出厂软件版本不支持ROS,如Teachpendant Version:4.5.40,可在示教器的AUBOPE软件中的关于界面查看机械臂版本,遇到此问题请向技术支持索取支持ROS的软件版本,然后进行升级或降级操作。
(2)ROS控制真实机器人运行轨迹时抖动较大
问题描述:在使用ROS控制真实机器人时,机械臂轨迹正常运行,但是抖动较大?
解决办法:
1、如出现较大抖动,一般是由于机械臂控制柜和ROS主机之间的网络不稳定导致的,要求使用网线直连控制柜和主机,中间不可经过路由器、交换机等设备,另外如果是虚拟机环境,需要通过ping命令检查延迟,一般要求ping值较为稳定,并且小于1ms为佳;
2、如检查后网络正常,出现较为轻微的运动卡顿,这是正常现象,和示教器的示教运动相比,ROS采用开源的运动学算法,并没有针对机械臂进行优化和适配,所以并没有示教运动平滑,但是不影响使用。
(3)ROS运行时,提示aubo_driver缺少库
问题描述:在使用ROS连接真实机械臂时,运行指令后提示aubo_driver缺少相关的库文件?
解决办法:
1、这是由于没有在系统环境中声明aubo_driver中缺少的库文件,首先确保自己的工作空间已经source到系统变量中,通过roscd命令进入aubo_driver对应lib文件夹目录:
roscd aubo_driver/lib/lib64/2、通过pwd命令打印当前文件夹绝对路径,这里是演示,具体以实际打印为准:

3、这里找到的路径为:
/home/ubuntu/aubo_ws/src/aubo_robot/aubo_driver/lib/lib644、执行如下命令新建ldconfig配置文件:
sudo gedit /etc/ld.so.conf.d/aubo_driver.conf5、将如下内容写入打开的配置文件(以实际环境为准,不可直接复制),保存退出。
/home/ubuntu/aubo_ws/src/aubo_robot/aubo_driver/lib/lib64/
/home/ubuntu/aubo_ws/src/aubo_robot/aubo_driver/lib/lib64/aubocontroller
/home/ubuntu/aubo_ws/src/aubo_robot/aubo_driver/lib/lib64/config
/home/ubuntu/aubo_ws/src/aubo_robot/aubo_driver/lib/lib64/log4cplus6、执行如下命令使能新建的配置文件即可正常使用。
sudo ldconfig(4)通过moveit接口控制机械臂速度与加速度无效
问题描述:使用ROS时,通过moveit的move_group接口setMaxVelocityScalingFactor或setMaxAccelerationScalingFactor设置机械臂的轨迹速度和加速度时,无论如何调整数值,轨迹速度均不发生变化?
解决办法:速度的调整需要在moveit包中的配置文件中进行调整,例如使用的是AUBO E5机器人,找到aubo_e5_moveit_config包中config下的joint_limits.yaml文件,增加6个关节的max_velocity值即可提高速度,建议逐步少量增加该值,以防机器人运动过快造成不必要的损失。

(5)虚拟机使用Gazebo仿真,出现闪退或空白
问题描述:使用虚拟机运行ROS环境,在使用Gazebo仿真环境时,gazebo启动后,出现闪退或界面一直处于空白?
解决办法:
1、在终端中关闭硬件加速
echo " export SVGA_VGPU10=0" >> ~/.bashrc
source ~/.bashrc2、关闭虚拟机的3D图形加速(需要关闭虚拟机后操作)

3、操作完上面的解决方法后,继续启动gazebo,界面还是一片空白,没有仿真的界面出现,需要先启动rviz。

4、需要按照这个顺序启动后,才能正常使用(需要说明的是,两条指令要在不同的终端运行)。
七. 2D机器视觉编程
(1)“加密狗未检测到或检测异常”
问题描述:“加密狗未检测到或检测异常”
解决方法:
1.打开VM软件需要在电脑上插加密狗,如果没有,则无法打开和正常使用软件;加密狗可联系销售询价和购买。
2.如果检查插有加密狗,但是加密狗没有亮,则可以尝试重装加密狗驱动。加密狗驱动位置在软件安装路径下: \VisionMaster3.3.1\Drivers\EliteIV。
安装方法:双击路径下的InstWiz3.exe进行安装
3.如果步骤2操作完后,发现加密狗还是不亮,打开设备管理器,查看是否有带感叹号的Elite4 5.x的提示,如下图:
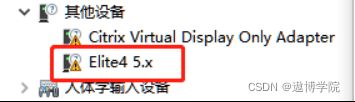
如果有,选中该设备,右键选择“更新驱动程序软件”,然后选择“浏览计算机以查找驱动程序软件”,路径选择加密狗驱动所在路径\VisionMaster3.3.1\Drivers\EliteIV;再选择下一步即可,等待驱动安装完成的提示即可。
4.如果加密狗已经安装上,在设备管理器中的会出现一个智能卡读卡器,如下图:

5.此时可再去尝试打开VM软件,看能否正常打开,如果还是存在问题,请联系技术支持进行排查。
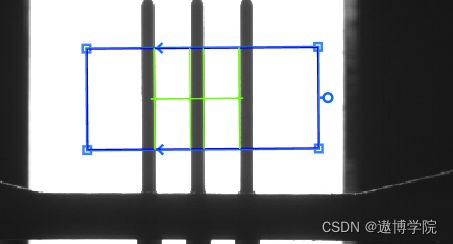
(2)间距检测无结果
问题描述:间距检测无结果

解决办法:
选择ROI区域,移动鼠标至ROI框的顶部小圆处,拖动鼠标使ROI区域框的箭头与被检测的间距方向大致垂直
(3)实时取流有图像,执行程序时图像源报错
问题描述:实时取流有图像,执行程序时图像源报错,怎么解决?
解决办法:
1、进入相机管理

2、选择相机

3、修改触发设置

(4)使用图片进行练习时,模板匹配成功,标定点乱序
问题描述:使用图片进行练习时,模板匹配成功,标定点乱序

解决办法:
该问题主要考虑图片添加顺序错误。
删除所有添加的图片,通过浏览文件夹的方式导入图片。

(5)使用图片进行练习时,图片不自动切换
问题描述:使用图片进行练习时,图片不自动切换
解决办法:
1、双击【图像源】工具,进入图像源属性设置

2、打开【自动切换】,打开【字符触发过滤】,输入字订阅到【TRIGGER_STRING[]】,此时,通讯设备接收到任何字符串都会触发方案。

3、如果需要指定的字符串触发,则在触发字符栏输入指定的字符例如“get”,此时只有当通讯设备接收到“get”字符串才会触发方案。

(6) 无法自动获取相机IP地址
问题描述:无法自动获取相机IP地址
解决方法:
设置网卡静态 ip通过“控制面板->网络与共享中心->更改适配器->本地连接->Internet 协议 4”对网卡 IP 进行静态分配

网卡 ip 设置为;192.168.1.100,子网掩码:255.255.255.0 即可(其他网段,根据需求设置,无特殊要求)。

相机静态 ip 设置 使用 MVS 自带的 ip 配置工具 Ip_Configurator,可对相机 ip 进行设置。

勾选状态可设的相机,点击左上角修改 ip

相机 ip 修改为上方推荐的网段内部即可,保持与网卡 ip 在同一网段

八. 3D机器视觉编程
(1)center软件部署消失
问题描述:center软件部署按键消失?
解决办法:
在 Mech-center 软件点击右侧【操作员】弹出选项单,切换为【管理员】。

输入密码初始密码【mechmind】点击【登录】切换权限。

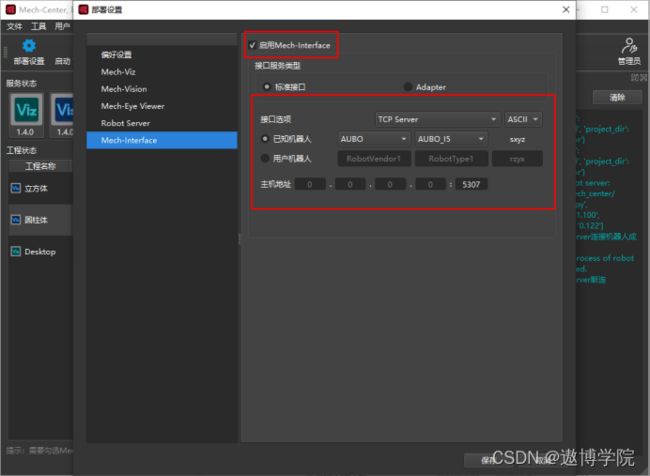
(2)相机非主控时如何把参数传给机器人
问题描述:相机非主控时如何把参数传给机器人?
解决办法:
进入Mech—Center软件界面打开部署,关闭Robot Server功能,启用【Mech-Interface】功能,参数默认即可,点击【保存】。
进入vision软件界面,找到【输出】功能添加到程序最后。


(3)相机内参检测失败
问题描述:相机检查内参失败?
解决办法:
在 Mech-Eye Viewer 软件中依次点击高级-->用户,勾选制造商,输入密码 mf,
进入制造商模式;
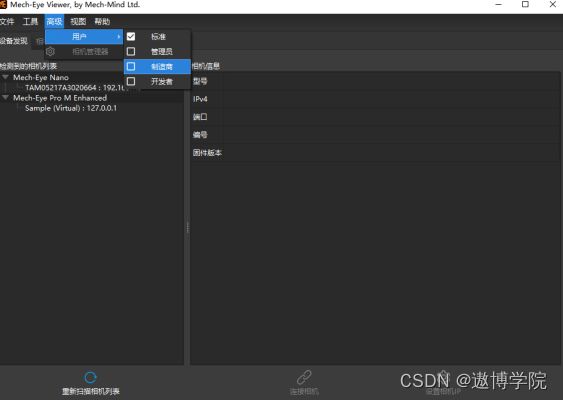
点击【连接】连接相机。

依次点击制造商-->相机标定,进入标定界面。

在添加标定板位姿操作区,选择手动添加位姿如图 5,添加 3-5 个不同的标定板位姿(平放摆放、2 到 4 不同方向的倾斜摆放即可,参考摆放位置分别如图所示。




点击“计算并发送到相机”,检查相机 ID,计算并更新内参。 完成后点击“评估标定精度”检查标定结果。
注意:进行内参快速矫正操作后需要重新进行外参标定且重新计算矫正参数。

(4)硬件连接正常IP配置正常viz软件已勾选自动加载当前工程连接不上机器人
问题描述:硬件连接正常IP配置正常viz软件已勾选自动加载当前工程连接不上机器人?
解决办法:
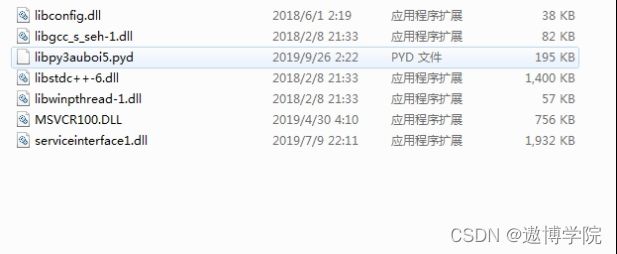
打开电脑C盘搜索python36wen文件夹,打开该文件夹中的DLLs文件夹。

联系工作人员索要【AUBO Python-Dlls】压缩包,解压该压缩包把全部文件复制到DLLs文件夹中,重启相机软件。
打开center软件。点击【连接机器人】,重启后第一次连接可能会失败,再次点击连接机器人即可。

(5)硬件连接正常IP配置正常无法连接机器人
问题描述:硬件连接正常IP配置正常无法连接机器人?
解决办法:
进入Mech—Center软件界面打开部署,启用Robot Server功能,机器人IP地址要与实际IP保存一致。

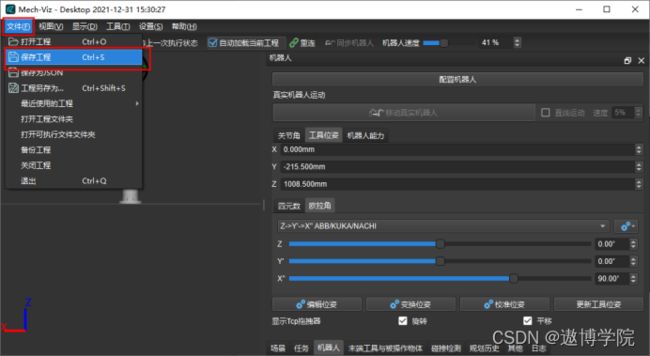
进入viz软件界面,点击【机器人】选择【配置机器人】,机器人品牌【aubo】机器人型号【i5】点击【ok】完成配置。

返回主界面勾选【自动加载当前工程】。

点击【文件】选择【保存工程】,保存完成后重启3D视觉软件即可。
遨博方源(北京)科技有限公司--为工业增智,为教育赋能!


关注遨博教育生态公众号,获取更多资讯 如需业务咨询,添加此微信号