ROS入门--tf坐标系统
古月老师ROS入门21讲的学习笔记
文章目录
-
-
- 机器人中的坐标变换
-
- TF功能包能干什么
- TF坐标变换如何实现
- tf坐标变换--海龟例子
- tf广播&监听编程实现
-
- 创建功能包
- tf广播器代码
- tf监听器代码
- 配置编译规则
- 编译并运行
-
机器人中的坐标变换
TF功能包能干什么
1.管理所有坐标系,所有坐标系底层数学逻辑都封装好了。
2.有时间属性,默认记录10s内所有坐标变换关系。
TF坐标变换如何实现
1.广播TF变换
2.监听TF变换
广播–监听机制,在ROS Master中启动tf之后,在后面维护着tf树,通过查询树来查询到坐标变换。
tf坐标变换–海龟例子
$ sudo apt-get install ros-melodic-turtle-tf
$ roslaunch turtle_tf turtle_tf_demo.launch
$ rosrun turtlesim turtle_teleop_key
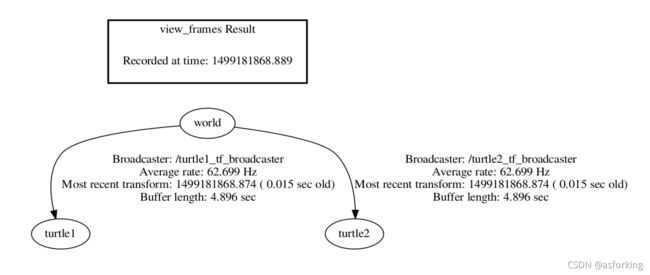
$ rosrun tf view_frames
1.roslaunch是用来启动一个.launch文件,包含许多节点,是一个脚本文件。后面可以通过编程来实现。
2.view_frames工具可以可视化看到所有tf关系。在打开终端的目录下输出一个frames.pdf文件。可以看到当前tf系统关系:world表示全局坐标系,表示整个仿真器的0点;turtle1和turtle2分别抽象为1个坐标系。
3.利用tf_echo命令行工具可以查看坐标系之间位置关系。分别有Translation和Rotation变换记录。
$ rosrun tf_echo turtle1 turtle2
4.利用rviz可视化工具查看。
$ rosrun rviz rviz -d `rospack find turtle_tf` /rviz/turtle_rivz.rivz
tf广播&监听编程实现
创建功能包
$ cd ~/catkin_ws/src
$ catkin_create_pkg learning_tf roscpp rospy tf turtlesim
tf广播器代码
在功能包的/src下创建turtle_tf_broadcaster.cpp实现一个tf广播器:
1.定义TF广播器TransformBroadcaster
2.创建坐标变换值
3.发布坐标变换sendTransform
#include tf监听器代码
在功能包的/src文件夹下创建turtle_tf_listener.cpp文件,实现一个tf监听器。
1.定义TF监听器 TransformLisrener
2.查找坐标变换(waitForTransform , lookupTransform)
#include 配置编译规则
配置功能包下的CMakeLists.txt文件
1.设置需要编译的代码和生成的可执行文件
2.设置链接库
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
编译并运行
1.编译
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.bash
2.运行
分别发布两只海龟的位置和world坐标系关系,__name:=turtle1_tf_broadcaster是重映射,会取代argv中的数据。这些运行的代码相当于在命令行中运行的.launch文件。
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
$ rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf_broadcaster /turtle2
$ rosrun learning_tf turtle_tf_listener
$ rosrun turtlesim turtle_teleop_key