eigen 列向量转矩阵_快速入门矩阵运算——开源库Eigen
矩阵是数学中一个重要的工具,广泛应用于各种场景下的数值分析,例如,数字信号处理,图像处理等。我们如何在程序中使用矩阵进行运算呢?本文将为大家介绍一个开源的矩阵运算工具——Eigen。
Eigen is a C++ template library for linear algebra: matrices, vectors, numerical solvers, and related algorithms.
Eigen是一个用于线性运算的C++ 模板库,支持 矩阵和矢量运算,数值分析及其相关的算法。
安装Eigen比较简单需要,从官网下载源码并解压即可,我现在的是最新的eigen-3.3.7版本。
官网下载地址:
http://eigen.tuxfamily.org/index.php?title=Main_Page
我们可以进入Eigen目录,可以发现Eigen库主要包括如下几个模块组成:
- Core:Matrix和Array类,基础的线性代数运算和数组操作;
- Geometry:旋转,平移,缩放,2维和3维的各种变换;
- LU:求逆,行列式,LU分解;
- Cholesky:LLT和LDLT Cholesky分解;
- Householder:Householder变换;
- SVD:SVD分解;
- QR:QR分解。
- Eigenvalues:特征值,特征向量分解。
- Sparse:稀疏矩阵的存储和运算。
- Dense:包含了Core、Geometry、LU、Cholesky、SVD、QR、Eigenvalues等模块。
- Eigen:包含了Dense和Sparse模块。

Eigen的食用方法非常之简单,在使用时我们只需要从解压后的文件目录中找到需要使用的库,然后,在源代码中包含相应的库即可食用了。因为Eigen是用模板写的模板库,所以只能把头文件包含进来使用。W君是在工程工作目录解压的,请参考如下代码包含Eigen库。
#include "eigen_3_3_7/Eigen/Eigen"Matrix和Array模板类
Eigen库提供有Matrix和Array两种模板类。它们定义如下:
typedef Matrix MyMatrixType;typedef Array MyArrayType;其中,通常我们会根据需要设置前三个参数,其它为默认值即可。
- Scalar:指定元素类型,比如,float, double, bool, int 等。
- RowsAtCompileTime:指定行数或者设置成动态(Dynamic);
- ColsAtCompileTime:指定列数或者设置成动态(Dynamic);
- Options:标志位,可以是ColMajor或RowMajor,默认是ColMajor;
从上面可以看出,行数和列数是允许固定大小,也允许动态大小的,所以下面的几种类型是可以的。
MatrixMatrixMatrixMatrixArrayArray另外,我们还可以使用Eigen库已经重定义的类型,下面是一些简单的例子可参考。

矩阵的定义和初始化
下面我们先看看Matrix模板类,它包含矩阵(Matrix)和向量(Vector),对于Vector来说,它也是一个矩阵,不过特殊的是行或者列数为1,我们称作行向量或者列向量。接下来我们来写个程序来看一下。
#include #include "eigen_3_3_7/Eigen/Eigen"int main(){ Eigen::MatrixXf matrix1(3,4); //定义了矩阵的大小,但是没有初始化。 Eigen::Vector3f vector1; matrix1 = Eigen::MatrixXf::Zero(3,4); //对矩阵进行初始化。 vector1 = Eigen::Vector3f::Ones(); std::cout << "------ matrix1 ------" << std::endl << matrix1 << std::endl; std::cout << "------ vector1 ------" << std::endl << vector1 << std::endl;}在上面的代码中,MatrixXf是一个行列可动态设置的矩阵,Vector3f是一个有3个元素的列向量。
typedef Matrix MatrixXf;typedef Matrix Vector3f;需要注意到是在定义矩阵大小时是没有初始化矩阵的,需要重新对矩阵进行初始化,这里是用Zero和Ones函数对其初始化,Zero是初始化为全0,而Ones是初始化为全1。最后,我们看一下执行结果。

当然,我们也可以给定任意值,每个值用逗号隔开,不过,这种方法只能适用于确定矩阵大小的情况下使用。
Eigen::MatrixXf matrix1(3,4); Eigen::Vector3f vector1; matrix1 << 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12; vector1 << 1, 2, 3;执行结果如下:

另外,我们还可以用()对某个元素进行访问,我们可以对其可读和可写。
Eigen::MatrixXf matrix1(3,4); Eigen::Vector3f vector1; matrix1 << 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12; vector1 << 1, 2, 3; matrix1(1,3) = 100; vector1(1) = 100;我们将matrix1的第2行,第4列修改成100;vector1的第2行修改成100,程序执行结果如下:

矩阵的基本运算
学习了矩阵的定义,那我们下面来看一下几个基本的矩阵运算。Matrix重载了+,+=,-,-+,×,×=,/,/=这几个基本的四则运算。
对于加减运算,需要注意一下几点:
- 左右矩阵的行列对应相等;
- 数据的类型也要相同,因为矩阵运算不支持隐式类型转换;
- 不支持和标量进行加减运算。
我们来看一个例子:
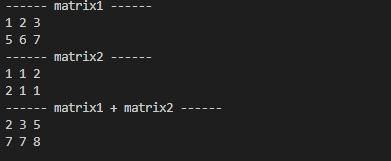
#include #include "eigen_3_3_7/Eigen/Eigen"int main(){ Eigen::MatrixXf matrix1(2,3); Eigen::MatrixXf matrix2(2,3); matrix1 << 1, 2, 3, 5, 6, 7; matrix2 << 1, 1, 2, 2, 1, 1; std::cout << "------ matrix1 ------" << std::endl << matrix1 << std::endl; std::cout << "------ matrix2 ------" << std::endl << matrix1 << std::endl; std::cout << "------ matrix1 + matrix2 ------" << std::endl << matrix1 + matrix2 << std::endl;}执行结果如下:
关于乘除法运算,矩阵支持矩阵和标量之间的乘除法运算,标量和矩阵中的每个元素相运算。
#include #include "eigen_3_3_7/Eigen/Eigen"int main(){ Eigen::MatrixXf matrix1(2,3); Eigen::MatrixXf matrix2(2,3); matrix1 << 1, 2, 3, 5, 6, 7; matrix2 << 1, 1, 2, 2, 1, 1; std::cout << "------ matrix1 ------" << std::endl << matrix1 << std::endl; std::cout << "------ matrix2 ------" << std::endl << matrix2 << std::endl; std::cout << "------ matrix1 * 2 ------" << std::endl << matrix1 * 2 << std::endl; std::cout << "------ matrix2 / 2 ------" << std::endl << matrix2 / 2 << std::endl;}执行结果如下:

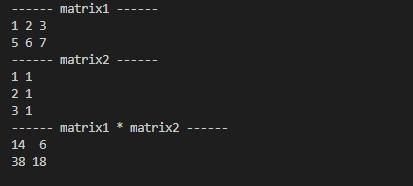
关于矩阵和矩阵之间的乘法,两个矩阵只有当左边的矩阵的列数等于右边矩阵的行数时,两个矩阵才可以进行矩阵的乘法运算 。如下图,左边矩阵第i行的元素逐个和右边矩阵第j列的元素相乘,乘积再相加,就是第i行,第j列的结果。对于Eigen库来说,它通过重载*运算符帮我们实现了这个运算过程,我们直接使用*运算符即可。

#include #include "eigen_3_3_7/Eigen/Eigen"int main(){ Eigen::MatrixXf matrix1(2,3); Eigen::MatrixXf matrix2(3,2); matrix1 << 1, 2, 3, 5, 6, 7; matrix2 << 1, 1, 2, 1, 3, 1; std::cout << "------ matrix1 ------" << std::endl << matrix1 << std::endl; std::cout << "------ matrix2 ------" << std::endl << matrix2 << std::endl; std::cout << "------ matrix1 * matrix2 ------" << std::endl << matrix1 * matrix2 << std::endl;}执行结果如下:
另外,还包括矩阵的转置、共轭和共轭转置等矩阵运算,在Eigen中分别是有transpose()、conjugate()、adjoint()函数可实现。
#include #include "eigen_3_3_7/Eigen/Eigen"int main(){ Eigen::MatrixXf matrix1(2, 3); Eigen::MatrixXf matrix2(2, 3); matrix1 << 1, 2, 3, 4, 5, 6; std::cout << "------ matrix1 ------" << std::endl << matrix1 << std::endl; // 转置 std::cout << "------ matrix1 transpose------" << std::endl << matrix1.transpose() << std::endl; // 共轭 std::cout << "------ matrix1 conjugate------" << std::endl << matrix1.conjugate() << std::endl; // 共轭转置 std::cout << "------ matrix1 adjoint------" << std::endl << matrix1.adjoint() << std::endl;}执行结果如下,不过,代码中实数的共轭还是其本身。

数组的定义和初始化
有的时候我们并不需要做线性代数矩阵运算,而只是做元素级的操作,这个时候就需要用到Array了。对Array来说,它和Matrix的定义和初始化的方式是一样的。
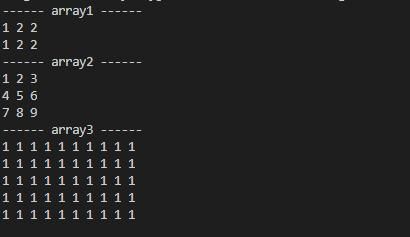
#include #include "eigen_3_3_7/Eigen/Eigen"int main(){ Eigen::ArrayXXf array1(2,3); Eigen::ArrayXXf array2(3,3); Eigen::ArrayXXf array3(5,10); array1(0,0) = 1; array1(0,1) = 2; array1(0,2) = 2; array1(1,0) = 1; array1(1,1) = 2; array1(1,2) = 2; array2 << 1, 2, 3, 4, 5, 6, 7, 8, 9; array3 = Eigen::ArrayXXf::Ones(5, 10); std::cout << "------ array1 ------" << std::endl << array1 << std::endl; std::cout << "------ array2 ------" << std::endl << array2 << std::endl; std::cout << "------ array3 ------" << std::endl << array3 << std::endl;}这里的ArrayXXf也是Eigen库重定义的,它行和列数可以动态设置。我们可以看到Array的初始化和Matrix也是类似的 。
typedef Array ArrayXXf;下面是执行结果:
数组的基本运算
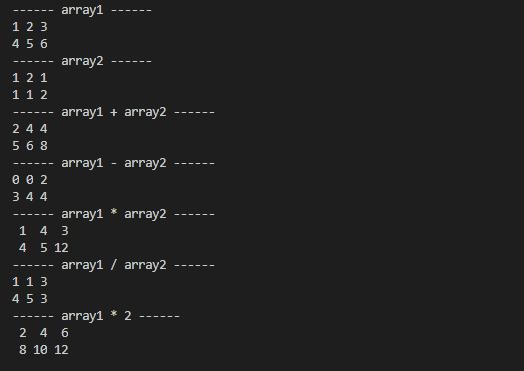
Array同样也重载了四则运算,但是,这里数据只是对数组内的元素做算术运算,而不是矩阵线性运算。所以,对于Array来数,两个数据的大小相同,即行数和行数相同,列数和列数相同,它的四则运算就是取两个数组相应位置的元素参与运算,运算的结果就是对应位置的值。
当然,也支持和标量之间的运算,数组中的每个元素都乘以这个标量,这个和矩阵一样。
#include #include "eigen_3_3_7/Eigen/Eigen"int main(){ Eigen::ArrayXXf array1(2, 3); Eigen::ArrayXXf array2(2, 3); array1 << 1, 2, 3, 4, 5, 6; array2 << 1, 2, 1, 1, 1, 2; std::cout << "------ array1 ------" << std::endl << array1 << std::endl; std::cout << "------ array2 ------" << std::endl << array2 << std::endl; std::cout << "------ array1 + array2 ------" << std::endl << array1 + array2 << std::endl; std::cout << "------ array1 - array2 ------" << std::endl << array1 - array2 << std::endl; std::cout << "------ array1 * array2 ------" << std::endl << array1 * array2 << std::endl; std::cout << "------ array1 / array2 ------" << std::endl << array1 / array2 << std::endl; std::cout << "------ array1 * 2 ------" << std::endl << array1 * 2 << std::endl;}执行结果:
Matrix和Array两者是可以相互转换的。Matrix类有array()方法,可将Matrix转换为Array。Array类有matrix()方法,可将Array转换成Matrix。
总之,Eigen是一个很不错的开源库,官网还有更加详细的文档,大家可以参考:
http://eigen.tuxfamily.org/dox/GettingStarted.html
http://eigen.tuxfamily.org/dox/group__TutorialMatrixClass.html
http://eigen.tuxfamily.org/dox/group__QuickRefPage.html
http://eigen.tuxfamily.org/dox/Eigen2ToEigen3.html