多传感器融合算法,雷视融合算法

0: 设备选型
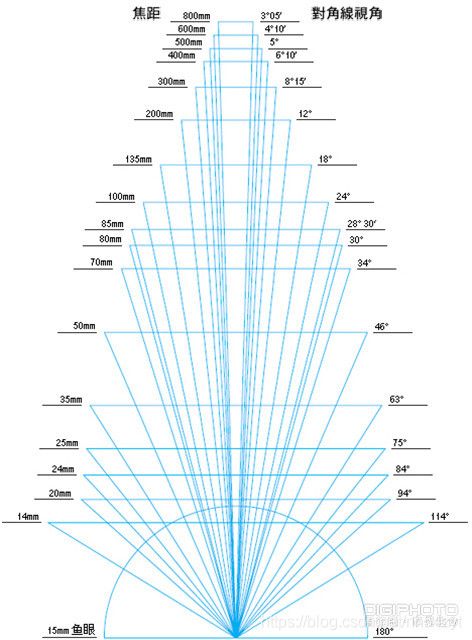
Camera选型: 如何选择视场角和焦距:
Radar选型

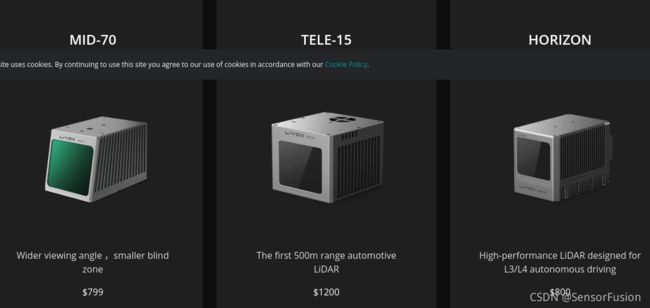
lidar选型
1: Radar毫米波雷达和Camera视觉融合
算法要求:
图像目标检测
Radar目标检测
radar和camera标定
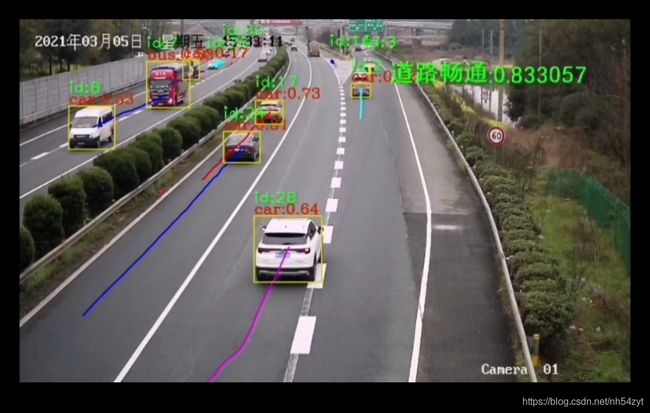
融合效果
例如:

可用作交通事件分析
2: Lidar激光雷达和Camera视觉融合
算法要求:
图像目标检测
Lidar目标检测
Lidar和camera标定
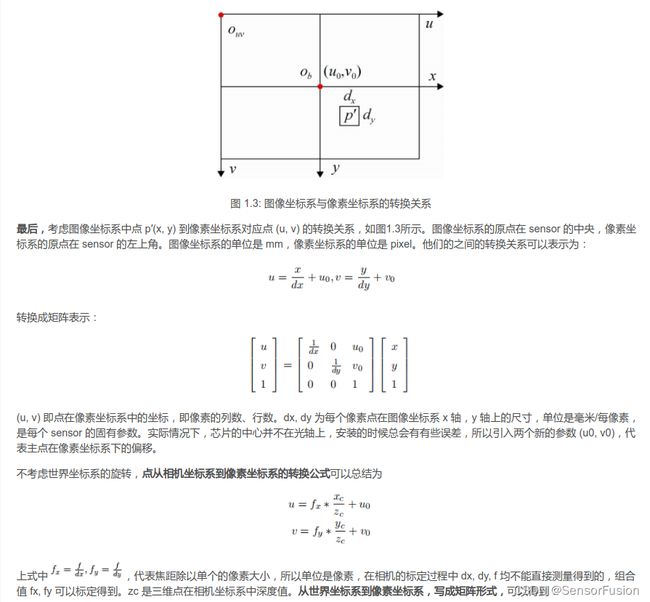
激光测距到相机像素深度值:
标定投影原理:
https://blog.csdn.net/tMb8Z9Vdm66wH68VX1/article/details/120499743
zc 是三维点在相机坐标系中深度值。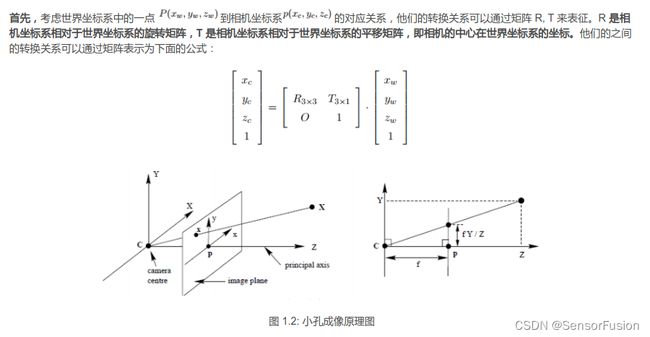


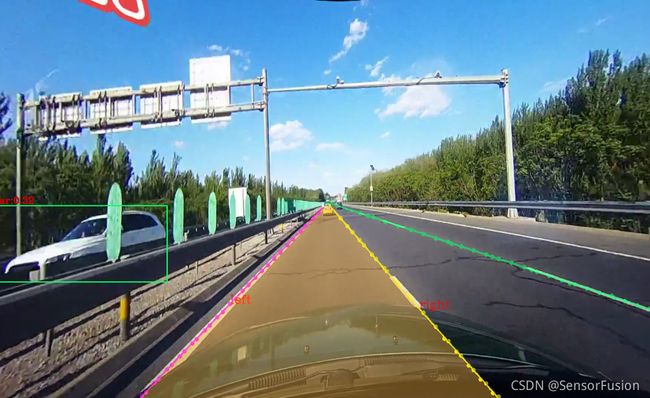
效果展示:
左边图像目标检测和融合效果
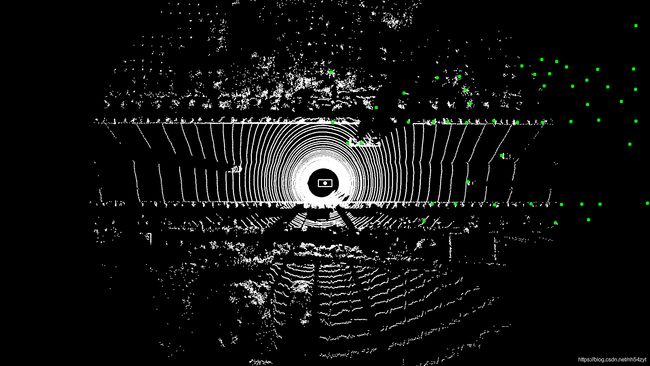
右边Lidar目标检测
基于图像深度学习目标检测
基于激光雷达的深度学习目标检测
融合目标,重新画框显示可视化,赋予车辆速度信息

3: Lidar激光雷达和Radar毫米波雷达融合
算法要求:
图像目标检测
Radar目标检测
Radar和camera标定
融合的前提之跟踪算法
4: camera跟踪算法
匈牙利算法(又叫KM算法)就是用来解决分配问题的一种方法,它基于定理:
如果代价矩阵的某一行或某一列同时加上或减去某个数,则这个新的代价矩阵的最优分配仍然是原代价矩阵的最优分配。
算法步骤(假设矩阵为NxN方阵):
1:对于矩阵的每一行,减去其中最小的元素
2:对于矩阵的每一列,减去其中最小的元素
3:用最少的水平线或垂直线覆盖矩阵中所有的0
4:如果线的数量等于N,则找到了最优分配,算法结束,否则进入步骤
5:找到没有被任何线覆盖的最小元素,每个没被线覆盖的行减去这个元素,每个被线覆盖的列加上这个元素,返回步骤3
图像的跟踪算法的理解
在跟踪之前,对所有目标已经完成检测,实现了特征建模过程。
- 第一帧进来时,以检测到的目标初始化并创建新的跟踪器,标注id。
- 后面帧进来时,先到卡尔曼滤波器中得到由前面帧box产生的状态预测和协方差预测。求跟踪器所有目标状态预测与本帧检测的box的IOU,通过匈牙利指派算法得到IOU最大的唯一匹配(数据关联部分),再去掉匹配值小于iou_threshold的匹配对。
https://blog.csdn.net/u011837761/article/details/52058703 - 用本帧中匹配到的目标检测box去更新卡尔曼跟踪器,计算卡尔曼增益、状态更新和协方差更新,并将状态更新值输出,作为本帧的跟踪box。对于本帧中没有匹配到的目标重新初始化跟踪器。
其中,卡尔曼跟踪器联合了历史跟踪记录,调节历史box与本帧box的残差,更好的匹配跟踪id。
message WeightParam {
optional float appearance = 1 [default = 0];
optional float motion = 2 [default = 0];
optional float shape = 3 [default = 0];
optional float tracklet = 4 [default = 0];
optional float overlap = 5 [default = 0];
}
message OmtParam {
optional int32 img_capability = 1 [default = 7];
optional int32 lost_age = 2 [default = 2];
optional int32 reserve_age = 3 [default = 3];
optional WeightParam weight_same_camera = 4;
optional WeightParam weight_diff_camera = 5;
optional float border = 9 [default = 30];
optional float target_thresh = 10 [default = 0.65];
optional bool correct_type = 11 [default = false];
optional TargetParam target_param = 12;
optional float min_init_height_ratio = 13 [default = 17];
optional float target_combine_iou_threshold = 14 [default = 0.5];
optional float fusion_target_thresh = 15 [default = 0.45];
optional float image_displacement = 16 [default = 50];
optional float abnormal_movement = 17 [default = 0.3];
optional double same_ts_eps = 18 [default = 0.05];
optional ReferenceParam reference = 19;
optional string type_change_cost = 20;
}
如果采用算法,可以综合以下,计算关联矩阵
float sa = ScoreAppearance(targets_[i], objects[j]);
float sm = ScoreMotion(targets_[i], objects[j]);
float ss = ScoreShape(targets_[i], objects[j]);
float so = ScoreOverlap(targets_[i], objects[j]);
if (sa == 0) {
hypo.score =
omt_param_.weight_diff_camera().motion() * sm
+ omt_param_.weight_diff_camera().shape() * ss
+ omt_param_.weight_diff_camera().overlap() * so;
} else {
hypo.score = (omt_param_.weight_same_camera().appearance() * sa +
omt_param_.weight_same_camera().motion() * sm +
omt_param_.weight_same_camera().shape() * ss +
omt_param_.weight_same_camera().overlap() * so);
}
5: Lidar跟踪算法
https://blog.csdn.net/lemonxiaoxiao/article/details/108645427
perception/lidar/lib/tracker/multi_lidar_fusion/mlf_track_object_matcher.cc
void MlfTrackObjectMatcher::Match(
const MlfTrackObjectMatcherOptions &options,
const std::vector<TrackedObjectPtr> &objects,
const std::vector<MlfTrackDataPtr> &tracks,
std::vector<std::pair<size_t, size_t>> *assignments,
std::vector<size_t> *unassigned_tracks,
std::vector<size_t> *unassigned_objects) {
assignments->clear();
unassigned_objects->clear();
unassigned_tracks->clear();
if (objects.empty() || tracks.empty()) {
unassigned_objects->resize(objects.size());
unassigned_tracks->resize(tracks.size());
std::iota(unassigned_objects->begin(), unassigned_objects->end(), 0);
std::iota(unassigned_tracks->begin(), unassigned_tracks->end(), 0);
return;
}
BipartiteGraphMatcherOptions matcher_options;
matcher_options.cost_thresh = max_match_distance_;
matcher_options.bound_value = bound_value_;
BaseBipartiteGraphMatcher *matcher =
objects[0]->is_background ? background_matcher_ : foreground_matcher_;
common::SecureMat<float> *association_mat = matcher->cost_matrix();
association_mat->Resize(tracks.size(), objects.size());
ComputeAssociateMatrix(tracks, objects, association_mat);
matcher->Match(matcher_options, assignments, unassigned_tracks,
unassigned_objects);
for (size_t i = 0; i < assignments->size(); ++i) {
objects[assignments->at(i).second]->association_score =
(*association_mat)(assignments->at(i).first,
assignments->at(i).second) /
max_match_distance_;
}
}
float MlfTrackObjectDistance::ComputeDistance(
const TrackedObjectConstPtr& object,
const MlfTrackDataConstPtr& track) const {
bool is_background = object->is_background;
const TrackedObjectConstPtr latest_object = track->GetLatestObject().second;
std::string key = latest_object->sensor_info.name + object->sensor_info.name;
const std::vector<float>* weights = nullptr;
if (is_background) {
auto iter = background_weight_table_.find(key);
if (iter == background_weight_table_.end()) {
weights = &kBackgroundDefaultWeight;
} else {
weights = &iter->second;
}
} else {
auto iter = foreground_weight_table_.find(key);
if (iter == foreground_weight_table_.end()) {
weights = &kForegroundDefaultWeight;
} else {
weights = &iter->second;
}
}
if (weights == nullptr || weights->size() < 7) {
AERROR << "Invalid weights";
return 1e+10f;
}
float distance = 0.f;
float delta = 1e-10f;
double current_time = object->object_ptr->latest_tracked_time;
track->PredictState(current_time);
double time_diff =
track->age_ ? current_time - track->latest_visible_time_ : 0;
if (weights->at(0) > delta) {
distance +=
weights->at(0) * LocationDistance(latest_object, track->predict_.state,
object, time_diff);
}
if (weights->at(1) > delta) {
distance +=
weights->at(1) * DirectionDistance(latest_object, track->predict_.state,
object, time_diff);
}
if (weights->at(2) > delta) {
distance +=
weights->at(2) * BboxSizeDistance(latest_object, track->predict_.state,
object, time_diff);
}
if (weights->at(3) > delta) {
distance +=
weights->at(3) * PointNumDistance(latest_object, track->predict_.state,
object, time_diff);
}
if (weights->at(4) > delta) {
distance +=
weights->at(4) * HistogramDistance(latest_object, track->predict_.state,
object, time_diff);
}
if (weights->at(5) > delta) {
distance += weights->at(5) * CentroidShiftDistance(latest_object,
track->predict_.state,
object, time_diff);
}
if (weights->at(6) > delta) {
distance += weights->at(6) *
BboxIouDistance(latest_object, track->predict_.state, object,
time_diff, background_object_match_threshold_);
}
// for foreground, calculate semantic map based distance
// if (!is_background) {
// distance += weights->at(7) * SemanticMapDistance(*track, object);
// }
return distance;
}
/******************************************************************************
* Copyright 2018 The Apollo Authors. All Rights Reserved.
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*****************************************************************************/
#include ‘’‘
’‘’
6:Radar跟踪算法
bool HMMatcher::Match(const std::vector<RadarTrackPtr> &radar_tracks,
const base::Frame &radar_frame,
const TrackObjectMatcherOptions &options,
std::vector<TrackObjectPair> *assignments,
std::vector<size_t> *unassigned_tracks,
std::vector<size_t> *unassigned_objects) {
IDMatch(radar_tracks, radar_frame, assignments, unassigned_tracks,
unassigned_objects);
TrackObjectPropertyMatch(radar_tracks, radar_frame, assignments,
unassigned_tracks, unassigned_objects);
return true;
}
bool HMMatcher::RefinedTrack(const base::ObjectPtr &track_object,
double track_timestamp,
const base::ObjectPtr &radar_object,
double radar_timestamp) {
double dist = 0.5 * DistanceBetweenObs(track_object, track_timestamp,
radar_object, radar_timestamp) +
0.5 * DistanceBetweenObs(radar_object, radar_timestamp,
track_object, track_timestamp);
return dist < BaseMatcher::GetMaxMatchDistance();
}
void HMMatcher::TrackObjectPropertyMatch(
const std::vector<RadarTrackPtr> &radar_tracks,
const base::Frame &radar_frame, std::vector<TrackObjectPair> *assignments,
std::vector<size_t> *unassigned_tracks,
std::vector<size_t> *unassigned_objects) {
if (unassigned_tracks->empty() || unassigned_objects->empty()) {
return;
}
std::vector<std::vector<double>> association_mat(unassigned_tracks->size());
for (size_t i = 0; i < association_mat.size(); ++i) {
association_mat[i].resize(unassigned_objects->size(), 0);
}
ComputeAssociationMat(radar_tracks, radar_frame, *unassigned_tracks,
*unassigned_objects, &association_mat);
// from perception-common
common::SecureMat<double> *global_costs =
hungarian_matcher_.mutable_global_costs();
global_costs->Resize(unassigned_tracks->size(), unassigned_objects->size());
for (size_t i = 0; i < unassigned_tracks->size(); ++i) {
for (size_t j = 0; j < unassigned_objects->size(); ++j) {
(*global_costs)(i, j) = association_mat[i][j];
}
}
std::vector<TrackObjectPair> property_assignments;
std::vector<size_t> property_unassigned_tracks;
std::vector<size_t> property_unassigned_objects;
hungarian_matcher_.Match(
BaseMatcher::GetMaxMatchDistance(), BaseMatcher::GetBoundMatchDistance(),
common::GatedHungarianMatcher<double>::OptimizeFlag::OPTMIN,
&property_assignments, &property_unassigned_tracks,
&property_unassigned_objects);
for (size_t i = 0; i < property_assignments.size(); ++i) {
size_t gt_idx = unassigned_tracks->at(property_assignments[i].first);
size_t go_idx = unassigned_objects->at(property_assignments[i].second);
assignments->push_back(std::pair<size_t, size_t>(gt_idx, go_idx));
}
std::vector<size_t> temp_unassigned_tracks;
std::vector<size_t> temp_unassigned_objects;
for (size_t i = 0; i < property_unassigned_tracks.size(); ++i) {
size_t gt_idx = unassigned_tracks->at(property_unassigned_tracks[i]);
temp_unassigned_tracks.push_back(gt_idx);
}
for (size_t i = 0; i < property_unassigned_objects.size(); ++i) {
size_t go_idx = unassigned_objects->at(property_unassigned_objects[i]);
temp_unassigned_objects.push_back(go_idx);
}
*unassigned_tracks = temp_unassigned_tracks;
*unassigned_objects = temp_unassigned_objects;
}
void HMMatcher::ComputeAssociationMat(
const std::vector<RadarTrackPtr> &radar_tracks,
const base::Frame &radar_frame,
const std::vector<size_t> &unassigned_tracks,
const std::vector<size_t> &unassigned_objects,
std::vector<std::vector<double>> *association_mat) {
double frame_timestamp = radar_frame.timestamp;
for (size_t i = 0; i < unassigned_tracks.size(); ++i) {
for (size_t j = 0; j < unassigned_objects.size(); ++j) {
const base::ObjectPtr &track_object =
radar_tracks[unassigned_tracks[i]]->GetObs();
const base::ObjectPtr &frame_object =
radar_frame.objects[unassigned_objects[j]];
double track_timestamp =
radar_tracks[unassigned_tracks[i]]->GetTimestamp();
double distance_forward = DistanceBetweenObs(
track_object, track_timestamp, frame_object, frame_timestamp);
double distance_backward = DistanceBetweenObs(
frame_object, frame_timestamp, track_object, track_timestamp);
association_mat->at(i).at(j) =
0.5 * distance_forward + 0.5 * distance_backward;
}
}
}
double HMMatcher::DistanceBetweenObs(const base::ObjectPtr &obs1,
double timestamp1,
const base::ObjectPtr &obs2,
double timestamp2) {
double time_diff = timestamp2 - timestamp1;
return (obs2->center - obs1->center -
obs1->velocity.cast<double>() * time_diff)
.head(2)
.norm();
}
‘’‘
’‘’
‘’‘
7:Camera和Radar融合算法




’‘’
‘’‘
’‘’
‘’‘
8:Lidar和Camera融合入算法
#include 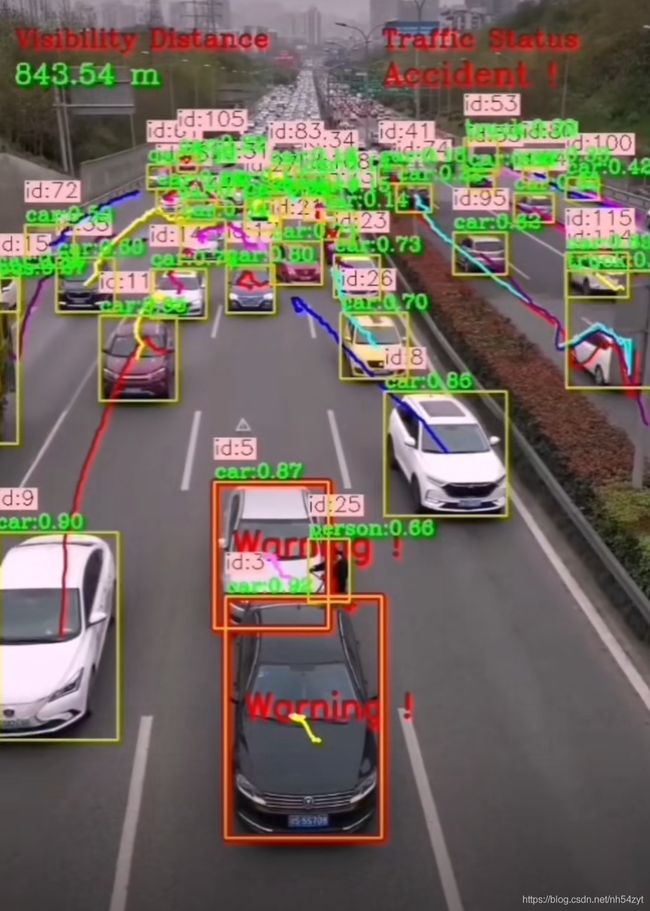
9: 雷视融合应用定速巡航+车道保持