pytorch学习(二十五)——从零实现多GPU训练
文章目录
-
- 1. 数据并行性
- 2. 从零开始实现多GPU训练
-
- 2.1 修改LenNet网络
- 2.2 数据同步
- 2.3 数据分发
- 2.4 数据训练
- 3. 简介实现多GPU并行运算
- 4. 总结
参考李沐老师动手学深度学习V2(强烈推荐看看书):
[1] https://zh-v2.d2l.ai/chapter_computational-performance/multiple-gpus.html
[2] https://zh-v2.d2l.ai/chapter_computational-performance/multiple-gpus-concise.html
[3] https://blog.csdn.net/jerry_liufeng/article/details/119808916?spm=1001.2014.3001.5501: 这是我自己总结的CPU和GPU的基础知识,后面还有单机多卡并行的基础。包括数据并行和模型并行。
只要GPU的现存足够,数据并行是最方便的。
1. 数据并行性

利用两个GPU上的数据,并行计算小批量随机梯度下降。
K个GPU的并行运算过程:
- 在任何一次迭代中,将给定的随机小批量样本分成k份,均匀地分配到GPU上
- 每个GPU根据分配的小批量子集,计算模型参数的损失和梯度
- 将k个GPU中的局部梯度聚合,获得整个批次数据的随机梯度
- 聚合梯度并将这个梯度分发到每个GPU之中
- 每个GPU使用小批量随机梯度,来更新其所维护的完整的模型参数集
2. 从零开始实现多GPU训练
%matplotlib inline
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l
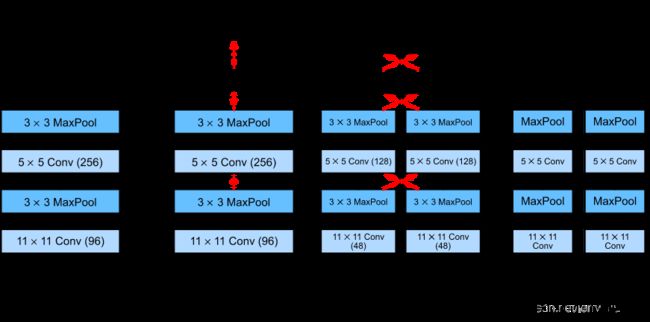
2.1 修改LenNet网络
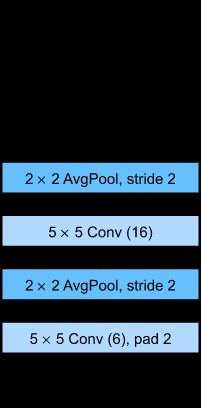
LeNet简化版
# 初始化模型参数
scale = 0.01
W1 = torch.randn(size=(20, 1, 3, 3)) * scale
b1 = torch.zeros(20)
W2 = torch.randn(size=(50, 20, 5, 5)) * scale
b2 = torch.zeros(50)
W3 = torch.randn(size=(800, 128)) * scale
b3 = torch.zeros(128)
W4 = torch.randn(size=(128, 10)) * scale
b4 = torch.zeros(10)
params = [W1, b1, W2, b2, W3, b3, W4, b4]
# 定义模型
def lenet(X, params):
h1_conv = F.conv2d(input=X, weight=params[0], bias=params[1])
h1_activation = F.relu(h1_conv)
h1 = F.avg_pool2d(input=h1_activation, kernel_size=(2, 2), stride=(2, 2))
h2_conv = F.conv2d(input=h1, weight=params[2], bias=params[3])
h2_activation = F.relu(h2_conv)
h2 = F.avg_pool2d(input=h2_activation, kernel_size=(2, 2), stride=(2, 2))
h2 = h2.reshape(h2.shape[0], -1)
h3_linear = torch.mm(h2, params[4]) + params[5]
h3 = F.relu(h3_linear)
y_hat = torch.mm(h3, params[6]) + params[7]
return y_hat
# 交叉熵损失函数
loss = nn.CrossEntropyLoss(reduction='none')
2.2 数据同步
get_params:将参数分配到不同的GPU上进行训练
def get_params(params,device):
new_params = [p.clone().to(device) for p in params]
for p in new_params:
p.requires_grad_() # setting calculate the grad
return new_params
new_params = get_params(params,d2l.try_gpu(0))
print('b1 weight',new_params[1])
print('b1 grad',new_params[1].grad)
b1 weight tensor([0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.],
device='cuda:0', requires_grad=True)
b1 grad None
allreduce:将所有向量相加,并将结果广播给所有的GPU
def allreduce(data):
for i in range(1,len(data)):
data[0][:] += data[i].to(data[0].device)
for i in range(1,len(data)):
data[i] = data[0].to(data[i].device)
data = [torch.ones((1,2),device=d2l.try_gpu(i))*(i+1) for i in range(2)]
print('before allredce:\n',data[0],'\n',data[1])
allreduce(data)
print('after allredce:\n',data[0],'\n',data[1])
tensor([[1., 1.]], device='cuda:0') tensor([[2., 2.]]) after allredce: tensor([[3., 3.]], device='cuda:0') tensor([[3., 3.]])`
data = torch.arange(20).reshape(4,5)
# 我沙雕了,只有一块gpu,我重复用两次不过分吧--
devices = [torch.device('cuda:0'),torch.device('cuda:0')]
split = nn.parallel.scatter(data,devices)
print('input:',data)
print('load into',devices)
print('output:',split)
input: tensor([[ 0, 1, 2, 3, 4], [ 5, 6, 7, 8, 9], [10, 11, 12, 13, 14], [15, 16, 17, 18, 19]]) load into [device(type='cuda', index=0),device(type='cuda', index=0)] output: (tensor([[0, 1, 2, 3, 4],[5, 6, 7, 8, 9]], device='cuda:0'), tensor([[10, 11, 12, 13, 14], [15, 16, 17, 18, 19]], device='cuda:0'))
2.3 数据分发
split_batch:将输入batch拆分到多个设备上
def split_batch(X,y,devices):
assert X.shape[0] == y.shape[0]
return (nn.parallel.scatter(X,devices),
nn.parallel.scatter(y,devices))
2.4 数据训练
在一个小批量上实现多GPU训练
def train_batch(X,y,device_params,devices,lr):
# 将小batch分配到每一个GPU上分别计算梯度
X_shards,y_shards = split_batch(X,y,devices)
ls = [
loss(lenet(X_shard,devices_W),y_shard).sum() for X_shard,y_shard,devices_W in zip(X_shards,y_shards,device_params)
]
# 分别进行梯度后传
for l in ls:
l.backward()
# 将每个GPU求得的对应数据的梯度相加或得整个数据的梯度,然后进行广播到每一个GPU上
with torch.no_grad():
for i in range(len(device_params[0])):
allreduce([device_params[c][i].grad for c in range(len(devices))])
# 每个GPU做对应的梯度更新
for param in device_params:
d2l.sgd(param,lr,X.shape[0])
def train(num_gpus, batch_size, lr):
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
devices = [d2l.try_gpu(i) for i in range(num_gpus)]
# 将模型参数复制到`num_gpus`个GPU
device_params = [get_params(params, d) for d in devices]
num_epochs = 10
animator = d2l.Animator('epoch', 'test acc', xlim=[1, num_epochs])
timer = d2l.Timer()
for epoch in range(num_epochs):
timer.start()
for X, y in train_iter:
# 为单个小批量执行多GPU训练
train_batch(X, y, device_params, devices, lr)
torch.cuda.synchronize()
timer.stop()
# 在GPU 0上评估模型
animator.add(epoch + 1, (d2l.evaluate_accuracy_gpu(
lambda x: lenet(x, device_params[0]), test_iter, devices[0]),))
print(f'test acc: {animator.Y[0][-1]:.2f}, {timer.avg():.1f} sec/epoch '
f'on {str(devices)}')
train(num_gpus=1, batch_size=256, lr=0.2)
test acc: 0.82, 2.9 sec/epoch on [device(type='cuda', index=0)]

单GPU效率
train(num_gpus=2, batch_size=256, lr=0.2)
test acc: 0.80, 3.0 sec/epoch on [device(type='cuda',index=0), device(type='cuda', index=1)]
双GPU效率
3. 简介实现多GPU并行运算
import torch
from torch import nn
from d2l import torch as d2l
定义一个ResNet-18网络。(使用更小的卷集核、步长和填充,而且删除了最大汇聚层。)
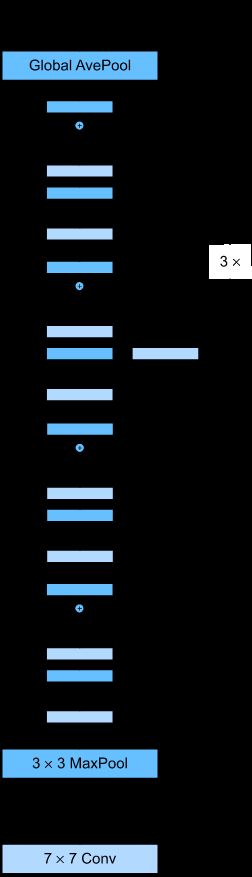
ResNet-18
#@save
def resnet18(num_classes, in_channels=1):
"""稍加修改的 ResNet-18 模型。"""
def resnet_block(in_channels, out_channels, num_residuals,
first_block=False):
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(d2l.Residual(in_channels, out_channels,
use_1x1conv=True, strides=2))
else:
blk.append(d2l.Residual(out_channels, out_channels))
return nn.Sequential(*blk)
# 该模型使用了更小的卷积核、步长和填充,而且删除了最大汇聚层。
net = nn.Sequential(
nn.Conv2d(in_channels, 64, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(64),
nn.ReLU())
net.add_module("resnet_block1", resnet_block(64, 64, 2, first_block=True))
net.add_module("resnet_block2", resnet_block(64, 128, 2))
net.add_module("resnet_block3", resnet_block(128, 256, 2))
net.add_module("resnet_block4", resnet_block(256, 512, 2))
net.add_module("global_avg_pool", nn.AdaptiveAvgPool2d((1,1)))
net.add_module("fc", nn.Sequential(nn.Flatten(),
nn.Linear(512, num_classes)))
return net
net = resnet18(10)
# 获取GPU列表
devices = d2l.try_all_gpus()
# 我们将在训练代码实现中初始化网络
def train(net, num_gpus, batch_size, lr):
train_iter, test_iter = load_data_fashion_mnist(batch_size)
devices = [d2l.try_gpu(i) for i in range(num_gpus)]
def init_weights(m):
if type(m) in [nn.Linear, nn.Conv2d]:
nn.init.normal_(m.weight, std=0.01)
net.apply(init_weights)
# 在多个 GPU 上设置模型
net = nn.DataParallel(net, device_ids=devices) # 告诉需要哪些GPU
trainer = torch.optim.SGD(net.parameters(), lr)
loss = nn.CrossEntropyLoss()
timer, num_epochs = d2l.Timer(), 10
animator = d2l.Animator('epoch', 'test acc', xlim=[1, num_epochs])
for epoch in range(num_epochs):
net.train()
timer.start()
for X, y in train_iter:
trainer.zero_grad()
X, y = X.to(devices[0]), y.to(devices[0])
l = loss(net(X), y)
l.backward()
trainer.step()
timer.stop()
animator.add(epoch + 1, (d2l.evaluate_accuracy_gpu(net, test_iter),))
print(f'test acc: {animator.Y[0][-1]:.2f}, {timer.avg():.1f} sec/epoch '
f'on {str(devices)}')
train(net, num_gpus=1, batch_size=256, lr=0.1)
test acc: 0.93, 76.9 sec/epoch on [device(type='cuda', index=0)] >```

单GPU效率(pytorch简洁实现)
总结一下:pytorch简介实现其实就是在训练的过程中加入了一句
net = nn.DataParallel(net, device_ids=devices),从而告诉了网络需要给其分配哪些GPU来进行并行运算。其自动实现了我们第二节中的各种方法。
4. 总结
-
有多种方法可以在多个 GPU 上拆分深度网络的训练。拆分可以在层之间、跨层或跨数据上实现。前两者需要对数据传输过程进行严格编排,而最后一种则是最简单的策略。拆分网络层、拆分网络和拆分数据(拆分数据最简单)
-
数据并行训练本身是不复杂的,它通过增加有效的小批量数据量的大小提高了训练效率。
-
在数据并行中,数据需要跨多个 GPU 拆分,其中每个 GPU 执行自己的前向传播和反向传播,随后所有的梯度被聚合为一,之后聚合结果向所有的 GPU 广播。
-
小批量数据量更大时,学习率也需要稍微提高一些。经验之谈:批量batch_size越大,其learning rate也因该对应变大
-
神经网络可以在(可找到数据的)单 GPU 上进行自动评估。pytorch和其他架构中都集成好了,调用即可
-
注意每台设备上的网络需要先初始化,然后再尝试访问该设备上的参数,否则会遇到错误。注意验证自己是否有这些GPU,看我就只有一个。。然后强行脑部自己有多个,精神胜利法
-
优化算法在多个 GPU 上自动聚合。