opencv函数大全
官网
http://wiki.opencv.org.cn/index.php/Cv照相机定标和三维重建
目录
[隐藏]
- 1 针孔相机模型和变形
- 2 照相机定标
- 2.1 ProjectPoints2
- 2.2 FindHomography
- 2.3 CalibrateCamera2
- 2.4 FindExtrinsicCameraParams2
- 2.5 Rodrigues2
- 2.6 Undistort2
- 2.7 InitUndistortMap
- 2.8 FindChessboardCorners
- 2.9 DrawChessBoardCorners
- 3 姿态估计
- 3.1 CreatePOSITObject
- 3.2 POSIT
- 3.3 ReleasePOSITObject
- 3.4 CalcImageHomography
- 4 对极几何(双视几何)
- 4.1 FindFundamentalMat
- 4.2 ComputeCorrespondEpilines
- 4.3 ConvertPointsHomogenious
博客
[转发官网的贴图]OpenCV中findFundamentalMat函数使用的模型
https://blog.csdn.net/u011867581/article/details/43818183
[原][c++]基于opencv3的本质矩阵(essential matrix)估计算例
https://blog.csdn.net/J10527/article/details/51295099
[PCV库的使用][求解基础矩阵和本质矩阵]Python计算机视觉-对极几何与基础矩阵
https://blog.csdn.net/weixin_42557926/article/details/89359675
undistortPoints
undistortPoints()函数用法总结
https://blog.csdn.net/yong_qi2015/article/details/52946821
https://answers.opencv.org/question/28632/undistortpoints-with-python/
[官网]
https://docs.opencv.org/3.0.0/da/d54/group__imgproc__transform.html
findEssentialMat
计算本质矩阵
https://stackoverflow.com/questions/33906111/how-do-i-estimate-positions-of-two-cameras-in-opencv
https://blog.csdn.net/Pandas_xxx/article/details/80674691
cv2.findChessboardCorners(gray, (11,8), None)跑不动了
[代码可参考,只是算得太久,可以现将图片resize到几百的尺寸,就快了.
另外注意设置的角点数量是内点,即假如格子数量8*8,内点数量是7*7]
https://bbs.csdn.net/topics/392561780
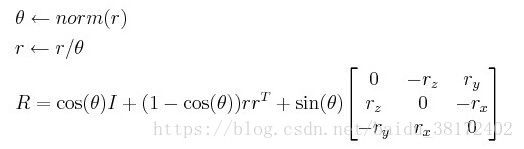
Rodrigues
罗德里格斯(Rodrigues)公式,实现旋转向量与旋转矩阵的相互转换。
solvePnP
已知:相机内参、畸变系数、同一组点的世界坐标系坐标、图像坐标系坐标,
求解:外参
python:
retval, rvec, tvec = cv2.solvePnP(objectPoints=objpoints[0], imagePoints=imgpoints[0], cameraMatrix=mtx, distCoeffs=dist)
objectPoints - 世界坐标系下的控制点的坐标,vector
imagePoints - 在图像坐标系下对应的控制点的坐标。vector
cameraMatrix - 相机的内参矩阵
distCoeffs - 相机的畸变系数
以上两个参数通过相机标定可以得到。相机的内参数的标定参见:http://www.cnblogs.com/star91/p/6012425.html
rvec - 输出的旋转向量。使坐标点从世界坐标系旋转到相机坐标系
tvec - 输出的平移向量。使坐标点从世界坐标系平移到相机坐标系
flags - 默认使用CV_ITERATIV迭代法
https://www.jianshu.com/p/b97406d8833c