蓝牙AOA高精度定位
01
—
蓝牙AOA定位技术原理
2019 年初,蓝牙技大联盟宣布蓝牙 5.1 引入了新的“寻向”功能,这个功能可检测蓝牙信号的方向,将大幅提高蓝牙定位的精确度,提供更好的位置服务, 结束了以往通过 RSSI 信号强度的方式做低精度指纹定位的历史,为蓝牙技大解决物联网精确定位与导航问题奠定了基础。
依据被定位终端的上下行模式的不同,蓝牙高精度定位可以分为两种技大原理,分别是:AoA 到达角度法(Angle of Arrival)和 AoD 出发角度法(Angle of Departure)。其技大原理如下所示:

到达角度法(AOA)是利用单一天线发射寻向讯号,而接收端的装置内建天线阵列,当信号通过时,会因阵列中接收到的不同距离,产生相位差异,进而计算出相对的信号方向;出发角度法(AOD)则与前者相反,由巳经固定位置具备天线阵列的设备来发送信号,传给单一天线终端,终端可以透过接收的信号计算出来波方向,进而定位。
| 类型 |
发射端 |
接收端 |
| AOA |
定位终端,单天线,处理简单 |
定位基站,IQ 采样,处理复杂 |
| AOD |
定位基站,天线阵列,处理简单 |
定位终端,IQ 采样,处理复杂 |
无论是 AOA 还是 AOD,其角度检测的基本原理是通过天线阵列获取信号在不同阵元上的相位差,然后通过信号角度估计算法获得来波方向信息。蓝牙 5.1 标准协议为了更好地支持 AOA/AOD, 专门制定了信号 IQ 采样及 CTE(Const Tone Extension)的相关技术要求。下面将详细介绍基于 CTE 的来波方向检测原理。
1) 信号的相位差及 IQ 采样
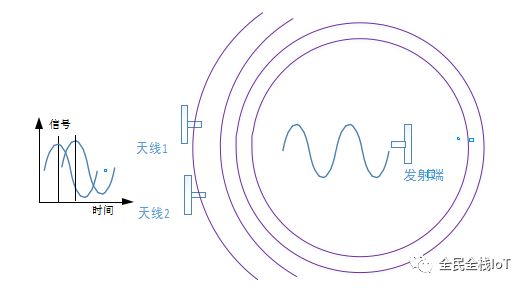
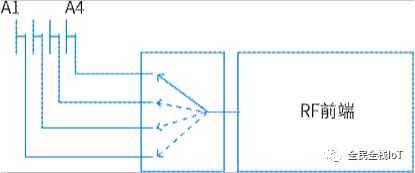
以两天线为例,如图 所示,当定频信号从发射端发出时,电磁波会到达天线 1 和天线 2,由于天线 1 和天线 2 的空间位置不同,信号到达两个天线的波程不一样,进而相位也会产生差异。不同的来波方向会产生不同的相位差异。射频芯片可以通过对每个天线上的信号进行 IQ 采样获得相位信息,对比 2 个天线上的相位信息可以获得相位差。
2) 基于相位差的来波方向检测
当两个天线足够近时(小于半波长),可消除相位差的整周期模糊,能够唯一的确定来波的方向。如图所示,其中λ为发送信号波长、Δφ 为天线 1 和2 接收到同一信号的相位差,θ为待求的信号到达角度(AoA),d 为两个天线间的距离,由图示关系可得:
θ = arcsin(λΔφ/2πd)
3) CTE 标准规范
蓝牙信号是调制信号,其调制特性本身就会带来相位的变化,不利于直接采样计算相位差,故蓝牙 5.1 规范规定了 CTE 标准,目的是使得相位差检测更加方便。
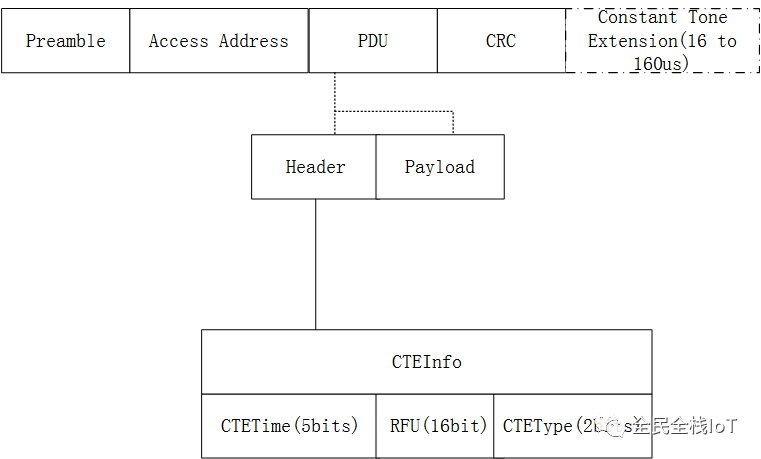
CTE 是定频(250kHz)无调制的信号,可非常方便地用于相位差检测。它的时长 16us 到 160us,无 CRC 校验,支持厂播模式和连接模式两种类型。如图所示,CTE 信号是附加在 CRC 校验之后的信号,不影响原来的数据内容。是否具有 CTE,在 PDU 的 header 中可以指定,包含对CTE 类型的设定(AOA,AOD 1us,AOD 2us)以及 CTE 的时长设定。
蓝牙 5.1 协议规定了 CTE 的切换/采样时隙,如图所示。CTE 的处理过程可以分为初始的 4us 的守卫时间(用于和前面的信号分开,保证不于扰), 8us 的参考时间(对第一个天线进行 8 个 IQ 采样)以及后续一系列的采样和切换时间片。天线切换仅在 Switch slot 完成,采样仅在 Sample slot 完成。天线的切换模式可以通过 HCI 命令设置。
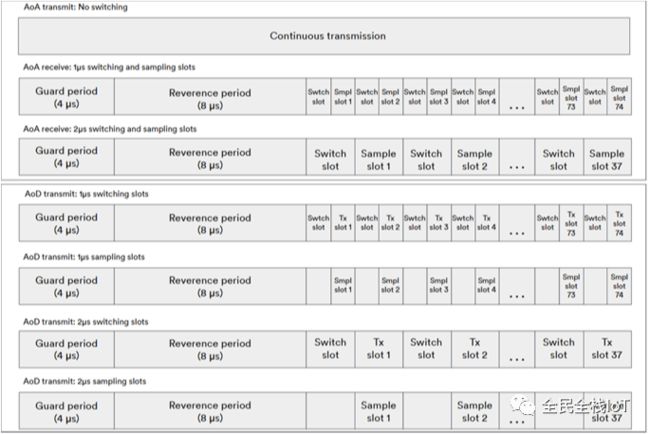
CTE 的切换时隙
4) 天线阵列角度估计方法
实际应用中,一般常用线阵、矩形阵、圆阵等不同的天线阵列进行信号检测。线阵是一维的,所有天线位于一条直线上,可以获取方位角。矩形阵和圆阵可以获取二维角度(方位角和俯仰角)。天线阵列波达方向处理方法巳有大量的研究, 常用的有多重信号分类(MUSIC)算法、最大似然算法、ESPRIT 算法、压缩感知算法等。
基于 CTE 的方式要求定位终端支持 BLE 5.1,对于大量存量的 BLE 4.2 的设备,也可以通过类 CTE 方式,发送特殊的厂播包来实现高精度定位。
02
—
蓝牙AOA定位系统架构
获取信号的波达方向后,据此可以进行定位解算,下面阐述基础定位原理。
单基站定位:如果被定位终端的高度变化较小,可以采用固定高度的单基站。
二维定位方法:如图所示。通过 AOA 角度估计可以获得从基站出发的一根射线,该射线和定位终端的高度平面相交便可获得平面坐标。从图中可以看出,单基站的定位覆盖是以基站为中心的锥形区域,距离基站越远,相同角度误差带来的平面坐标的变化越大,位置误差也就越大,越靠近基站定位精度越好。可以通过适当提高终端到基站的高度差 H,来提高高精度定位区域的覆盖范图。
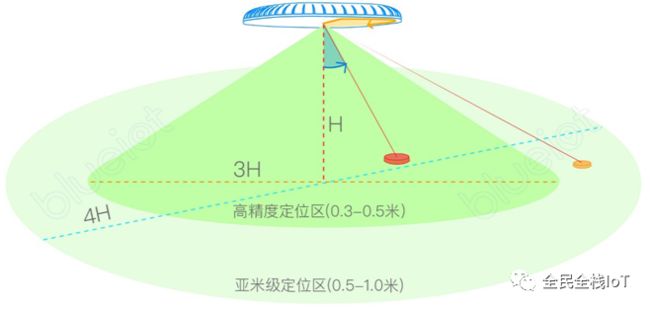
图 单基站定位
多基站定位:在单基站二维定位的基础上,进行各定位基站的大规模组网, 多基站航向角联合解算,实现更大范图的高精度定位的全覆盖。
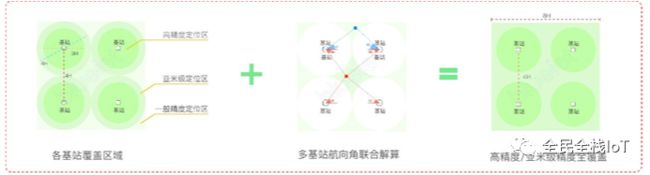
图 多基站定位
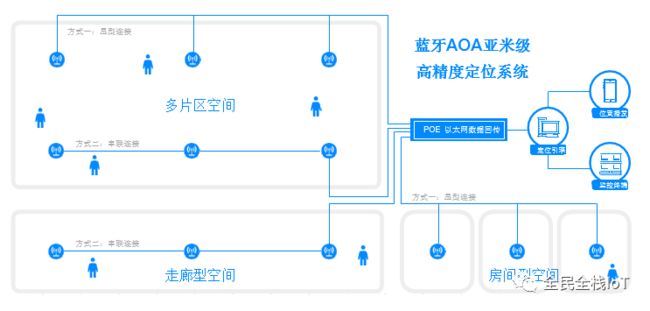
定位系统架构:常见的定位系统架构如图所示。分为定位感知、定位计算、定位应用三个部分。定位感知包含蓝牙定位终端和定位基站,按定位要求的不同,可以分为多片区空间的二维部署,走廊型空间的一维部署和房间型空间的零位部署。定位基站通过有线网络同定位引擎进行交互。定位引擎对各定位基站接收到的信号进行角度估计、定位解算(AOA 方式),或者控制定位基站进行位置播发(AOD 方式)。定位应用从定位引擎获取数据,结合具体业务,构建行业解决方案
03
—
蓝牙AOA定位技术挑战
蓝牙 AOA 定位技术若要稳定可靠地在应用场景中实现高精度定位,仍面临以下几个方面的挑战:
(1) 信号反射于扰
实际环境中,有很多金属、玻璃等光滑的反射面,AOA 基站除了可以接收到直达波之外,还会接收到反射波,如图所示。由于直达波和反射波是同颜的相于信号,AOA 基站接收的是它们信号叠加,很容易判断成来自另外一个错误方向的信号。

(2) 天线阵列误差
一方面,为了节省成本,商用的天线阵列常用的是采用射频开关切换的方式,切换过程本身会带来一些测量误差;另一方面,存在阵元的互耦、相位中心误差、取向误差等,所以用于测向的天线阵列设计是一项较为复杂的任务。
(3) 复杂楼层/区域环境
实际使用中,存在各种复杂的定位环境,如中空楼层情况下需要准确定位到楼层,多房间情况下需要准确地判断在哪个房间,被物理建筑隔开的各个区域间要顺畅地定位切换,都给高精度定位带来了不少挑战。
(4) 天线方向性扰动
各移动端设备随着放置位置的不同会呈现不同的天线方向性进而影响角度检测结果,需要能够适应不同的设备摆放状态。以上四点挑战的克服,需要在微波射频以及算法部分做较多的工作,考验AOA 定位解算平台提供商的技大实力。
听说关注公众号的都是大牛
