Tesla Bot 特斯拉机器人介绍
Tesla Bot



文章目录
- Tesla Bot
-
- 硬件架构
- 结构仿真
- 全身自由度
- 灵巧手
- 驱动原理
- 传感器配置
- 关节模组
- 视觉
-
- 环境识别
- 导航
- 运动控制
- 整机联动
- 人形机器人
- 参考
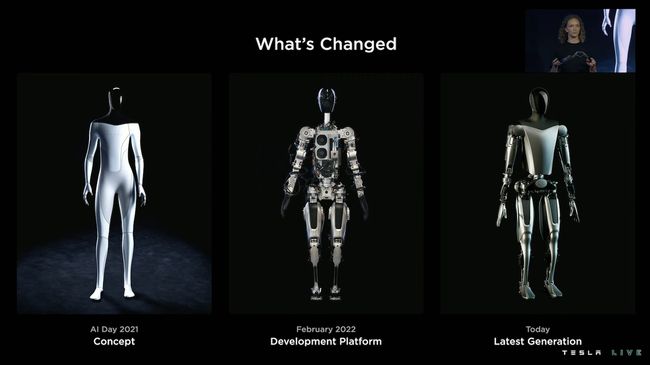
硬件架构
Tesla Optimus最高时速为 5 英里/小时(8 公里/小时),身高 5 英尺 8 英寸(1.72 米),重 57 公斤。
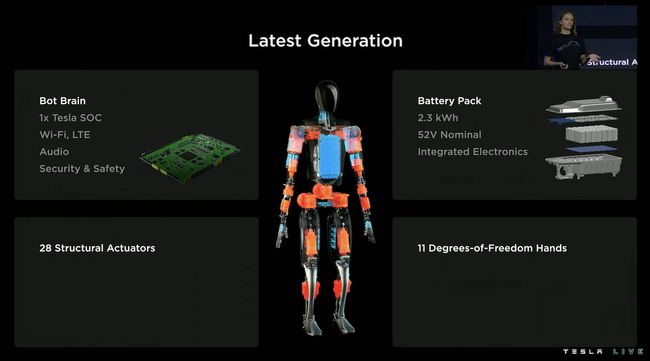
特斯拉基于仿生构建机器人平台之后,再依据量产的成本,能耗效率,规模化等需求贯穿机器人开发设计流程,例如减少运动部件中的零部件,来减重降能耗达到高效。动力电池的开发中央化,一块2.3kWh,52V 锂电池布置在机器人胸部,能量规划支撑机器人两天的运行,一块PCB板支持所有电池通讯以及充放电管理。预计量产后低于2w美元。
Tesla Optimus这套硬件架构的优势在于稳定可控易实现,相对来说实现成本低,技术成熟,主要劣势在于动态性能差,自重大,难以支撑高动态大幅度的运动性能。
结构仿真
利用汽车仿真进行机器人结构开发


- 从人体结构中得到灵感,通过设计4个支点的关节设计让运动情况下电机的输出是平顺的从而保证能效性。
全身自由度

身体总自由度数目为28(不包括灵巧手),具体分布如下:
- 左臂/右臂:7+7,肩部3+肘部1+手腕3;
- 左腿/右腿:6+6,髋部3+膝盖1+脚踝2;
- 腰部:2,Roll+Yaw;
腰部有2个自由度,形成了Roll+Yaw,这是Tesla做的非常好的地方,腰部增加额外的自由度,有助于各类仿生运动的实现,相比较于小米铁大缺失的腰部自由度,Optimus的一些动作能够呈现得更加自然,这是铁大需要向Optimus学习借鉴的地方。不过腰部的两个自由度设计也极具难度,整体上身的重量都压在这里,设计不佳极易造成上肢操作时的低刚度与抖动,locomotion的时候头部和手部的抖动幅度大。
灵巧手
-
驱动方式:绳驱;
-
自锁能力:反向自锁(通过电机输出连接蜗轮蜗杆机构,猜测利用蜗轮蜗杆反向自锁);
-
6个自由度:拇指2自由度(1个摆动,1个弯曲);其余四指各1个自由度;
-
11个关节:拇指3个关节,其余四指各2各关节;每根手指均为2个指节联动弯曲;
-
负载能力:约9kg(实际为机械臂某个特殊工况的负载能力,和灵巧手无关);
-
仿生性:绳驱,自适应抓握,仿生性较好;
驱动原理
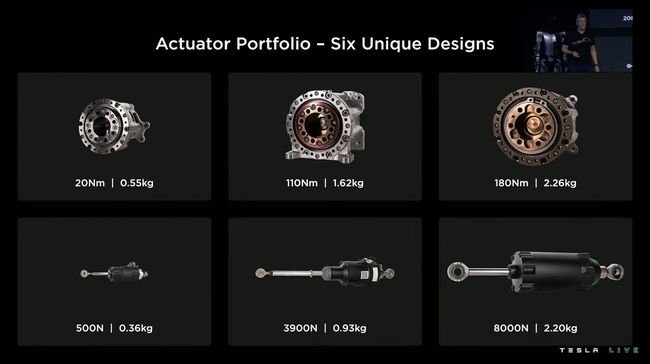
通过仿真工具进行仿真实验,综合考虑成本和重量,得到六种关节,包括三种旋转执行器,三种线性执行器。
整体采用电池组供电,搭配电驱伺服关节的形式,其中旋转关节采用无框电机+双编码器+力矩传感器+谐波的方案,和很多协作机器人关节一样,有力矩传感器加双编码器,能够精确的获得关节的力矩和输入输出位置信息,目前还不知道他的精度,精度和成本关系很大。
线性关节采用的无框电机+行星滚柱丝杠+力传感器,旋转关节整体的输出扭矩密度和当前各大人形机器人厂家的关节性能类似,线性关节能够提足够大得力输出,但极大牺牲了输出速度性能,可能会限制了下肢的高动态运动能力。
传感器配置
| 类型 | 视觉传感器 | 力觉传感器 | 位置传感器 | IMU |
|---|---|---|---|---|
| 描述 | 左/右柱相机 鱼眼相机 | 关节集成非接触式力矩传感器 | 关节集成双位置编码器 | NA |
关节模组
- 上肢采用无框电机+谐波减速器的旋转关节方案:
基本上和当前协作机械臂的关节方案高度类似,无框力矩电机+谐波减速器+高低速双编码器+抱闸+力矩传感器+输出端交叉滚子轴承。这套方案我觉得如果是用在固定基的协作机械臂上没有问题,而用在浮动基的双足上,是不是会显得太过笨重了,尤其是每个关节都集成抱闸。
-
下肢采用无框电机+行星丝杠的线性执行器方案:
一般丝杠的传动精度高,输出力能力强,但反驱透明度差,响应速度偏慢,这套驱动方案会极大限制下肢高动态的运动能力,同时成本也不低。
下肢这个关节方案较上肢关节相比缺少了抱闸,使用了本身就具备自锁能力的行星丝杠将旋转运动转化为线性。
视觉
环境识别
特斯拉机器人采用3个摄像头,应该都布置在头部,一个前部鱼眼摄像头,左右应该各一个视觉摄像头,通过这样的视角布置基本模拟人类视角范围,但这个视角范围应该超过180度。视觉采用的算法是和特斯拉汽车一样的occupancy network 算法。
导航
特斯拉机器人采用兴趣点提取的方法,在视频流中逐帧跟踪高频兴趣点,和关键点,来识别所在位置直到目标地识别,这种算法目前还是比较高级也还在完善中。
前文中提到,视觉的相机硬件为左右单目相机+鱼眼,硬件成本低,但算法复杂、计算力大,依赖于硬件。下图中可以看到Optimus实现了精确的3D环境建模,同时通过双目测距能实现非常清晰和高精度的深度图像,非常有助于双臂的末端精确抓取。
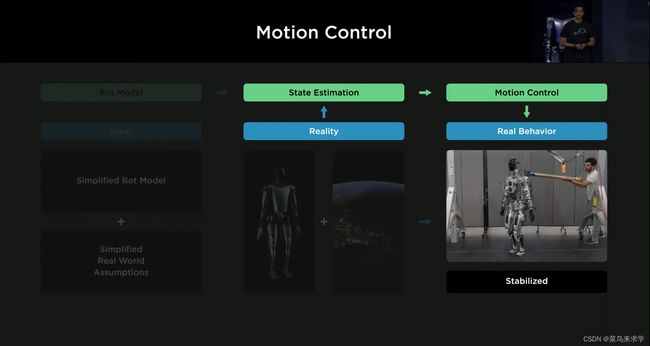
运动控制
行走对于机器人这是一个巨大的挑战,他牵扯到机器人的自我意识,能耗最优的步调,整机的平衡,动作的协调。
机器人首先根据感知的环境规划出期望的路径,再计算出脚步,产生运动行走轨迹路线,当然转化到机器人上面是各个执行器的扭矩速度输出。
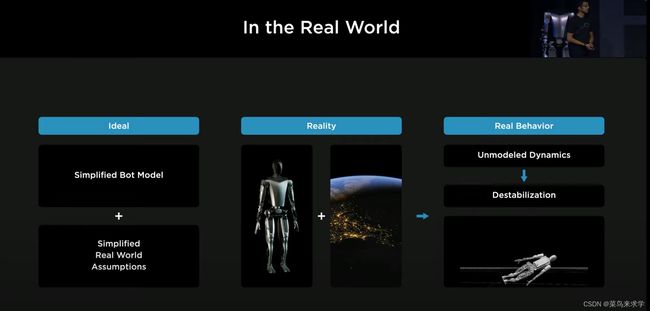
显然规划的时候是把环境看起来是完美的,机器人也是简化的,所以看起来容易,但现实世界控制确是异常的复杂,例如传感器的噪声,机器人的协调等等,所以特斯拉机器人对机器人的高度信息以及质心进行跟踪用来判断机器人的状态,来实现稳定,但是行走,却还关系整机的协调,这个时候就需要整机其他执行机构例如手臂等一起联动了。
- 运动规划

整体来说,Optimus的下肢行走还是运用的传统Static-ZMP、Linear-ZMP或DCM的方案,和Asimo类似,适合平脚板双足的慢速行走,抵抗外界大干扰能力较弱,动态性差。这边还提到了一个高效率的仿人步态,如下图,摆足时考虑了Toe-off-heel strike,结合上半身的协调摆臂运动,融合人类行走的数据,实现自然摆臂、大跨步以及尽可能的直膝行走,提高了行走效率与姿态。
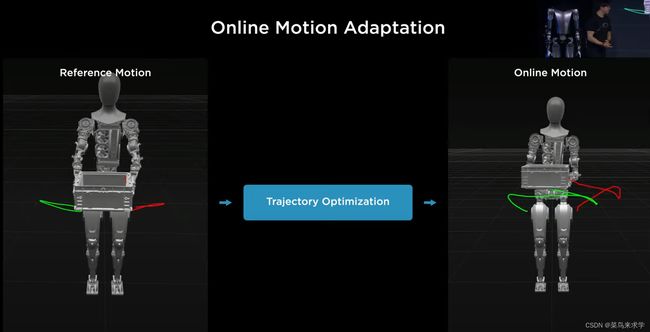
上肢操作首先借助动捕取得的人体离线运动库,然后进行离线优化与在线(针对具体任务场景的)优化,构建离线运动库的时候可能会用到模仿学习的某些技术,手臂的轨迹规划可能使用伯克利Trajopt的相关算法。
在仿真环境中训练出来的模型在真实环境中无法正常行走,通过引入真实世界的传感器数据来获得适应性
- 运动执行
整机联动
特斯拉采取的方法是,先采集人类各种姿势运动的自然联动参考,输入给机器人,机器人再根据现实情况进行调整,最后输出给机器人控制。

自然运动参考
运动自适应
人形机器人
- 小米 cyber one
- 波士顿动力Atlas机器人
参考
- 知乎 https://www.zhihu.com/question/557190222/answer/2698348338
- 知乎 https://www.zhihu.com/question/557190222/answer/2697301542
- 知乎 https://www.zhihu.com/question/529804102/answer/2697777545
- 知乎 https://zhuanlan.zhihu.com/p/569946777
- https://www.eet-china.com/mp/a165518.html