ros使用自动驾驶数据集KITTI【4】画出自己的车以及照相机视野
画出自己的车以及照相机视野
1、画出车的模型(用已有模型)
2、画出相机图片的视野范围
代码结构:
kitti.py
-data_utils.py
-publish_utils.py
data_utils.py
data_utils.py负责从数据集中读取camera数据和point cloud数据。
data_utils.py代码:
#!/usr/bin/python
import cv2
import numpy as np
import os
def read_camera(path):
return cv2.imread(path)
def read_point_cloud(path):
return np.fromfile(path,dtype = np.float32).reshape(-1,4)
publish_utils.py
publish_utils.py中写了若干个publish函数,发布主题。这些函数在kitti.py中调用。
publish_utils.py代码:
#!/usr/bin/python
import numpy as np
import rospy
from std_msgs.msg import Header
from visualization_msgs.msg import Marker
from sensor_msgs.msg import Image,PointCloud2
import sensor_msgs.point_cloud2 as pcl2
from cv_bridge import CvBridge
from geometry_msgs.msg import Point
import tf
FRAME_ID = 'map'
def publish_camera(cam_pub,bridge,img):
cam_pub.publish(bridge.cv2_to_imgmsg(img, "bgr8"))
def publish_point_cloud(pcl_pub,point_cloud):
header = Header()
header.stamp = rospy.Time.now()
header.frame_id = FRAME_ID
pcl_pub.publish(pcl2.create_cloud_xyz32(header, point_cloud[:, :3]))
#draw a ego-car model
def publish_ego_car(ego_car_pub):
marker = Marker()
marker.header.frame_id = FRAME_ID
marker.header.stamp = rospy.Time.now()
marker.id = 0 #each marker have only one id.
marker.action = Marker.ADD #to tell marker the operation is add a new marker
marker.lifetime = rospy.Duration() #marker's life time.how long it appears in the frame.
marker.type = Marker.LINE_STRIP # marker's type.Today we use line_strip.
marker.color.r = 0.0
marker.color.g = 1.0
marker.color.b = 0.0
marker.color.a = 1.0 #apparent degree,transparency
marker.scale.x = 0.2 #scale of line
#marker's data
marker.points = []
marker.points.append(Point(10, -10, 0))
marker.points.append(Point(0, 0, 0)) # (0,0,0)is the location of velodyne LiDAR
marker.points.append(Point(10, 10, 0))
ego_car_pub.publish(marker)
#show a car model by means of 'MESH_RESOURCE'
def publish_car_model(model_pub):
mesh_marker = Marker() # build a class of Marker
mesh_marker.header.frame_id = FRAME_ID
mesh_marker.header.stamp = rospy.Time.now()
mesh_marker.id = -1 # each marker have only one id.
mesh_marker.action = Marker.ADD # to tell marker the operation is add a new marker
mesh_marker.lifetime = rospy.Duration() # marker's life time.how long it appears in the frame.
mesh_marker.type = Marker.MESH_RESOURCE # marker's type.Today we use MESH_RESOURCE.
#mesh_marker.mesh_resource = "package://kitti_tutorial/Audi R8/Audi R8.dae"
mesh_marker.mesh_resource = "package://kitti_tutorial/Audi R8/BMW X5 4.dae"
#set height
mesh_marker.pose.position.x = 0.0
mesh_marker.pose.position.y = 0.0
mesh_marker.pose.position.z = -1.73
#set rotation
q = tf.transformations.quaternion_from_euler(np.pi/2,0,np.pi)
mesh_marker.pose.orientation.x = q[0]
mesh_marker.pose.orientation.y = q[1]
mesh_marker.pose.orientation.z = q[2]
mesh_marker.pose.orientation.w = q[3]
mesh_marker.color.r = 0.0
mesh_marker.color.g = 1.0
mesh_marker.color.b = 0.0
mesh_marker.color.a = 1.0
mesh_marker.scale.x = 0.9
mesh_marker.scale.y = 0.9
mesh_marker.scale.z = 0.9
model_pub.publish(mesh_marker)
kitti.py
kitti.py中,是主函数,调用另外两个文件中的读取和发布函数,完成每个主题的发布。每个消息发布出去时,主要经过3个步骤:
- 建立一个Publisher;
- 读入数据;
- 发布主题。
kitti.py代码:
#!/usr/bin/python
import rospy
from data_utils import *
from publish_utils import *
DATA_PATH = '/home/ros/Documents/ros-kitticlass/2011_09_26/2011_09_26_drive_0005_sync'
if __name__ == '__main__':
frame = 0
rospy.init_node('litti_node',anonymous=True)
cam_pub = rospy.Publisher('kitti_cam', Image, queue_size=10) #step 1: build a Publisher
pcl_pub = rospy.Publisher('kitti_point_cloud', PointCloud2, queue_size=10) #PointCloud2
ego_pub = rospy.Publisher('Kitti_ego_car',Marker,queue_size=10)
model_pub = rospy.Publisher('Kitti_car_model',Marker,queue_size=10)
bridge = CvBridge()
rate = rospy.Rate(10)
while not rospy.is_shutdown():
#picture read and publish
image = read_camera(os.path.join(DATA_PATH,'image_02/data/%010d.png'%frame)) #step 2: read in data
publish_camera(cam_pub,bridge,image) #step 3: publish out. Done!
#point cloud read and publish
point_cloud = read_point_cloud(os.path.join(DATA_PATH,'velodyne_points/data/%010d.bin'%frame))
publish_point_cloud(pcl_pub,point_cloud)
publish_ego_car(ego_pub)
publish_car_model(model_pub)
rospy.loginfo("published")
rate.sleep()
frame+=1
frame%=154
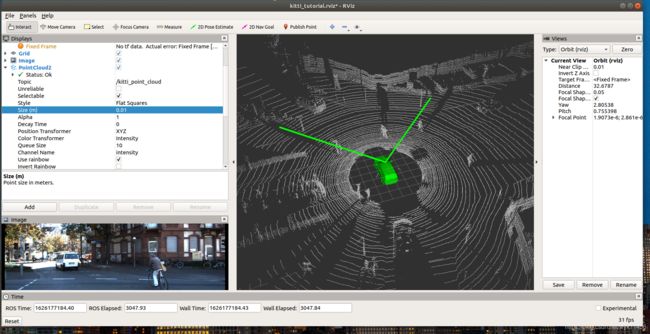
最终效果
加入视野范围效果:
加入模型效果: