opencv学习笔记14(自定义线性滤波)
自定义线性滤波
- 卷积概念
- 卷积操作
- filter2D()函数
- 常见算子
- 自定义卷积模糊
- 结果演示
- 代码实现
卷积概念
- 卷积是图像处理中一个操作,是kernel在图像的每个像素上的操作。
- Kernel本质上一个固定大小的矩阵数组,其中心点称为锚点(anchor point)

卷积操作
- 把kernel放到像素数组之上,求锚点周围覆盖的像素乘积之和(包括锚点),用来替换锚点覆盖下像素点值称为卷积处理。数学表达如下:


Sum = 8x1+6x1+6x1+2x1+8x1+6x1+2x1+2x1+8x1
New pixel = sum / (m*n)

filter2D()函数
参考链接:https://blog.csdn.net/keith_bb/article/details/53103026
此函数利用内核实现对图像的卷积运算
CV_EXPORTS_W void filter2D( InputArray src, OutputArray dst, int ddepth,
InputArray kernel, Point anchor=Point(-1,-1),
double delta=0, int borderType=BORDER_DEFAULT );
参数解释:
- InputArray src: 输入图像
- OutputArray dst: 输出图像,和输入图像具有相同的尺寸和通道数量
- int ddepth: 目标图像深度,如果没写将生成与原图像深度相同的图像。当depth输入值为-1时,目标图像和原图像深度保持一致。
- InputArray kernel: 卷积核(或者是相关核),一个单通道浮点型矩阵。如果想在图像不同的通道使用不同的kernel,可以先使用split()函数将图像通道事先分开。
- Point anchor: 内核的基准点(anchor),其默认值为(-1,-1)说明位于kernel的中心位置。基准点即kernel中与进行处理的像素点重合的点。
- double delta: 在储存目标图像前可选的添加到像素的值,默认值为0
- int borderType: 像素向外逼近的方法,默认值是BORDER_DEFAULT,即对全部边界进行计算。
常见算子
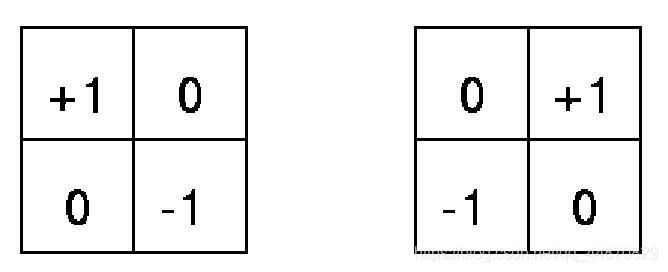
- Robert算子(左侧x方向,右侧y方向)
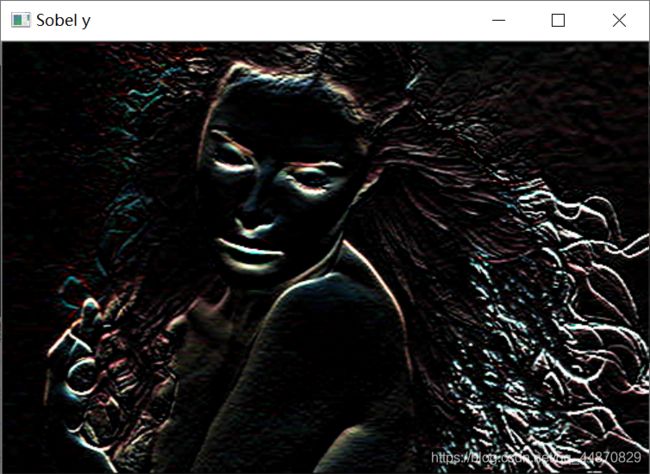
- Sobel算子(左侧x方向,右侧y方向)

- 拉普拉斯算子(当中间值为5时是锐化算子)

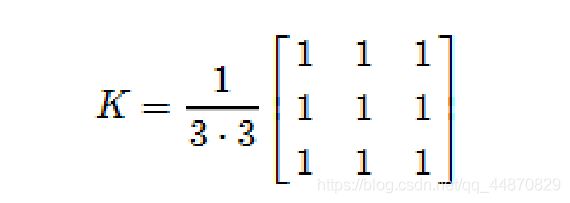
自定义卷积模糊
- filter2D方法filter2D(
Mat src, //输入图像
Mat dst, // 模糊图像
int depth, // 图像深度32/8
Mat kernel, // 卷积核/模板
Point anchor, // 锚点位置
double delta // 计算出来的像素+delta
)
其中 kernel是可以自定义的卷积核
结果演示
Robert 算子结果


sobel 算子结果

拉普拉斯算子结果

自定义模糊结果(卷积核大小为5*5时)

代码实现
#include<opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(){
Mat src = imread("G:/OpenCV/opencv笔记所用图片/1.jpg");
if (src.empty())
{
cout << "could not load image..." << endl;
getchar();
return -1;
}
Mat dst;
// robert X 方向
Mat kernel_x = (Mat_<int>(2, 2) << 1, 0, 0, -1); //定义robert的x方向的算子为卷积核
filter2D(src, dst, -1, kernel_x, Point(-1, -1), 0.0); //使用filter2D来对图像进行卷积操作(使用的卷积核已定义)
imshow("robert X",dst);
// robert y 方向
Mat kernel_y = (Mat_<int>(2, 2) << 0, 1, -1, 0); //定义robert的y方向的算子为卷积核
filter2D(src, dst, -1, kernel_y, Point(-1, -1), 0.0);
imshow("robert y", dst);
//sobel的算子比Robert要差异大一些
// Sobel X 方向
Mat Skernel_x = (Mat_<int>(3, 3) << -1, 0, 1, -2,0,2,-1,0,1); //定义sobel的x方向的算子为卷积核
filter2D(src, dst, -1, Skernel_x, Point(-1, -1), 0.0);
imshow("Sobel x", dst);
// Sobel Y 方向
Mat yimg;
Mat Skernel_y = (Mat_<int>(3, 3) << -1, -2, -1, 0,0,0, 1,2,1); //定义sobel的y方向的算子为卷积核
filter2D(src, yimg, -1, Skernel_y, Point(-1, -1), 0.0);
imshow("Sobel y", yimg);
// 拉普拉斯算子(边缘检测算子,得到的是主要的轮廓,当中间的值是5时是锐化算子)
Mat Lkernel = (Mat_<int>(3, 3) << 0, -1, 0, -1, 4, -1, 0, -1, 0);
filter2D(src, dst, -1, Lkernel, Point(-1, -1), 0.0);
imshow("拉普拉斯", dst);
//自定义卷积模糊
int c = 0;
int index = 0;
int ksize = 0;
//使用循环是其模糊程度自动加深
while (true) {
c = waitKey(600);
if ((char)c == 27) {// ESC
break;
}
ksize = 5 + (index % 8) * 2;
Mat kernel = Mat::ones(Size(ksize, ksize), CV_32F) / (float)(ksize * ksize); //定义一个大小变化的卷积核
filter2D(src, dst, -1, kernel, Point(-1, -1));
index++; //进行模糊自增
imshow("卷积模糊", dst);
}
waitKey(0);
return 0;
}