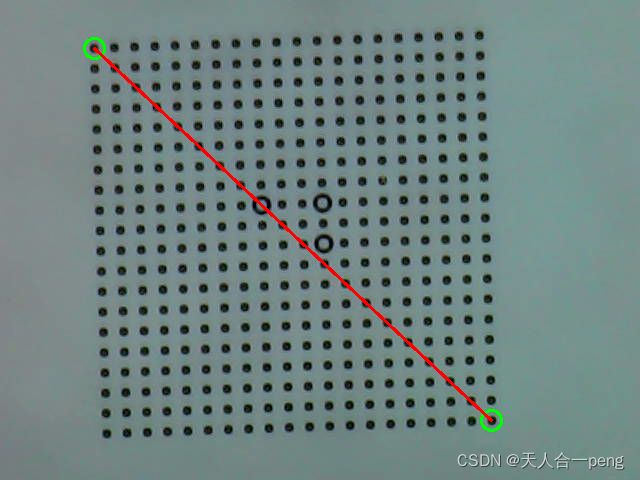
python opencv 找到圆点标定板所有点后通过距离找两个角点3
# coding:utf-8
import math
import cv2
import numpy as np
import xml.etree.ElementTree as ET
import matplotlib.pyplot as plt
global DPI
DPI = 0.00245
def mainFigure(img):
w = 20
h = 5
params = cv2.SimpleBlobDetector_Params()
# Setup SimpleBlobDetector parameters.
# print('params')
# print(params)
# print(type(params))
# Filter by Area.
params.filterByArea = True
params.minArea = 10e1
params.maxArea = 10e3
params.minDistBetweenBlobs = 25
# params.filterByColor = True
params.filterByConvexity = False
# tweak these as you see fit
# Filter by Circularity
# params.filterByCircularity = False
# params.minCircularity = 0.2
# params.blobColor = 0
# # # Filter by Convexity
# params.filterByConvexity = True
# params.minConvexity = 0.87
# Filter by Inertia
# params.filterByInertia = True
# params.filterByInertia = False
# params.minInertiaRatio = 0.01
gray= cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# Detect blobs.
# image = cv2.resize(gray_img, (int(img.shape[1]/4),int(img.shape[0]/4)), 1, 1, cv2.INTER_LINEAR)
# image = cv2.resize(gray_img, dsize=None, fx=0.25, fy=0.25, interpolation=cv2.INTER_LINEAR)
minThreshValue = 120
_, gray = cv2.threshold(gray, minThreshValue, 255, cv2.THRESH_BINARY)
gray = cv2.resize(gray, dsize=None, fx=2, fy=2, interpolation=cv2.INTER_LINEAR)
# plt.imshow(gray)
# cv2.imshow("gray",gray)
# 找到距离原点(0,0)最近和最远的点
detector = cv2.SimpleBlobDetector_create(params)
keypoints = detector.detect(gray)
# opencv
im_with_keypoints = cv2.drawKeypoints(gray, keypoints, np.array([]), (255, 0, 0), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
# plt
# fig = plt.figure()
# im_with_keypoints = cv2.drawKeypoints(gray, keypoints, np.array([]), (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
color_img = cv2.cvtColor(im_with_keypoints, cv2.COLOR_BGR2RGB)
DPIall = []
if keypoints is not None:
# 找到距离(0,0)最近和最远的点
kpUpLeft = []
disUpLeft = []
for i in range(len(keypoints)):
dis = math.sqrt(math.pow(keypoints[i].pt[0],2) + math.pow(keypoints[i].pt[1],2))
disUpLeft.append(dis)
kpUpLeft.append(keypoints[i].pt)
# 找到距离(640*2,0)最近和最远的点
kpUpRight = []
disUpRight=[]
for i in range(len(keypoints)):
# 最大距离坐标
dis2 = math.sqrt(math.pow(abs(keypoints[i].pt[0]-640*2),2) + math.pow(abs(keypoints[i].pt[1]),2))
disUpRight.append(dis2)
kpUpRight.append(keypoints[i].pt)
if disUpRight and disUpLeft:
disDownLeftIndex = disUpRight.index(max(disUpRight))
pointDL = kpUpRight[disDownLeftIndex]
disUpRightIndex = disUpRight.index(min(disUpRight))
pointUR = kpUpLeft[disUpRightIndex]
disDownRightIndex = disUpLeft.index(max(disUpLeft))
pointDR = kpUpLeft[disDownRightIndex]
disUpLeftIndex = disUpLeft.index(min(disUpLeft))
pointUL = kpUpLeft[disUpLeftIndex]
if (pointDR is not None) and (pointUL is not None) and (pointDL is not None) and (pointUR is not None):
# cv2.circle(color_img, (int(pointDR[0]),int(pointDR[1])), 30, (0, 255, 0),2)
# cv2.circle(color_img, (int(pointUL[0]),int(pointUL[1])), 30, (0, 255, 0),2)
# cv2.line(color_img,(int(pointDR[0]),int(pointDR[1])), (int(pointDL[0]),int(pointDL[1])),(0, 0, 255),2)
#
# cv2.circle(color_img, (int(pointDL[0]),int(pointDL[1])), 30, (0, 255, 0),2)
# cv2.circle(color_img, (int(pointUR[0]),int(pointUR[1])), 30, (0, 255, 0),2)
# cv2.line(color_img, (int(pointDL[0]),int(pointDL[1])), (int(pointUR[0]),int(pointUR[1])), (0, 0, 255), 2)
# cv2.line(color_img, (int(pointUL[0]),int(pointUL[1])), (int(pointUR[0]),int(pointUR[1])), (0, 0, 255), 2)
# 显示在原图上
cv2.circle(img, (int(pointDR[0]/2), int(pointDR[1]/2)), 10, (0, 255, 0), 2)
cv2.circle(img, (int(pointUL[0]/2), int(pointUL[1]/2)), 10, (0, 255, 0), 2)
cv2.line(img,(int(pointDR[0]/2),int(pointDR[1]/2)), (int(pointUL[0]/2),int(pointUL[1]/2)),(0, 0, 255),2)
dis_UR_DL = math.sqrt(math.pow(pointUR[0]-pointDL[0], 2) + math.pow(pointUR[1]-pointDL[1], 2))/2
DPIall.append(dis_UR_DL)
# print(dis_UR_DL)
global DPI
# 只计算斜对角线,约束条件简单一些,增加适用性
DPI = ( math.sqrt(2)) / sum(DPIall)
configFile_xml = "wellConfig.xml"
tree = ET.parse(configFile_xml)
root = tree.getroot()
secondRoot = root.find("DPI")
print(secondRoot.text)
secondRoot.text = str(DPI)
tree.write("wellConfig.xml")
print("DPI", DPI)
else:
pass
print(DPI)
# plt.imshow(color_img,interpolation='bicubic')
# fname = "key points"
# titlestr = '%s found %d keypoints' % (fname, len(keypoints))
# plt.title(titlestr)
# fig.canvas.set_window_title(titlestr)
# plt.show()
# cv2.imshow('findCorners', color_img)
cv2.imshow('findCorners', img)
cv2.waitKey()
if __name__ == "__main__":
# # # 单张图片测试
# img = cv2.imread("circles/Snap_7.jpg",1)
# mainFigure(img)
# 所有图片测试
for i in range(15):
fileName = "Snap_" + str(i) + ".jpg"
# img = cv2.imread("circles/Snap_007.jpg",1)
img = cv2.imread("circles/" + fileName,1)
print(fileName)
mainFigure(img)
wellConfig.xml
28
0.0024839966756101195
https://www.baidu.com/
Good