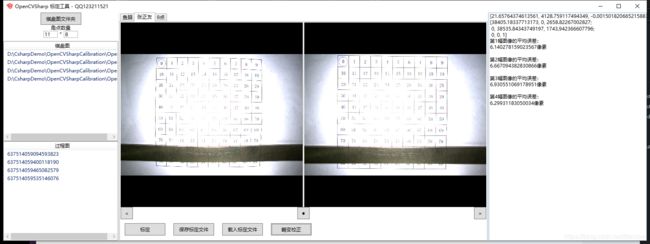
开源OpenCVSharp标定工具
本工具已经合并至开源项目opencvsharphelper:
[开源]OpenCVSharp工具
感谢点赞,Star;
这几天学习OpenCV的标定,顺手写个小工具,目前实现了鱼眼和张正友部分,
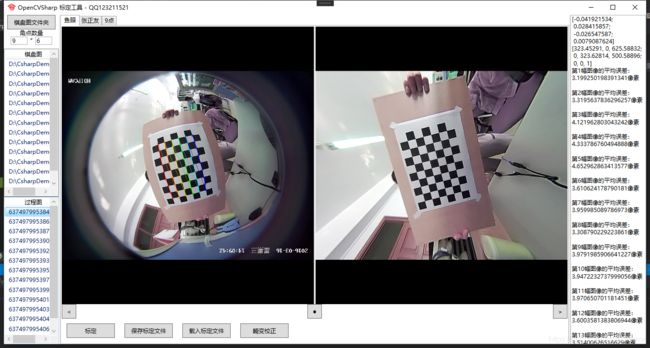
参考了python版本:https://www.jb51.net/article/200668.htm,也做了一些改动
import cv2
import numpy as np
import os
import glob
from matplotlib import pyplot as plt
CHECKERBOARD = (9,6)
subpix_criteria = (cv2.TERM_CRITERIA_EPS+cv2.TERM_CRITERIA_MAX_ITER, 30, 0.1)
calibration_flags = cv2.fisheye.CALIB_RECOMPUTE_EXTRINSIC
objp = np.zeros((1, CHECKERBOARD[0]*CHECKERBOARD[1], 3), np.float32)
objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
_img_shape = None
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.
images = glob.glob('./images/*.jpg')
if len(images)<1:
print("no image!")
for fname in images:
img = cv2.imread(fname)
plt.figure(figsize = (22, 22)),plt.subplot(121),plt.imshow(img),plt.title('img',color='white'),plt.xticks([]),plt.yticks([])
if _img_shape == None:
_img_shape = img.shape[:2]
else:
assert _img_shape == img.shape[:2], "All images must share the same size."
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# Find the chess board corners
ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD, cv2.CALIB_CB_ADAPTIVE_THRESH+cv2.CALIB_CB_FAST_CHECK+cv2.CALIB_CB_NORMALIZE_IMAGE)
# If found, add object points, image points (after refining them)
if ret == True:
objpoints.append(objp)
cv2.cornerSubPix(gray,corners,(3,3),(-1,-1),subpix_criteria)
imgdraw = img.copy()
cv2.drawChessboardCorners(imgdraw,CHECKERBOARD,corners,True)
plt.subplot(122),plt.imshow(imgdraw),plt.title('imgdraw',color='white'),plt.xticks([]),plt.yticks([]),plt.show()
imgpoints.append(corners)
N_OK = len(objpoints)
K = np.zeros((3, 3))
D = np.zeros((4, 1))
rvecs = [np.zeros((1, 1, 3), dtype=np.float64) for i in range(N_OK)]
tvecs = [np.zeros((1, 1, 3), dtype=np.float64) for i in range(N_OK)]
rms, _, _, _, _ = \
cv2.fisheye.calibrate(
objpoints,
imgpoints,
gray.shape[::-1],
K,
D,
rvecs,
tvecs,
calibration_flags,
(cv2.TERM_CRITERIA_EPS+cv2.TERM_CRITERIA_MAX_ITER, 20, 1e-6)
)
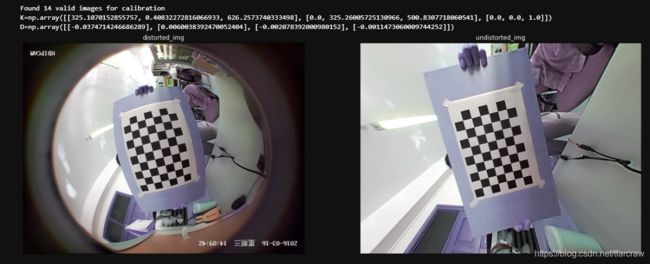
print("Found " + str(N_OK) + " valid images for calibration")
DIM=_img_shape[::-1]
print("K=np.array(" + str(K.tolist()) + ")")
print("D=np.array(" + str(D.tolist()) + ")")
for fname in images:
testimg = cv2.imread(fname)
plt.figure(figsize = (22, 22)),plt.subplot(121),plt.imshow(testimg),plt.title('distorted_img',color='white'),plt.xticks([]),plt.yticks([])
h,w = img.shape[:2]
map1, map2 = cv2.fisheye.initUndistortRectifyMap(K, D, np.eye(3), K, DIM, cv2.CV_16SC2)
undistorted_img = cv2.remap(testimg, map1, map2, interpolation=cv2.INTER_LINEAR, borderMode=cv2.BORDER_CONSTANT)
plt.subplot(122),plt.imshow(undistorted_img),plt.title('undistorted_img',color='white'),plt.xticks([]),plt.yticks([]),plt.show()
也参考了C++的版本:
//运行环境 VS2012+opencv3.0
#include
#include
using namespace std;
using namespace cv;
int main()
{
ofstream fout("caliberation_result.txt"); /** 保存定标结果的文件 **/
/************************************************************************
读取每一幅图像,从中提取出角点,然后对角点进行亚像素精确化
*************************************************************************/
cout<<"开始提取角点………………"< corners; /**** 缓存每幅图像上检测到的角点 ****/
vector> corners_Seq; /**** 保存检测到的所有角点 ****/
vector image_Seq;
int successImageNum = 0; /**** 成功提取角点的棋盘图数量 ****/
int count = 0;
for( int i = 0; i != image_count ; i++)
{
cout<<"Frame #"<>imageFileName;
imageFileName += ".jpg";
cv::Mat image = imread("img"+imageFileName);
/* 提取角点 */
Mat imageGray;
cvtColor(image, imageGray , CV_RGB2GRAY);
bool patternfound = findChessboardCorners(image, board_size, corners,CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE+
CALIB_CB_FAST_CHECK );
if (!patternfound)
{
cout<<"can not find chessboard corners!\n";
continue;
exit(1);
}
else
{
/* 亚像素精确化 */
cornerSubPix(imageGray, corners, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
/* 绘制检测到的角点并保存 */
Mat imageTemp = image.clone();
for (int j = 0; j < corners.size(); j++)
{
circle( imageTemp, corners[j], 10, Scalar(0,0,255), 2, 8, 0);
}
string imageFileName;
std::stringstream StrStm;
StrStm<>imageFileName;
imageFileName += "_corner.jpg";
imwrite(imageFileName,imageTemp);
cout<<"Frame corner#"<> object_Points; /**** 保存定标板上角点的三维坐标 ****/
Mat image_points = Mat(1, count, CV_32FC2, Scalar::all(0)); /***** 保存提取的所有角点 *****/
vector point_counts;
/* 初始化定标板上角点的三维坐标 */
for (int t = 0; t tempPointSet;
for (int i = 0; i rotation_vectors; /* 每幅图像的旋转向量 */
std::vector translation_vectors; /* 每幅图像的平移向量 */
int flags = 0;
flags |= cv::fisheye::CALIB_RECOMPUTE_EXTRINSIC;
flags |= cv::fisheye::CALIB_CHECK_COND;
flags |= cv::fisheye::CALIB_FIX_SKEW;
fisheye::calibrate(object_Points, corners_Seq, image_size, intrinsic_matrix, distortion_coeffs, rotation_vectors, translation_vectors, flags, cv::TermCriteria(3, 20, 1e-6));
cout<<"定标完成!\n";
/************************************************************************
对定标结果进行评价
*************************************************************************/
cout<<"开始评价定标结果………………"< image_points2; /**** 保存重新计算得到的投影点 ****/
cout<<"每幅图像的定标误差:"< tempPointSet = object_Points[i];
/**** 通过得到的摄像机内外参数,对空间的三维点进行重新投影计算,得到新的投影点 ****/
fisheye::projectPoints(tempPointSet, image_points2, rotation_vectors[i], translation_vectors[i], intrinsic_matrix, distortion_coeffs);
/* 计算新的投影点和旧的投影点之间的误差*/
vector tempImagePoint = corners_Seq[i];
Mat tempImagePointMat = Mat(1,tempImagePoint.size(),CV_32FC2);
Mat image_points2Mat = Mat(1,image_points2.size(), CV_32FC2);
for (size_t i = 0 ; i != tempImagePoint.size(); i++)
{
image_points2Mat.at(0,i) = Vec2f(image_points2[i].x, image_points2[i].y);
tempImagePointMat.at(0,i) = Vec2f(tempImagePoint[i].x, tempImagePoint[i].y);
}
err = norm(image_points2Mat, tempImagePointMat, NORM_L2);
total_err += err/= point_counts[i];
cout<<"第"<>imageFileName;
imageFileName += "_d.jpg";
imwrite(imageFileName,t);
}
cout<<"保存结束"< 和C#的winform张正友标定版本:https://gitee.com/UDCS/opencvsharp_calibration
然后自己写了一个wpf的版本:https://gitee.com/tfarcraw/opencvsharp-calibration
张正友标定: