V2X车路协同技术
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
@车路协同
车路协同被认为是实现无人驾驶的必要条件,现阶段随着单车智能的发展,在取得一定的成果的同时也不断暴露单车智能存在的问题,越来越多的企业开始涉足车路协同技术的研究。

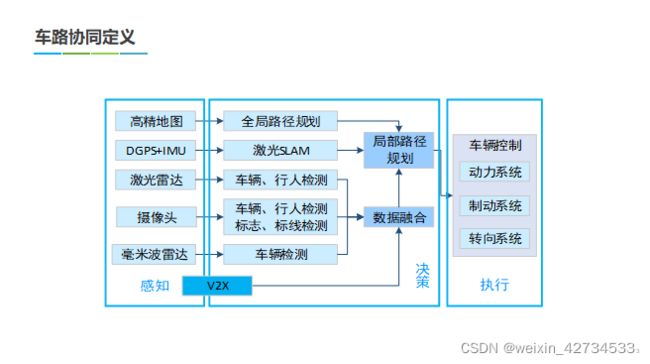
智能驾驶分为感知、决策、执行三大模块。通过高精度图、雷达、摄像头、DGPS和IMU等对自身及周围环境进行感知,通过对数据的融合和处理,完成对行人、车辆及其他障碍物的检测并规划局部路径,进而实现对车辆的横纵向及加速、制动等控制。针对智能驾驶汽车这一对象而言,V2X参与了部分感知和决策的功能,使车变得更加智能。从整个用车环境来看,智能车仅是V2X系统中的一部分。
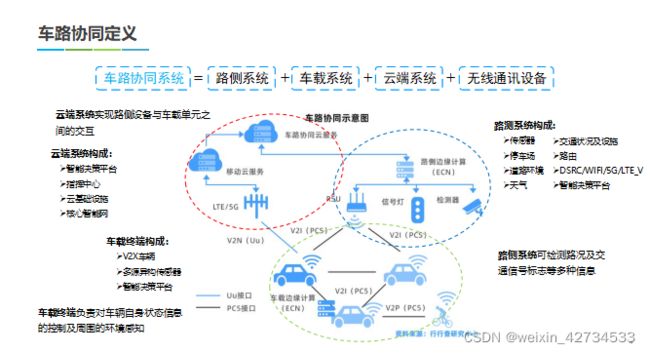
什么是车路协同,工信部给出的定义是:采用先进的无线通信及新一代互联网技术,全方位实现车车、车路动态的实时信息交互,在全时空动态交通信息采集与融合的基础上,开展车辆的安全控制及道路的协同管理,保证交通安全、提高通行效率,实现安全、高效、环保的道路交通系统。车路协同系统主要分为路测系统、车载系统、云端系统
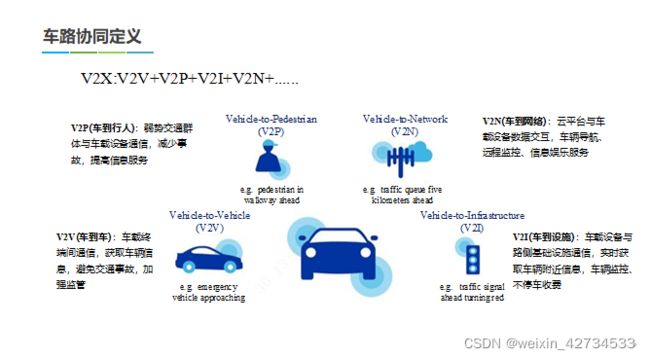
V2X,其目的,就是希望实现车辆与一切可能影响车辆的实体实现信息交互,目的是减少事故发生,减缓交通拥堵,降低环境污染,提升驾驶体验和安全性。
V2V(Vehicle to Vehicle,车到车) 是指通过车载终端进行车辆间的通信。车载终端可以实时获取周围车辆的车速、位置、行车情况等信息,V2V通信主要应用于避免或减少交通事故、车辆监督管理等。
V2P(Vehicle to Pedestrian,车到行人) V2P是指弱势交通群体(包括行人、骑行者等)。
V2N(Vehicle to Network,车到网络) V2N是指车载设备通过接入网/核心网与云平台连接,云平台与车辆之间进行数据交互。V2N通信主要应用于车辆导航、车辆远程监控、紧急救援、信息娱乐服务等。
V2I(Vehicle to Infrastructure,车到基础设施 ) 是指车载设备与路侧基础设施(如红绿灯、交通摄像头、路侧单元等)进行通信。V2I通信主要应用于实时信息服务、车辆监控管理、不停车收费等。
V2X将“人、车、路、云”等交通参与要素有机地联系在一起,可以支撑车辆获得比单车感知更多的信息,促进自动驾驶技术创新和应用;还有利于构建一个智慧的交通体系,具有重要意义。

自动驾驶经过这几年的发展,取得了显著的成效,并逐渐演化出两条发展道路,分别是:单车智能:通过改装汽车,改汽车装上大脑、加上眼睛:毫米波激光雷达等传感器,加上域控制器,高度以太网等使得汽车更加地聪明,能够实现L3、L4级别的自动驾驶,甚至是无人驾驶。
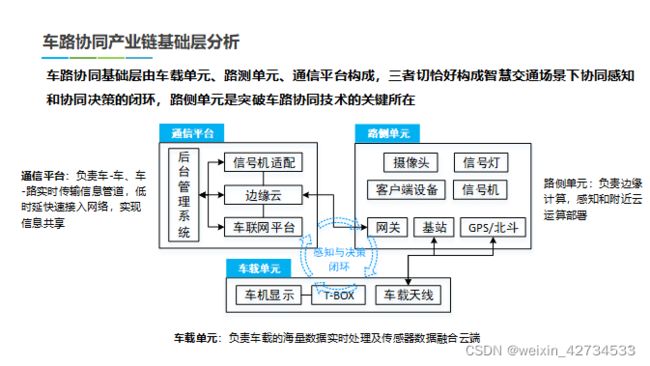
车路协同行业涉及面广、跨界融合特征突出、涵盖芯片、模组、终端、平台、测试验证、网络安全、系统集成等各个方面,总体而言可分为应用层、平台层、基础层三个层面,三者相互配合,实现协同感知和协同决策的闭环
T-BOX作为无线网关,为整车提供远程通讯接口,也兼具处理器的功能,通过远程无线通信、GPS卫星定位、加速传感器以及CAN通信等功能,实现行车数据、驾驶轨迹、车辆故障监控等信息的共享服务。通过T-BOX可以实现,手机端对车载端的控制,手机端发送控制指令,T-BOX接收,通过CAN总线通信的方式将控制报文发送对应的执行器模块单元,并通过T-BOX将执行结构反馈给手机端。
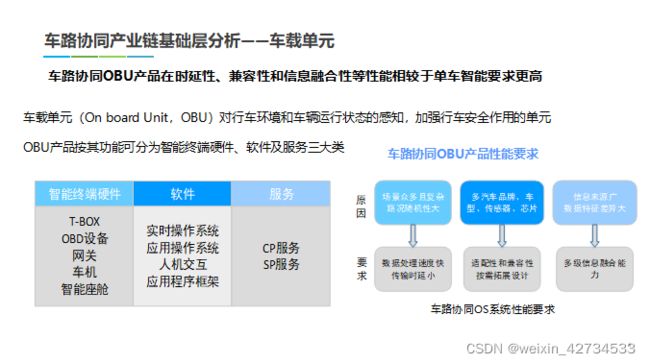
相较于单车智能路线下的软硬件产品,车路协同OBU产品在时延性、兼容性和信息融合性等方面的性能指标要求更高
车载单元,是起到驾驶员对行车环境和车辆运行状态的感知,加强行车安全作用的单元。OBU能够能够从各类传感器和车载网络中获取原始信息,解算出车路协同应用所需的底层信息,并传输给路测单元
OBU产品按其功能可分为智能终端与硬件、软件及服务三大类。智能终端及硬件:对数据进行输入、存储、加工及处理
软件:作为主导汽车信息技术发展的核心技术,包括:实时操作系统、人机交互及应用框架
服务:包括内容提供商和服务提供商两大类,满足人们对音乐、游戏等多媒体服务
车路协同技术的发展,对OBU的产品性能提出更高的要求。以车载OS平台为例,与普通OS相比,车路协同的OS在时延、兼容性及信息融合性方面提出更高要求。真实的交通环境参与者数量众多,行人和路况随机性大,这就要求操作系统的数据处理要快,传输时延要小。

路测单元是车路协同系统核心基础设施,是感知路网特征、道路参与者信息的交换枢纽,其主要覆盖场景为十字路口及高速公路。
路测单元不仅要对接多种信号和监测和管理,还需要与边缘云端、交通大脑进行数据交互。从总体上说车载RSU具备信息采集、传输和处理三大功能,从系统而划分为信息采集、通信网络以及交通控制。
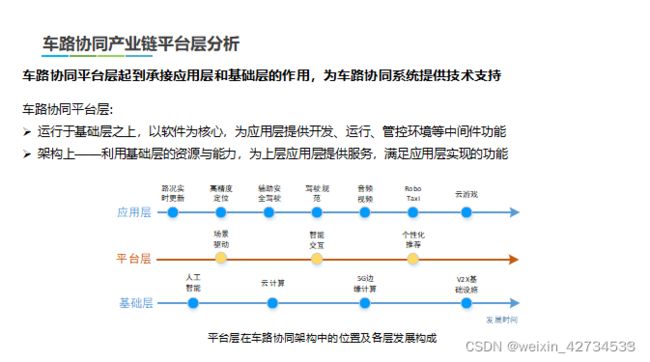
车路协同的平台层位于基础层与应用层之间,起到承接两层的功能,为车路协同提供技术支持。其中,基础层是车路协同的基础。主要是研发的硬件、软件、芯片、数据资源、云计算平台等,为系统提供数据及算力支持。应用层集成一种或多种基础应用技术,面向特定场景的需求而形成的软硬件产品及解决方案。
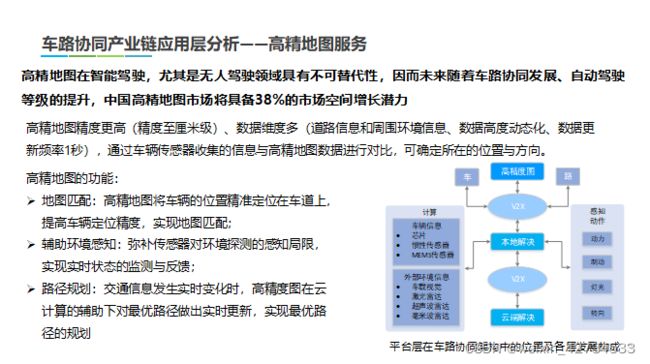
应用层,这里介绍智能驾驶中常用到的高精地图展开介绍。 不管是单车智能还是车路协同技术,都是核心技术之一,具有不可替代性。道路信息:车道线、路面转向/限速标记等地标;红绿灯、指示牌、防撞栏等,周围环境:商铺、公共机构。

车路协同系统内在包含的基础技术可依据其构成划分为智能车载单元关键技术、智能路侧关键技术、通信平合关键技术和其他关键技术。其中:V2X 技术是将车辆(V)与ー切事物(X)相连接的新一代信息通信技术,是车路协同最核心的基础技术,它将“人、车、路、云”等交通参与要素有机地联系在一起,不仅可有效补充单车智能的信息盲点,促进自动驾驶技术创新和应用,同时还有利于构建一个智慧的交通体系,促进汽车和交通服务的新模式新业态发展;
边缘计算是一种通过提供可用的、便捷的、按的网络访问,进入可配置的计算资源共享池(资源包括网络,服务器,存储,应用软件,服务)的技术。
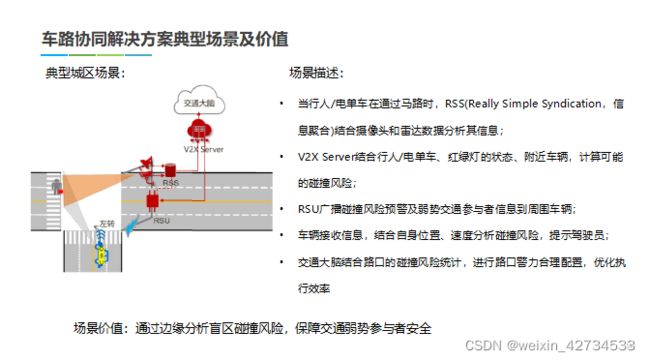
当行人/电单车在通过马路时,路侧RSU结合摄像头和雷达数据分析其位置、速度、行驶轨迹。
V2X Server结合行人/电单车、红绿灯的状态、附近车辆,计算可能的碰撞风险;同时将存在的风险定期反馈给交通大脑进行分析;RSU广播碰撞风险预警及弱势交通参与者信息到周围车辆;车辆接收到行人/电单车信息,结合车的位置、速度分析碰撞风险,通过HMI提示驾驶员;交通大脑结合路口的碰撞风险统计,进行路口警力合理配置,优化执行效率。

用户通过手机指定上车地点,预约车辆到达地点;路网运行商服务商根据用户发布信息指派车辆,并通过V2X Server获取路况信息;车辆根据停车场的RSU获取停车场高精度地图和高精度定位进行导航自行驾驶出停车场;(车流量大、交通拥堵的路况下,效果俱佳)车辆通过路边的RSU更新高精度地图和进行高精度定位并导航前往用户上车地点;车辆行驶过程中通过RSU获取信号灯状态并根据信号灯状态优化车辆通过速度,提升驾乘舒适性和节约能耗;车辆自动驾驶到用户上车点,由用户取车后,驾驶车辆到目的地。

车路协同是无人驾驶的必要条件,车路协同可助推自动驾驶在一定区域或者特定场景下迅速落地,极大降低自动驾驶车辆传感器的成本,以及整车控制系统实现难度。虽然车路协同面临以上发展阻碍,政府和企业也在积极探索,通过建立示范运营区,前期政府主导,后期商用,鼓励企业参与与探索,建立互联网,引入互联网、整机厂、供应商、构建上下游产业链,搭建产业联盟,构建智能产业生态圈,有效推动相关技术的落地。