汽车防滑控制不同控制策略车辆abs 门阈值 模糊pid
1、内容简介
略
507-可以交流、咨询、答疑
2、内容说明
汽车制动系统是十分重要的设备 。当汽车在 行驶过程中遇到意外情况时 , 制动系统立即起动
液压 、 电子等机构 , 将汽车迅速制动 。由于汽车刹 车时 , 轮胎摩擦存在较强的非线性 ,制动时间往往 存在一定的滞后 ; 另外使用传统方法进行制动时, 如果发生车轮抱死等意外情况 ,制动系统很难及 时作出反应 。
汽车防抱死制动系统 ( ABS ) 是一种先进的控 制技术 。 制动时 , 车轮不会抱死 , 还能保持良好的
附着力和转向性能 , 具有较好的制动稳定性 。通 过调节 ABS 的系统参数 ,可以有效提高制动性 能 。 目前 ABS 的主要控制方法有 : ①逻辑门限值 控制 ; ② 最优控制 ; ③ 模糊控制 ; ④ 滑模变结构控
制等等 。其中逻辑门限值控制方法中的门限值需 要通过大量试验来确定 , 控制性能不稳定 ; 最优控
制法的控制质量主要取决于模型的精确程度 ; 模 糊控制方法主要基于知识和经验的积累 , 建立控
制规则比较困难 ; 滑模变结构控制具有较好的鲁 棒性 , 能较好地解决非线性问题 。 因此 , 本文采用
这种变结构的控制系统 ,既大幅度降低了刹车距 离 , 又通过优化安全系数 , 提高了车辆的安全性
能 , 降低了车轮的危险性 ,有效抑制了制动过程中 出现的抖动现象 , 取得良好的制动效果 。
汽车制动通常分为 3 个阶段 : 第 1 阶段属于
稳态过程 , 汽车速度基本不变 ,制动系统实际还没 有起作用 , 即制动的反应滞后 ; 第 2 阶段是一个过 渡过程 , 制动系统开始起作用 , 制动力不断增大, 车轮开始边滚边滑 , 直至最后被抱死 ,这一过程决 定着汽车的制动性能和系统稳定性 ; 第 3 阶段为 车轮从抱死拖滑至汽车停止这一过程 ,此时制动 力基本不变 。
汽车在紧急制动时 ,车轮的运动状态主要受 制于车轮与路面的摩擦系数 。制动时如果前车 轮被抱死 , 摩擦系数降低 ,汽车容易失去抵抗侧向 运动的能力 ; 如果后轮被抱死 , 制动时方向稳定性
变差 , 汽车容易出现侧滑等现象 。
ABS 汽车制动液压系统原理如图 1 所示 ,系 统通过安装在车轮 、 车身上的各速度传感器采集
相应的转速信号 , 再通过电子控制模块 ( ECU ) 计 算汽车减速度及车轮的滑移率 ; 通过控制增压阀、 减压阀等液压单元 , 实时调节制动压力 ; 在紧急制 动时 , 只要发现前车轮或后车轮被抱死 , ECU 立 即发出指令 , 控制压力调节器和电动泵的转速 ,使 车轮能够转动 ; 即使在 ABS 不起作用时 ,制动系
统仍可调节后轮制动力 ,保证后轮不会比前轮先 抱死[1 ]。在汽车制动时 , ABS 通过控制车轮的运动状 态 , 使车轮的滑移率保持在 15% ~ 20% ,这样可 使制动时纵向附着力和制动力最大 ,从而缩短制 动距离 ; 同时由于制动时横向附着系数较大 ,使制 动系统保持一定的横向附着力 ,从而克服了侧滑 情况的发生 , 使汽车具有良好的转向能力 。
3、仿真分析
clear
clc
close all
load t1_1.mat
load t2_1.mat
load t3_1.mat
load t1.mat
load t4_1.mat
load y4_1.mat
load y1_1.mat
load y2_1.mat
load y3_1.mat
load y1.mat
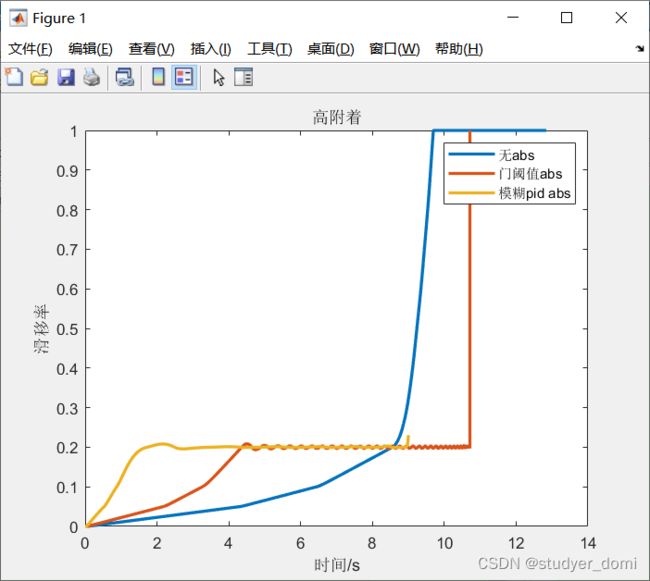
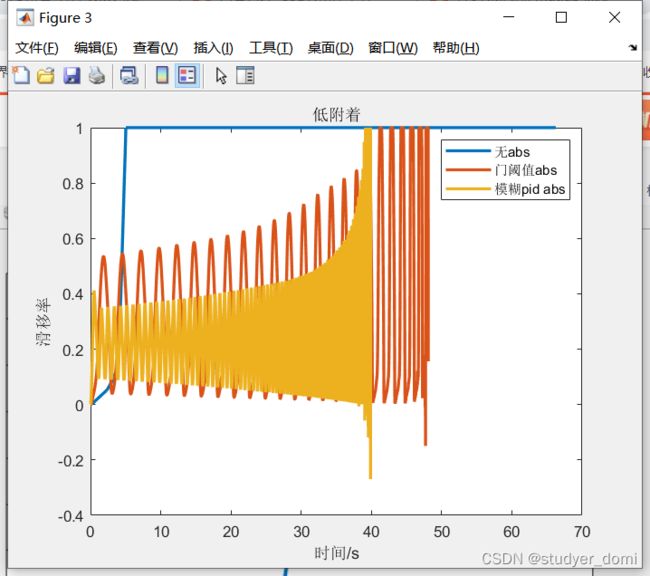
% 滑移率相关结果
figure
plot(t4_1,y4_1(:,1),t1_1,y1_1(:,1),t2_1,y2_1(:,1),t3_1,y3_1(:,1),t1,y1(:,1), 'linewidth',2)
xlabel 时间/s
ylabel 滑移率
title('滑移率')
legend('ADRC', '无abs', '门阈值abs', '模糊pid abs', '滑膜控制')
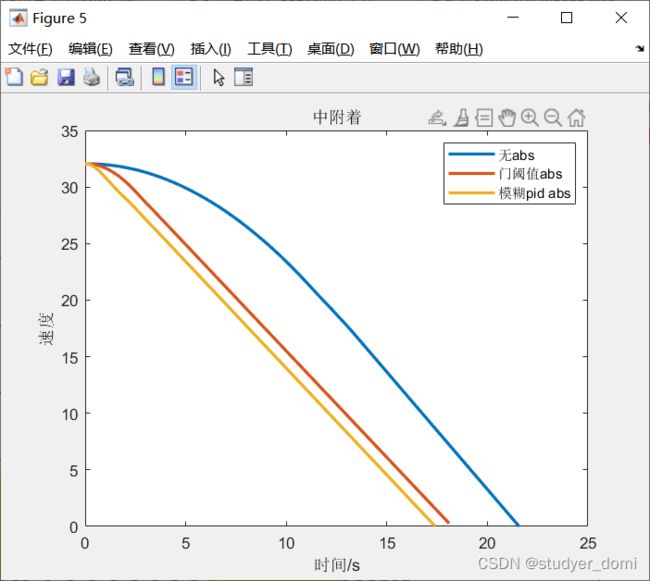
% 速度相关结果
figure
plot(t4_1,y4_1(:,2),t1_1,y1_1(:,2),t2_1,y2_1(:,2),t3_1,y3_1(:,2),t1,y1(:,2), 'linewidth',2)
xlabel 时间/s
ylabel 速度/m/s
title('速度')
legend('ADRC', '无abs', '门阈值abs', '模糊pid abs', '滑膜控制')
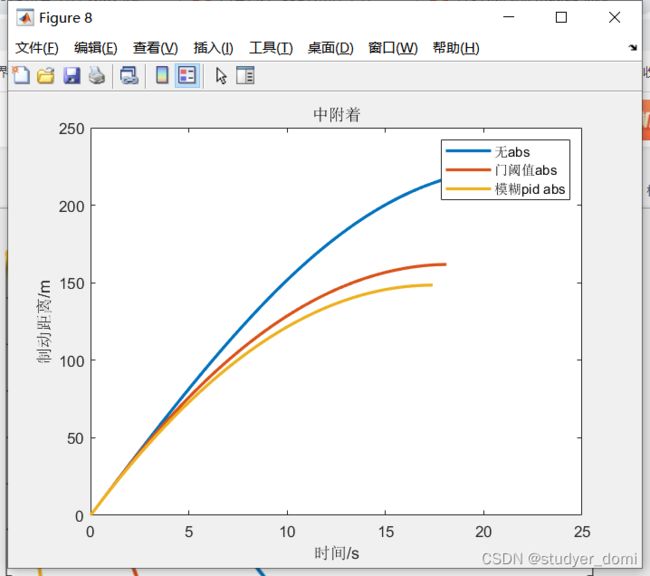
% 制动距离相关结果
figure
plot(t4_1,y4_1(:,3),t1_1,y1_1(:,3),t2_1,y2_1(:,3),t3_1,y3_1(:,3),t1,y1(:,3), 'linewidth',2)
xlabel 时间/s
ylabel 制动距离
title('制动距离')
legend('ADRC', '无abs', '门阈值abs', '模糊pid abs', '滑膜控制')
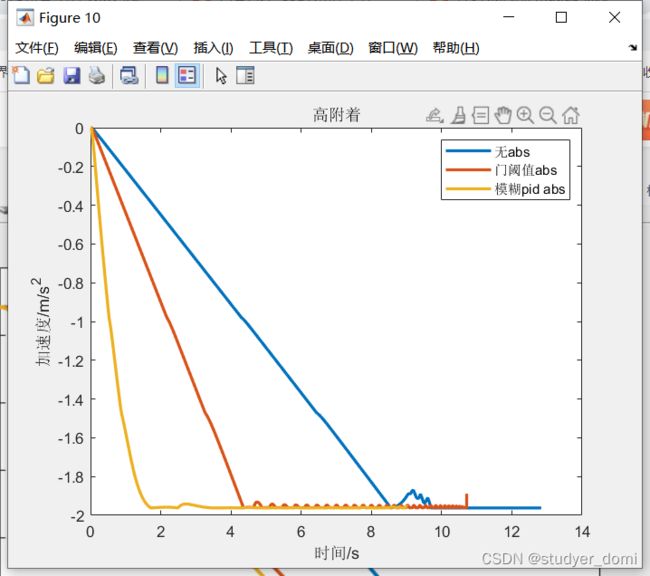
% 加速度相关结果
figure
plot(t4_1,y4_1(:,4),t1_1,y1_1(:,4),t2_1,y2_1(:,4),t3_1,y3_1(:,4),t1,y1(:,4), 'linewidth',2)
xlabel 时间/s
ylabel 加速度/m/s^2
title('加速度')
legend('ADRC', '无abs', '门阈值abs', '模糊pid abs', '滑膜控制')

4、参考论文
略
基于滑模变结构的ABS制动系统设计_曹勇 (1)
汽车防滑刹车系统滑模变结构控制器设计_袁跃