技术分享 | 为什么学习rrt_exploration实现自主建图容易掉坑?
在无人车领域当中,SLAM和导航两个部分一直是研究人员关注的重点,无人车作为移动机器人,这两个功能也十分重要,无人车到一个未知的环境中,人为控制无人车进行建图,建立好地图后,再使用导航,这是目前在无人车应用场景中十分常见的场景,但在实际应用过程中,还是存在局限性,很多应用场景下需要无人车在未知环境下自主地探索建图,而不是人为控制的情况下建图,自主探索也就由此而生。
rrt_exploration是基于RRT路径规划算法实现的搜索算法。之所以使用RRT算法是因为RRT对于未知区域有着强烈的倾向,在RRT exploration中,RRT主要用于生成边界点,这样对于探索边界点是很有好处的。所谓的边界点就是已经探索过的和未知的区域的交界点。
在ros当中使用rrt_exploration来实现自主建图,官方文档
(http://wiki.ros.org/rrt_exploration)说得比较清楚,这里简单地讲解一下流程,主要是针对一些容易掉进坑的地方说明一下,给大家排排雷。
一.下载rrt_exploration功能包
1.打开终端
2.进入你的工作空间/src文件下
cd catkin_ws/src
#将命令中的catkin_ws更换为你个人的工作空间名
3.下载rrt_exploration功能包
git clone
https://github.com/hasauino/rrt_exploration.git
二.下载相关依赖包(ros版本为kinetic)
OpenCV(cv2)
sudo apt-get install python-opencv
Numpy
sudo apt-get install python-numpy
Sklearn
sudo apt-get install python-scikits-learn
gmapping
sudo apt-get install ros-kinetic-gmapping
navigation
sudo apt-get install ros-kinetic-navigation
三.编译工作空间
1.进入你的工作空间
cd catkin_ws #将命令中的catkin_ws更换为你个人的工作空间名
2.编译
catkin_make
到这一个步骤,如果没有错误,那么rrt_exploration功能包的下载安装已经全部完成,接下来就到了使用阶段,在此,我推荐创建一个launch文件来达到使用自主探索建图功能的目的。我把自主探索建图功能分为两个模块,一个是自主探索功能,一个是建图功能,自主探索功能需要rrt_exploration和move_base,建图这里就采用gmapping。因此你的launch文件内需要包含3个内容:
① rrt_exploration
② move_base
③ gmapping
四.创建自主建图launch文件
1.随意在一个功能包内创建launch文件夹,并在launch文件夹中建立一个rrt_slam.launch文件
文件内容如下:
2.文件内容讲解
rrt_exploration
直接使用include包含就行,simple.launch是单机器人使用rrt_exploration的launch文件。
gmapping
也是直接使用include包含就行,gmapping的配置各种参考文档都很多,这里不过多讲解。
move_base
这部分要重点讲解一下,虽然rrt_exploration为单机器人创建了simple.launch文件,但大部分人使用依然会出现问题。原因这里就直接说明了。
大部分使用出现问题都在于这一句,注意到
name="move_base_node"这一段,这就是问题根源,
rrt_exploration作者是根据这一个命名来写代码的,但大部分ros使用者都是使用move_base这个命名,而作者的源代码采用的是move_base_node,而且没有在launch文件中给出接口来更改move_base的命名,因此大部分人在使用rrt_exploration的时候会发现move_base无法和rrt_exploraiton连接,导致自主探索功能失败,有两种解决办法:
①在launch文件中将move_base节点命名为move_base_node,这是最简单快捷的方法,也是推荐的方法。
②在源代码中修改move_base_node名,这个不推荐,因为需要修改的的地方很多,效率不高,还容易出错。
move_base配置部分:
这一段是作者配置的参数,应该是作者根据算法作出的调试,建议大家就使用作者默认的这一套参数。
这一段是全局代价地图和本地代价地图的设置全局代价地图和本地代价地图的参数类似
它们前四个参数分别代表
全局坐标名:在作者的设置中全局代价地图采用的是map,本地代价地图采用的是odom,我测试之后感觉本地代价地图改为map效果要好一些,所以我这里采用的是map。
机器人基坐标:这个基本上大家都类似,一般都是base_link或者base_footprint。
传感器坐标名:这个可能会有些区别,可以使用rosrun rqt_tf_tree rqt_tf_tree命令来查看激光的tf名,根据自己机器人的命名情况来修改。
传感器数据话题名:这个大部分应该都是scan,也是根据自己机器人的命名情况来修改。
五.使用基于rrt_exploration的自主探索功能
这里简单地给大家展示一下,跑一跑流程。我这里采用的是turtlebot3的仿真来测试一下。
1.启动turtlebot3仿真
roslaunch turtlebot3_gazebo turtlebot3_stage_4.launch
roslaunch turtlebot3_bringup turtlebot3_remote.launch
2.启动rrt_slam.launch
roslaunch rrt_exploration rrt_slam.launch
我这里是把这个launch文件放在rrt_exploration功能包里面的,根据个人情况调整命令即可。
通过rviz中的Publish Point设置四个点(推荐为一个矩形区域的四个顶点)为探索的范围,第五个点设置在机器人附近。
效果展示: 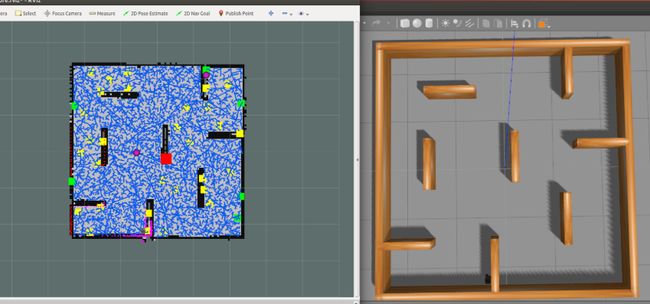
自主探索建图的效果还是不错的。
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。 阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!