Quaternion kinematics for error state kalman filter实现GPS+IMU融合,(附源码)
最近在学习kalman滤波相关的知识,恰好工作可能需要使用ESKF算法,因此将Joan Sola大神的书看了一遍,同时推导了相关的公式。俗话说得好:“Talk is cheap, show me the code。"因此我就想着如何将文章里面的算法实现一遍,加深对算法的记忆。
在网上查阅资料时,看到了博主利用高精度IMU模型实现了GPS+IMU的ESKF融合,这不巧了,数据啥的就都有了,只需要将代码的核心部分修改一下就可以了。
首先就是将源代码看了一遍,搞懂了输入输出,于是对代码进行了改写。附上github地址:GitHub - Shelfcol/gps_imu_fusion at Qk-ESKF-dev
(引流我的EKF实现GPS+IMU的融合)
先上效果图:(感觉还不错,gnss-ins-sim使用得low-accuracy IMU)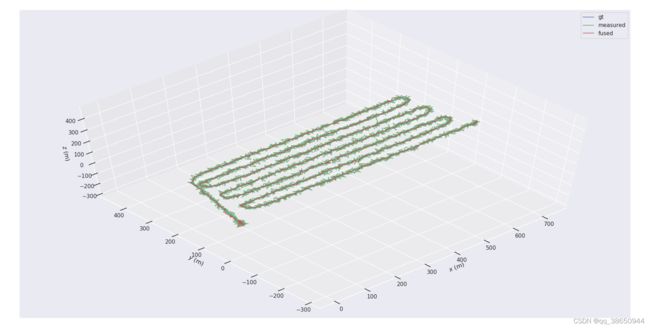
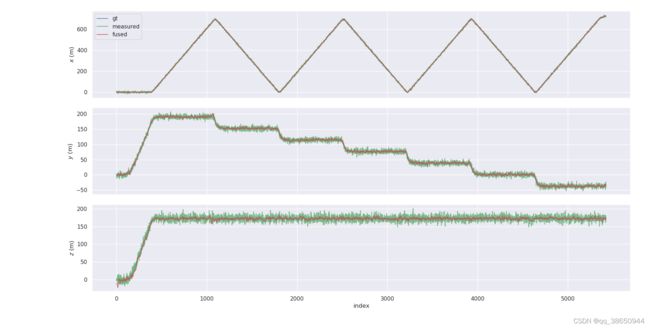
下面对算法进行讲解,并给出相应得代码段。
本文使用的名义状态量![]() , 误差状态量为
, 误差状态量为![]() ,这里需要注意一下,名义状态量多一维是因为利用四元数表示的旋转。
,这里需要注意一下,名义状态量多一维是因为利用四元数表示的旋转。
名义状态运动学方程为:

使用上述公式在IMU数据到来的预测阶段进行状态的预测:(需要注意的是,这里使用的IMU的加速度和角速度都是使用的IMU局部坐标系下的数值)
bool ESKFQK::UpdateOdomEstimation(const Eigen::Vector3d& a_m, const Eigen::Vector3d& w_m, const double dt) {
// 计算位置
Eigen::Matrix3d R = q_.toRotationMatrix();
pose_ += velocity_*dt+0.5*(R*(a_m-accel_bias_)+g_)*dt*dt;
velocity_ += (R*(a_m-accel_bias_)+g_)*dt;
Eigen::Vector3d d_theta = (w_m-gyro_bias_)*dt;
Eigen::AngleAxisd dq(d_theta.norm(),d_theta.normalized());//!
q_ = q_*Eigen::Quaterniond(dq);
return true;
}(矩阵块太难打,所以直接截图)
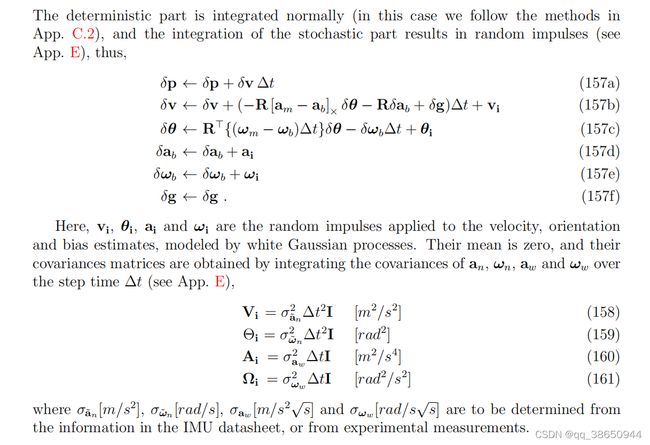
误差状态动力学公式为:
 这里需要注意的就是
这里需要注意的就是![]() 的更新:书上使用的是
的更新:书上使用的是![]() 生成的旋转矩阵的转置来旋转原本的
生成的旋转矩阵的转置来旋转原本的![]() 。而我根据s上的公式(155)
。而我根据s上的公式(155)
![]()
所以对![]() 的更新使用的公式为
的更新使用的公式为
![]()
公式157c的推导没搞明白,如果有理解的仁兄还望不吝赐教。
 完全是利用误差状态动力学公式推导而来,这里不再赘述,直接贴图。需要注意的是误差状态的预测方程(164)是无用的,因为在只有IMU数据时,误差状态为0,所以(164)没有实质作用。
完全是利用误差状态动力学公式推导而来,这里不再赘述,直接贴图。需要注意的是误差状态的预测方程(164)是无用的,因为在只有IMU数据时,误差状态为0,所以(164)没有实质作用。

对应的代码块:
bool ESKFQK::UpdateErrorState(const Eigen::Vector3d& a_m, const Eigen::Vector3d& w_m, const double dt) {
Eigen::Matrix3d A_M = BuildSkewMatrix(a_m-accel_bias_);
// Fx
Fx_.setZero(); // 初始化为零矩阵
Fx_.block<3,3>(0,0) = Fx_.block<3,3>(3,3) = Fx_.block<3,3>(9,9) = Fx_.block<3,3>(12,12) = Fx_.block<3,3>(15,15)= Eigen::Matrix3d::Identity();
Eigen::Matrix3d R = q_.toRotationMatrix();
Fx_.block<3,3>(INDEX_STATE_POSI,INDEX_STATE_VEL) = Eigen::Matrix3d::Identity()*dt;
Fx_.block<3,3>(INDEX_STATE_VEL,INDEX_STATE_ORI) = -R*A_M*dt;
Fx_.block<3,3>(INDEX_STATE_VEL,INDEX_STATE_ACC_BIAS) = -R*dt;
Fx_.block<3,3>(INDEX_STATE_VEL,INDEX_STATE_GYRO_BIAS) = Eigen::Matrix3d::Identity()*dt;
Eigen::AngleAxisd AngleAxis_w(((w_m-gyro_bias_)*dt).norm(),((w_m-gyro_bias_)*dt).normalized());
Eigen::Matrix3d R_w(AngleAxis_w);
Fx_.block<3,3>(INDEX_STATE_ORI,INDEX_STATE_ORI) = R_w.transpose();//公式157c
// Fx_.block<3,3>(INDEX_STATE_ORI,INDEX_STATE_ORI) = Eigen::Matrix3d::Identity()-BuildSkewMatrix(w_m-gyro_bias_)*dt;//自己使用的公式
Fx_.block<3,3>(INDEX_STATE_ORI,INDEX_STATE_GYRO_BIAS) = -Eigen::Matrix3d::Identity()*dt;
P_ = Fx_*P_*Fx_.transpose()+Fi_*Qi_*Fi_.transpose();
return true;
}当有GPS数据到来的时候,则进行观测更新。因为GPS只有位置,所以可观测的数据只有位置。则对应的![]()
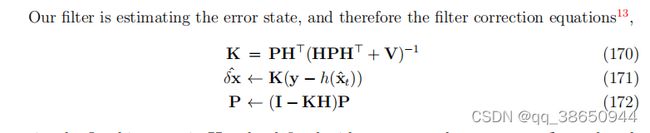
其中的H矩阵不是关于名义状态量,而是关于误差状态量的,同时是在真实状态![]() 处获得。因为当前还没有进行观测,所以误差状态的均值为0,所以
处获得。因为当前还没有进行观测,所以误差状态的均值为0,所以![]() 。
。

其中 ![]() ,这也是标准的EKF步骤中使用的观测矩阵。
,这也是标准的EKF步骤中使用的观测矩阵。
而![]() 求解如下
求解如下

对应的代码如下:
bool ESKFQK::ObservationOfErrorState()
{
Hx_.setZero();
Hx_.block<3,3>(0,0) = Eigen::Matrix3d::Identity();
// X_dx_;
X_dx_.block<6,6>(0,0) = Eigen::Matrix::Identity();
X_dx_.block<9,9>(10,9) = Eigen::Matrix::Identity();
double qx = q_.x();
double qy = q_.y();
double qz = q_.z();
double qw = q_.w();
X_dx_.block<4,3>(6,6) = 0.5*(Eigen::Matrix()<<-qx,-qy,-qz,
qw,-qz,qy,
qz,qw,-qx,
-qy,qx,qw).finished();
H_ = Hx_*X_dx_;
K_ = P_ * H_.transpose() * (H_ * P_ * H_.transpose() +V_).inverse(); // kalman增益
X_ = K_*(curr_gps_data_.position_ned - pose_);
P_ = (TypeMatrixP::Identity() - K_ * H_) * P_*(TypeMatrixP::Identity() - K_ * H_).transpose()+K_*V_*K_.transpose();
} 下一步就需要将误差量加入到名义状态里面:(需要注意的是这里使用的是右乘,因为是绕动轴旋转)
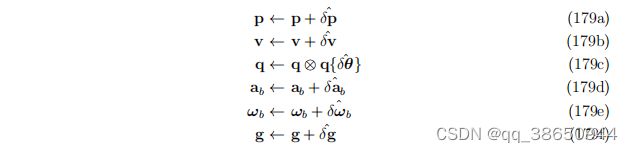
// 估计值=估计值+误差量
void ESKFQK::EliminateError() {
pose_ +=X_.block<3,1>(INDEX_STATE_POSI,0);
velocity_ += X_.block<3,1>(INDEX_STATE_VEL, 0);
Eigen::Matrix3d C_nn = Sophus::SO3d::exp(X_.block<3,1>(INDEX_STATE_ORI, 0)).matrix();
q_ = q_*Eigen::Quaterniond(C_nn);
accel_bias_ += X_.block<3,1>(INDEX_STATE_ACC_BIAS, 0);
gyro_bias_ += X_.block<3,1>(INDEX_STATE_GYRO_BIAS, 0);
g_ += X_.block<3,1>(INDEX_STATE_G,0);
}最后还需要重置ESKF:
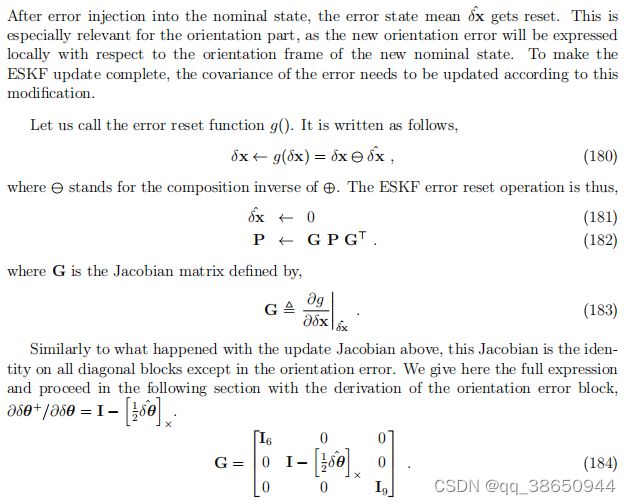
void ESKFQK::ResetState() {
X_.setZero();
// P = G'PG'^T
Eigen::Matrix G;
G.setIdentity();
G.block<3,3>(6,6) -= BuildSkewMatrix(0.5*X_.block<3,1>(INDEX_STATE_ORI, 0));
P_ = G*P_*G.transpose();
} 这样就大功告成啦!
说一点调参的经验,需要注意状态量的方差设置要与实际的传感器的精度对应。
参考文献:[1]J Solà. Quaternion kinematics for the error-state Kalman filter[J]. 2017.
[2]【附源码+代码注释】误差状态卡尔曼滤波(error-state Kalman Filter),扩展卡尔曼滤波,实现GPS+IMU融合,EKF ESKF GPS+IMU_一点儿也不萌的萌萌的博客-CSDN博客_误差卡尔曼