qt-opencv图像增强之边缘检测(多线程)
qt-opencv图像增强之边缘检测(多线程)
- 1 .pro项目文件配置
- 2 ui设计
- 3 多线程逻辑
- 4 Canny边缘检测和Laplace算子
-
- 4.1 Canny边缘检测
- 4.2 L a p l a c e Laplace Laplace算子
- 5 主要代码
- 6 运行结果
1 .pro项目文件配置
INCLUDEPATH += /usr/local/include \
/usr/local/include/opencv
/usr/local/include/opencv2
LIBS += /usr/local/lib/libopencv_* \
2 ui设计
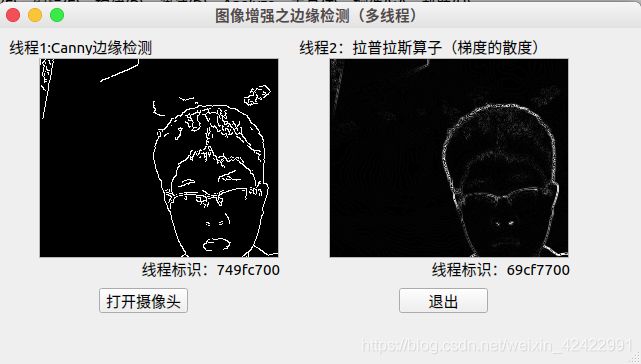
左边是Canny边缘检测结果,右边是 L a p l a c e Laplace Laplace算子(梯度的散度)结果,分别用QLabel显示图像。下面是两个QPushButton,参考运行结果。
3 多线程逻辑
几个重要的点:
- 附属于子线程的对象,其函数在子线程中运行。需要使用信号槽使该函数运行,主线程直接调用会在主线程运行。
- 子线程中重写的void run()方法,在子线程中运行。
- 通过信号槽机制传递参数,将参数从信号所属的对象,传递到槽所属对象。
- 更好的设计是,将ui与数据的处理使用不同线程完成。
这里使用第一条,即将对象附属到子线程。

括号中…点表示携带参数,对于Mat类型这里传递的是指针,传引用时失败了。
- 定义两个子类:
基类–>子类
QThread–>MyThread,MyThread类中不重写run()函数,也不添加信号和槽等,默认的即可。
QObject–>Worker,Worker类中写要处理的事务。 - mainwindow中,点击“打开摄像头”按钮后的主要流程:
(1) MyThread线程类对象启动线程start()
(2) mainwindow对象发送operate(…)信号
(3) Worker类对象接受到信号后,执行task(…)事务
(4) MyThread线程类对象wait()阻塞主线程,等待MyThread子线程任务完成。
(5) 回到(2)
4 Canny边缘检测和Laplace算子
4.1 Canny边缘检测
Canny, J. “A Computational Approach To Edge Detection”(《一种边缘检测的计算方法》). IEEE Trans. Pattern Analysis and Machine Intelligence. 1986, (8): 679–714
4.2 L a p l a c e Laplace Laplace算子
二阶微分算子,定义为梯度的散度。具有各向同性
△ f = ▽ ∙ ▽ f = ∂ 2 f ∂ x 2 + ∂ 2 f ∂ y 2 \bigtriangleup f= \bigtriangledown \bullet \bigtriangledown f= \frac{\partial ^2f}{\partial x^2}+\frac{\partial ^2f}{\partial y^2} △f=▽∙▽f=∂x2∂2f+∂y2∂2f
离散后,对应的卷积核为
| 0 | 1 | 0 |
| 1 | -4 | 1 |
| 0 | 1 | 0 |
5 主要代码
worker.cpp如下
#include "worker.h"
#include
}
if (flag == 1 ) //拉普拉斯算子,梯度的散度
{
this->laplaceGrad(*src,*dst);
}
emit threadId((int*)QThread::currentThreadId()); //当前线程id返回
}
//laplace任务
void Worker::laplaceGrad(cv::Mat& src,cv::Mat& dst)
{
if (src.channels()!=1)
return;
int rows = src.rows;
int cols = src.cols;
dst = cv::Mat::zeros(rows,cols,CV_32FC1);
for (int i=1;i<rows-1;i++)
{
for (int j=1;j<cols-1;j++)
{
// [1,1,1;1,-8,1;1,1,1]
dst.ptr<float>(i)[j] = 1.0*src.ptr<uchar>(i-1)[j-1]+1.0*src.ptr<uchar>(i-1)[j]+1.0*src.ptr<uchar>(i-1)[j+1]
+1.0*src.ptr<uchar>(i)[j-1]-8.0*src.ptr<uchar>(i)[j]+1.0*src.ptr<uchar>(i)[j+1]
+1.0*src.ptr<uchar>(i+1)[j-1]+1.0*src.ptr<uchar>(i+1)[j]+1.0*src.ptr<uchar>(i+1)[j+1];
}
}
cv::convertScaleAbs( dst, dst, 1, 0 ); // 从CV_32FC1转换到CV_8UC1
}
worker.h
#ifndef WORKER_H
#define WORKER_H
#include mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
#includemainwindow.h
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include 6 运行结果